障碍物误匹配关系解除方法、装置、设备及存储介质与流程
本发明涉及自动驾驶,尤其涉及一种障碍物误匹配关系解除方法、装置、设备及存储介质。
背景技术:
1、现有毫米波雷达与相机的后融合匹配方案只是考虑毫米波雷达检测的障碍物与相机检测的障碍物各种物理量(横纵坐标、横纵向速度或者横纵向加速度等),并没有考虑两种障碍物在逻辑是否真的应该匹配,比如车道上的相机障碍物和路沿上的毫米波雷达障碍物可能离得非常近,但是这两种障碍物被匹配在一起的可能性应该要比同时在车道上的距离类似的两种障碍物要低的多,但是现有的技术处理这两种情况下的匹配,匹配的可能性是一致的。
2、现有的后融合技术只是应用障碍物本身的关系进行匹配关联计算,并没有考虑各种障碍物所处周围的环境,这样会做的缺点是有很大概率会产生误匹配,尤其是当传感器有误检的时候,比如当相机偶尔将车道上的运动障碍物检测为静态,现有的匹配方法就很容易将相机结果与路沿上的毫米波雷达检测到的静态障碍物相匹配,产生误匹配,导致错误的融合结果,影响自动驾驶的安全性。
技术实现思路
1、本发明的主要目的在于提供一种障碍物误匹配关系解除方法、装置、设备及存储介质,旨在解决现有技术中后融合匹配容易产生误匹配,导致错误的融合结果,影响自动驾驶的安全性的技术问题。
2、第一方面,本发明提供一种障碍物误匹配关系解除方法,所述障碍物误匹配关系解除方法包括以下步骤:
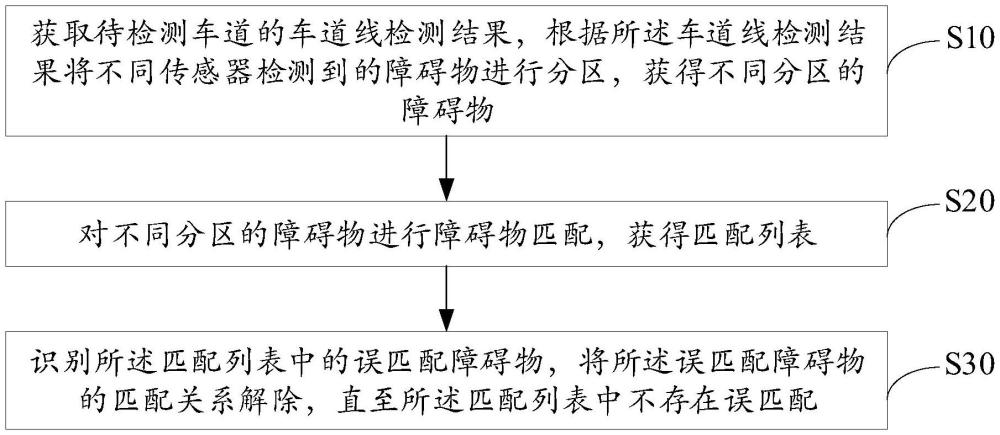
3、获取待检测车道的车道线检测结果,根据所述车道线检测结果将不同传感器检测到的障碍物进行分区,获得不同分区的障碍物;
4、对不同分区的障碍物进行障碍物匹配,获得匹配列表;
5、识别所述匹配列表中的误匹配障碍物,将所述误匹配障碍物的匹配关系解除,直至所述匹配列表中不存在误匹配。
6、可选地,所述获取待检测车道的车道线检测结果,根据所述车道线检测结果将不同传感器检测到的障碍物进行分区,获得不同分区的障碍物,包括:
7、获取待检测车道的车道线检测结果,根据所述车道线检测结果将不同传感器检测到的障碍物进行分区,获得分区后的车道上障碍物和车道外障碍物。
8、可选地,所述对不同分区的障碍物进行障碍物匹配,获得匹配列表,包括:
9、获取毫米波雷达检测结果,根据所述毫米波雷达检测结果将最左边车道线和最右边车道线附近的静态障碍物设置为路沿类型障碍物;
10、根据最邻近搜索原则搜索离所述沿类型障碍物最近的毫米波雷达识别障碍物结果和相机识别障碍物结果;
11、对所述毫米波雷达识别障碍物结果和所述相机识别障碍物结果进行匹配,获得匹配列表。
12、可选地,所述对所述毫米波雷达识别障碍物结果和所述相机识别障碍物结果进行匹配,获得匹配列表,包括:
13、根据预设匹配条件对所述毫米波雷达识别障碍物结果和所述相机识别障碍物结果进行匹配,获得所述毫米波雷达识别障碍物结果和所述相机识别障碍物结果匹配的匹配列表。
14、可选地,所述识别所述匹配列表中的误匹配障碍物,将所述误匹配障碍物的匹配关系解除,直至所述匹配列表中不存在误匹配,包括:
