一种基于传感器网络的分布式耦合张量流分解方法
本发明属于信号处理领域,尤其是涉及一种基于传感器网络的分布式耦合张量流分解方法。
背景技术:
1、张量将矩阵推广到了两个以上的维度,高阶张量及其分解普遍应用于信号处理、数据分析和机器学习等领域。在传感器网络(sn)中,不同传感器观测到的特征可能会出现重叠,可以用耦合张量模型表示测量的多维数据,从而捕获多维特征。由于大多数的张量分解算法都是针对批处理提出的,而针对数据流的研究相对较少,因此对耦合张量流分解的研究意义很大。
技术实现思路
1、针对上述问题,本发明提出一种基于传感器网络的分布式耦合张量流分解方法。
2、本发明采用的技术方案为:
3、一种基于传感器网络的分布式耦合张量流分解方法,包括以下步骤:
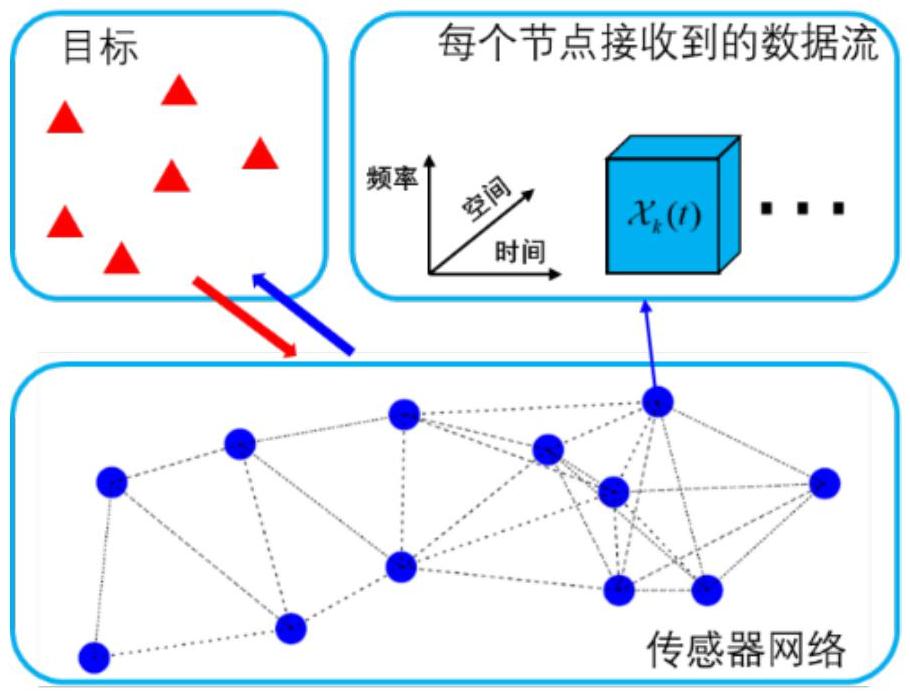
4、s1、对于如图1所示的分布式传感器网络,设定表示传感器节点构成的有向动态图,节点集为随时间变化的边集表示双向数据链路,将传感器节点k在t时刻的邻域记为并且表示节点k在t时刻的度;
5、s2、将时刻t在传感器节点k处接收到的张量切片建模为:
6、
7、其中,是在时刻t和节点k∈v处的n阶张量流,秩为r;是n阶的单位对角张量,满足当且仅当r1=…=rn时否则表示节点k第p个共享因子矩阵,p=1,…,p;表示节点k的私有因子矩阵,iq是张量流中iq-1维张量的个数,q=p+1,…,n;是节点k在t时刻的第n个因子矩阵;是张量测量噪声;
8、s3、仅考虑因子矩阵的随机游走,同时固定模n并假设当n′≠n且n′=1,2,...,n时已知,建立耦合张量流分解的凸优化问题为:
9、
10、其中,是根据的时变因子矩阵;f(·)是因子矩阵的固有动态模型;是每个传感器节点处的过程噪声;是一般凸损失函数,ωk是权重;
11、s4、利用交替方向乘子法求解s3建立的凸优化问题,在frobenius范数的条件下,对增广拉格朗日函数中的三个参数进行初始化得到其中是对偶变量,n=1,...,n,则在第j次迭代中共享因子矩阵的更新如下:
12、
13、其中,y(p),k(t)是任意节点k接收到的张量沿模-p的展开且z⊙表示khatri-rao乘积,表示转置,是第j-1次迭代得到的节点k的第p个共享因子矩阵,是第j-1次迭代得到的对偶变量,x是优化变量,j=1,2,…,ρ是正则化因子;
14、第p个共享因子矩阵的更新方式如下:
15、
16、其中第j次迭代得到的对偶变量k是传感器网络中的节点数,p=1,…,p;
17、如果当前迭代估计的共享因子矩阵与前一次迭代估计的结果近似,两者差距符合设定的收敛条件,此时迭代优化终止;
18、s5、在较松弛的条件下张量分解是唯一的,可使用交替最小二乘法估计每个传感器节点的因子矩阵。需要注意的是,如果张量分解不唯一,得到的因子矩阵并不具备可靠的研究意义。利用交替最小二乘法得到第j次迭代估计的因子矩阵为:
19、
20、式中:是节点k经过第j次迭代估计得到第p个共享因子矩阵,是节点k经过第j次迭代估计得到第q-p个私有因子矩阵,ir是秩为r的单位矩阵,
21、p=1,…,p且q=p+1,…,n;
22、s6、利用平均共识算法提高节点间共享因子矩阵的准确性,首先设定以及p=1,…,p,再根据s5的因子矩阵进行cp分解,并且仅依靠每个节点接收到的张量切片得到节点k的估计因子矩阵然后在每个节点上对共享因子矩阵进行平均共识,其中wk,k(t)是节点k的当前自权重,wk,k′(t)是节点k赋予邻点k′的共识权重,具体为:
23、在平均共识迭代算法的初始阶段,设定节点k的第p个因子矩阵和其对偶变量为有:
24、
25、其中,与分别是节点k经过第l次共识迭代得到的第p个因子矩阵和对偶变量,与分别是邻点k′经过第l-1次共识迭代得到的第p个因子矩阵和对偶变量;
26、当完成l次迭代后,令p=1,…,p有:
27、
28、其中,与分别是节点k经过第l次共识迭代得到的第p个因子矩阵和对偶变量,是节点k第p个估计的因子矩阵;
29、使用共识的结果作为t+1时刻的交替最小二乘算法的初始值,并重复p次迭代过程;
30、s7、迭代优化结束后,得到节点k的估计因子矩阵为
31、本发明的有益效果:本发明是一种关于完全分布式的耦合张量流分解方法。首先假设所有传感器的测量数据均可用,并且不能使用分布式方法处理,从而推导出耦合张量流分解算法;然后利用平均共识(ac)算法对相同特征进行融合,从而实现以完全分布式方法来进行张量流分解。本方法无需之前时间点的张量测量数据,计算复杂度不会随时间增大,因为当前时刻对每个维度估计的参数都会用于下一时刻的初始化。计算机仿真结果表明本发明使用完全分布式的方式,维持了每个节点的私有维度;仅通过传感器网络交换共享因子矩阵,保证了低的通信复杂度。
技术特征:
1.一种基于传感器网络的分布式耦合张量流分解方法,其特征在于,包括以下步骤:
技术总结
本发明属于信号处理领域,尤其是涉及一种基于传感器网络的分布式耦合张量流分解方法。本发明假设所有传感器的测量数据均可用,并且不能使用分布式方法处理,从而推导出耦合张量流分解算法;然后利用平均共识(AC)算法对相同特征进行融合,从而实现以完全分布式方法来进行张量流分解。本方法无需之前时间点的张量测量数据,计算复杂度不会随时间增大,因为当前时刻对每个维度估计的参数都会用于下一时刻的初始化。本方法使用完全分布式的方式,维持了每个节点的私有维度;仅通过传感器网络交换共享因子矩阵,保证了低的通信复杂度。
技术研发人员:张花国,付裕,刘传现,李亮亮
受保护的技术使用者:电子科技大学
技术研发日:
技术公布日:2024/11/11
- 还没有人留言评论。精彩留言会获得点赞!