一种地面点云投影到图像生成mask的方法及相关设备与流程
本发明涉及自动驾驶3d投影,尤其涉及的是一种地面点云投影到图像生成mask的方法及相关设备。
背景技术:
1、在自动驾驶过程中,需要对前方路况进行准确识别,以实现车辆的安全行驶。目前自动驾驶车辆一般通过采集点云数据,通过对点云数据进行分割、目标检测等处理,以识别前方路况。
2、现有技术中通常利用全局点云分割技术对采集到的点云数据进行分割,以得到地面点云,但是全局点云分割技术还无法准确分割出每一帧的地面点云,因此地面点云分割的精确度低,若采用人工标注出mask进而实现点云分割的方式,则会造成人力资源的浪费,且效率低,无法满足自动驾驶车辆需要准确识别前方路况的需求。
3、因此,现有技术中的方法需要进一步的改进。
技术实现思路
1、鉴于上述相关技术中的不足之处,本发明的目的在于提供一种地面点云投影到图像生成mask的方法及相关设备,克服现有技术中地面点云分割时mask精确度低的缺陷。
2、本发明解决技术问题所采用的技术方案如下:
3、本实施例公开了一种地面点云投影到图像生成mask的方法,其中,包括:
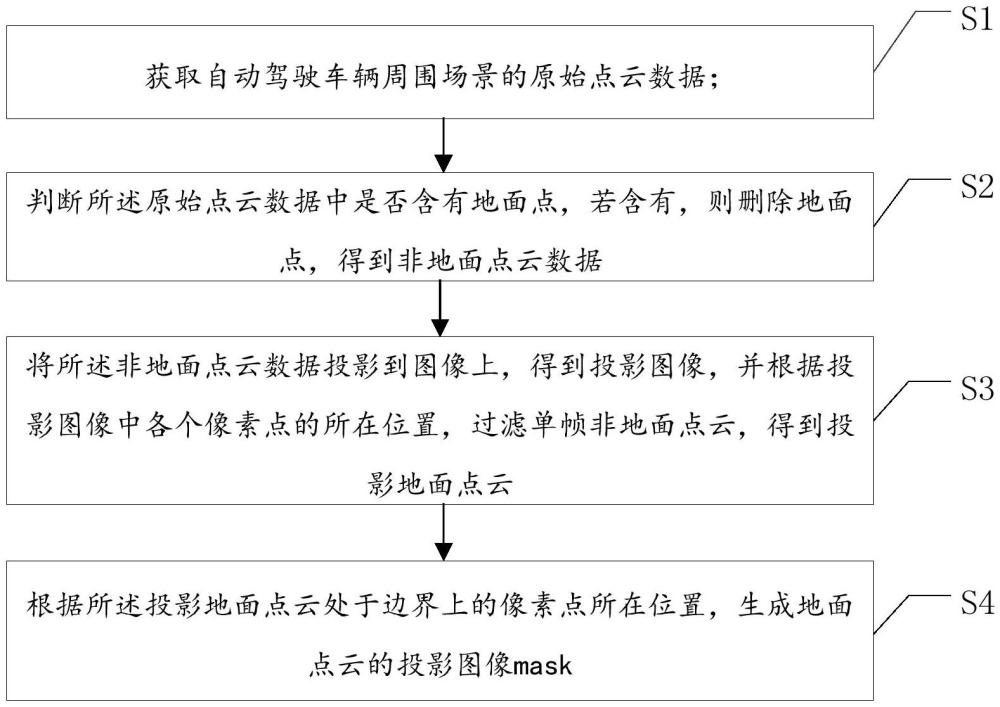
4、获取自动驾驶车辆周围场景的原始点云数据;
5、判断所述原始点云数据中是否含有地面点,若含有,则删除地面点,得到非地面点云数据;
6、将所述非地面点云数据投影到图像上,得到投影图像,并根据投影图像中各个像素点的所在位置,过滤单帧非地面点云,得到投影地面点云;
7、根据所述投影地面点云处于边界上的像素点所在位置,生成地面点云的投影图像mask。
8、可选地,所述判断所述原始点云数据中是否含有地面点的步骤包括:
9、将原始点云数据与对应帧的全局地面点云数据在kdtree上求近邻,以位于所述原始点云数据的预设范围内的点云数据判定为地面点。
10、可选地,所述将所述非地面点云数据投影到图像上,得到投影图像的步骤包括:
11、将所述非地面点云数据的位置坐标转映射到相机坐标系下,得到相机坐标系下的投影图像。
12、可选地,所述根据投影图像中各个像素点的所在位置,过滤单帧非地面点云,得到投影地面点云的步骤包括:
13、将投影图像分成多个图像块,根据每个图像块中各个像素点所在位置坐标确定出单帧非地面点云,并过滤所述单帧非地面点云,得到投影地面点云。
14、可选地,所述根据每个图像块中各个像素点所在位置坐标确定出单帧非地面点云的步骤,包括:
15、对每一个图像块中的像素点求凸包;
16、将各个图像块中处于凸包区域内的像素点判定为单帧非地面点云。
17、可选地,所述根据投影图像中各个像素点的所在位置,过滤单帧非地面点云,得到投影地面点云的步骤之后,还包括:
18、利用预设尺寸的滑动窗口,以预设滑动步长依次判定处于滑动窗口内的像素点数是否小于预设数值,若小于预设数值,则将滑动窗口内的像素点清除。
19、可选地,根据所述投影地面点云处于边界上的像素点所在位置,生成地面点云的投影图像mask的步骤包括:
20、获取投影地面点云中处于边界上的像素点,并将处于边界上的像素点过滤,以过滤边界上像素点后的区域生成为地面点云的投影图像mask所在区域。
21、第二方面,本实施例公开了一种地面点云投影到图像生成mask的系统,其中,包括:
22、数据集获取模块,用于获取自动驾驶车辆周围场景的原始点云数据;
23、点云判定模块,用于判断所述原始点云数据中是否含有地面点,若含有,则删除地面点,得到非地面点云数据;
24、点云过滤模块,用于将所述非地面点云数据投影到图像上,得到投影图像,并根据投影图像中各个像素点的所在位置,过滤单帧非地面点云,得到投影地面点云;
25、生成模块,用于根据所述投影地面点云处于边界上的像素点所在位置,生成地面点云的投影图像mask。
26、第三方面,本实施例公开了一种车辆,其中,所述车辆包括存储器、处理器及存储在所述存储器中并可在所述处理器上运行的地面点云投影到图像生成mask的程序,所述处理器执行所述地面点云投影到图像生成mask的程序时,实现所述的地面点云投影到图像生成mask的方法的步骤。