15、对所述匹配列表进行遍历,获取所述匹配列表中成对匹配的目标毫米波雷达障碍物的横向距离和目标相机障碍物的横向距离的横向距离差值;
16、判断所述横向距离差值是否大于预设宽度,根据差值判断结果识别所述匹配列表中的误匹配障碍物;
17、将所述误匹配障碍物的匹配关系解除,直至所述匹配列表中不存在误匹配。
18、可选地,所述判断所述横向距离差值是否大于预设宽度,根据差值判断结果识别所述匹配列表中的误匹配障碍物,包括:
19、判断所述横向距离差值是否大于预设宽度,获得差值判断结果;
20、在所述差值判断结果为所述横向距离差值不大于所述预设宽度时,保留当前匹配关系;
21、在所述差值判断结果为所述横向距离差值大于所述预设宽度时,判断所述目标毫米波雷达障碍物的类型是否为路沿类型,获得类型判断结果;
22、根据所述类型判断结果识别所述匹配列表中的误匹配障碍物。
23、可选地,所述根据所述类型判断结果识别所述匹配列表中的误匹配障碍物,包括:
24、在所述类型判断结果为所述目标毫米波雷达障碍物的类型不为路沿类型时,保留所述当前匹配关系;
25、在所述类型判断结果为所述目标毫米波雷达障碍物的类型为路沿类型时,判断所述目标相机障碍物的类型是否为路沿类型;
26、在所述目标相机障碍物的类型不为路沿类型时,保留所述当前匹配关系;
27、在所述目标相机障碍物的类型为路沿类型时,判断所述目标相机障碍物的纵向速度是否小于预设速度阈值;
28、在所述纵向速度小于所述预设速度阈值时,识别出所述匹配列表中的误匹配障碍物,解除所述误匹配障碍物的当前匹配关系;
29、在所述纵向速度不小于所述预设速度阈值时,保留所述当前匹配关系,继续识别所述匹配列表中新的误匹配障碍物,直至所述匹配列表中不存在误匹配。
30、第二方面,为实现上述目的,本发明还提出一种障碍物误匹配关系解除装置,所述障碍物误匹配关系解除装置包括:
31、分区模块,用于对获取待检测车道的车道线检测结果,根据所述车道线检测结果将不同传感器检测到的障碍物进行分区,获得不同分区的障碍物;
32、障碍物匹配模块,用于对不同分区的障碍物进行障碍物匹配,获得匹配列表;
33、解除模块,用于识别所述匹配列表中的误匹配障碍物,将所述误匹配障碍物的匹配关系解除,直至所述匹配列表中不存在误匹配。
34、第三方面,为实现上述目的,本发明还提出一种障碍物误匹配关系解除设备,所述障碍物误匹配关系解除设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的障碍物误匹配关系解除程序,所述障碍物误匹配关系解除程序配置为实现如上文所述的障碍物误匹配关系解除方法的步骤。
35、第四方面,为实现上述目的,本发明还提出一种存储介质,所述存储介质上存储有障碍物误匹配关系解除程序,所述障碍物误匹配关系解除程序被处理器执行时实现如上文所述的障碍物误匹配关系解除方法的步骤。
36、本发明提出的障碍物误匹配关系解除方法,通过获取待检测车道的车道线检测结果,根据所述车道线检测结果将不同传感器检测到的障碍物进行分区,获得不同分区的障碍物;对不同分区的障碍物进行障碍物匹配,获得匹配列表;识别所述匹配列表中的误匹配障碍物,将所述误匹配障碍物的匹配关系解除,直至所述匹配列表中不存在误匹配;能够避免了误匹配导致融合结果错误的产生,避免了误匹配后造成的可能的刹车或者自动紧急刹车,提升了自动驾驶的安全性,提高了雷达和相机障碍物识别融合结果的准确性,提高了障碍物误匹配关系解除的速度和效率。
技术特征:
1.一种障碍物误匹配关系解除方法,其特征在于,所述障碍物误匹配关系解除方法包括:
2.如权利要求1所述的障碍物误匹配关系解除方法,其特征在于,所述获取待检测车道的车道线检测结果,根据所述车道线检测结果将不同传感器检测到的障碍物进行分区,获得不同分区的障碍物,包括:
3.如权利要求1所述的障碍物误匹配关系解除方法,其特征在于,所述对不同分区的障碍物进行障碍物匹配,获得匹配列表,包括:
4.如权利要求3所述的障碍物误匹配关系解除方法,其特征在于,所述对所述毫米波雷达识别障碍物结果和所述相机识别障碍物结果进行匹配,获得匹配列表,包括:
5.如权利要求1所述的障碍物误匹配关系解除方法,其特征在于,所述识别所述匹配列表中的误匹配障碍物,将所述误匹配障碍物的匹配关系解除,直至所述匹配列表中不存在误匹配,包括:
6.如权利要求5所述的障碍物误匹配关系解除方法,其特征在于,所述判断所述横向距离差值是否大于预设宽度,根据差值判断结果识别所述匹配列表中的误匹配障碍物,包括:
7.如权利要求6所述的障碍物误匹配关系解除方法,其特征在于,所述根据所述类型判断结果识别所述匹配列表中的误匹配障碍物,包括:
8.一种障碍物误匹配关系解除装置,其特征在于,所述障碍物误匹配关系解除装置包括:
9.一种障碍物误匹配关系解除设备,其特征在于,所述障碍物误匹配关系解除设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的障碍物误匹配关系解除程序,所述障碍物误匹配关系解除程序配置为实现如权利要求1至7中任一项所述的障碍物误匹配关系解除方法的步骤。
10.一种存储介质,其特征在于,所述存储介质上存储有障碍物误匹配关系解除程序,所述障碍物误匹配关系解除程序被处理器执行时实现如权利要求1至7中任一项所述的障碍物误匹配关系解除方法的步骤。
技术总结
本发明公开了一种障碍物误匹配关系解除方法、装置、设备及存储介质,所述方法通过获取待检测车道的车道线检测结果,根据所述车道线检测结果将不同传感器检测到的障碍物进行分区,获得不同分区的障碍物;对不同分区的障碍物进行障碍物匹配,获得匹配列表;识别所述匹配列表中的误匹配障碍物,将所述误匹配障碍物的匹配关系解除,直至所述匹配列表中不存在误匹配;能够避免了误匹配导致融合结果错误的产生,避免了误匹配后造成的可能的刹车或者自动紧急刹车,提升了自动驾驶的安全性,提高了雷达和相机障碍物识别融合结果的准确性,提高了障碍物误匹配关系解除的速度和效率。
技术研发人员:杨帆,吴鹏,陈猛,吴洁
受保护的技术使用者:东风商用车有限公司
技术研发日:
技术公布日:2024/12/10
- 还没有人留言评论。精彩留言会获得点赞!