27、第四方面,本实施例公开了一种计算机可读存储介质,其中,所述计算机可读存储介质上存储有地面点云投影到图像生成mask的程序,所述地面点云投影到图像生成mask的程序被处理器执行时,实现所述的地面点云投影到图像生成mask的方法的步骤。
28、有益效果:
29、本实施例公开了一种地面点云投影到图像生成mask的方法及相关设备,通过获取自动驾驶车辆周围场景的原始点云数据;判断所述原始点云数据中是否含有地面点,若含有,则删除地面点,得到非地面点云数据;将所述非地面点云数据投影到图像上,得到投影图像,并根据投影图像中各个像素点的所在位置,过滤单帧非地面点云,得到投影地面点云;根据所述投影地面点云处于边界上的像素点所在位置,生成地面点云的投影图像mask。本实施例方法通过判断并清除错误的点云投影信息,从而确保生成mask的准确性,并且本实施例方法实施方便,降低了需要人工标注造成的人力成本的浪费,且不需要大量模型训练,提高了点云投影的效率。
技术特征:
1.一种地面点云投影到图像生成mask的方法,其特征在于,包括:
2.根据权利要求1所述的地面点云投影到图像生成mask的方法,其特征在于,所述判断所述原始点云数据中是否含有地面点的步骤包括:
3.根据权利要求1所述的地面点云投影到图像生成mask的方法,其特征在于,所述将所述非地面点云数据投影到图像上,得到投影图像的步骤包括:
4.根据权利要求1所述的地面点云投影到图像生成mask的方法,其特征在于,所述根据投影图像中各个像素点的所在位置,过滤单帧非地面点云,得到投影地面点云的步骤包括:
5.根据权利要求4所述的地面点云投影到图像生成mask的方法,其特征在于,所述根据每个图像块中各个像素点所在位置坐标确定出单帧非地面点云的步骤,包括:
6.根据权利要求4所述的地面点云投影到图像生成mask的方法,其特征在于,所述根据投影图像中各个像素点的所在位置,过滤单帧非地面点云,得到投影地面点云的步骤之后,还包括:
7.根据权利要求1所述的地面点云投影到图像生成mask的方法,其特征在于,根据所述投影地面点云处于边界上的像素点所在位置,生成地面点云的投影图像mask的步骤包括:
8.一种地面点云投影到图像生成mask的系统,其特征在于,包括:
9.一种车辆,其特征在于,所述车辆包括存储器、处理器及存储在所述存储器中并可在所述处理器上运行的地面点云投影到图像生成mask的程序,所述处理器执行所述地面点云投影到图像生成mask的程序时,实现如权利要求1-7任一项所述的地面点云投影到图像生成mask的方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有地面点云投影到图像生成mask的程序,所述地面点云投影到图像生成mask的程序被处理器执行时,实现如权利要求1-7任一项所述的地面点云投影到图像生成mask的方法的步骤。
技术总结
本发明公开了一种地面点云投影到图像生成mask的方法及相关设备,通过获取自动驾驶车辆周围场景的原始点云数据;判断所述原始点云数据中是否含有地面点,若含有,则删除地面点,得到非地面点云数据;将所述非地面点云数据投影到图像上,得到投影图像,并根据投影图像中各个像素点的所在位置,过滤单帧非地面点云,得到投影地面点云;根据所述投影地面点云处于边界上的像素点所在位置,生成地面点云的投影图像mask。本发明方法通过判断并过滤错误的点云投影信息,从而确保生成mask的准确性,本发明方法实施方便,避免了人工标注造成时人力成本的浪费,节约了成本,且不需要大量模型训练,提高了点云投影的效率。
技术研发人员:彭博
受保护的技术使用者:深圳元戎启行科技有限公司
技术研发日:
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!