用于剔除噪声地图中的动态点云的方法、装置与设备
本发明涉及机器人平台建图定位导航,尤其涉及一种用于剔除噪声地图中的动态点云的方法、装置、电子设备、非暂态计算机可读存储介质以及计算机程序产品。
背景技术:
1、随着自动驾驶技术以及机器人技术的发展,同时定位与地图构建slam(simultaneous localization and mapping)技术受到越来越广泛的关注。其中,根据使用传感器类型的差异,slam可分为视觉slam和激光slam两类。所述视觉slam对光照和纹理要求高且在复杂环境中的鲁棒性不足;所述激光slam具有更高的鲁棒性和精度。
2、现有技术中,通常基于三维激光雷达的slam建图算法(例如,lego-loam、lio-sam和fast-lio2等)在静态场景中构建较高精度的点云地图。
3、但是,现有技术的激光slam方法,都是基于静态场景或低动态场景的假设,而在实际的建图场景中存在大量动态物体,例如,行人和车辆等;因此,现有技术的激光slam方法无法有效去除所建点云地图中的动态点云(即,关于动态物体的点云)。
技术实现思路
1、本发明提供一种用于剔除噪声地图中的动态点云的方法、装置、电子设备、非暂态计算机可读存储介质以及计算机程序产品,用以解决现有技术中的缺陷。
2、本发明提供一种用于剔除噪声地图中的动态点云的方法,包括:
3、获取当前时刻的点云数据帧、噪声地图以及位姿信息;
4、其中,所述点云数据帧由当前时刻全局坐标系下的点云数据构成,记作当前帧;所述噪声地图为包含动态点云的三维点云地图,由所述当前时刻以前的点云数据帧在噪声地图坐标系下拼接形成;
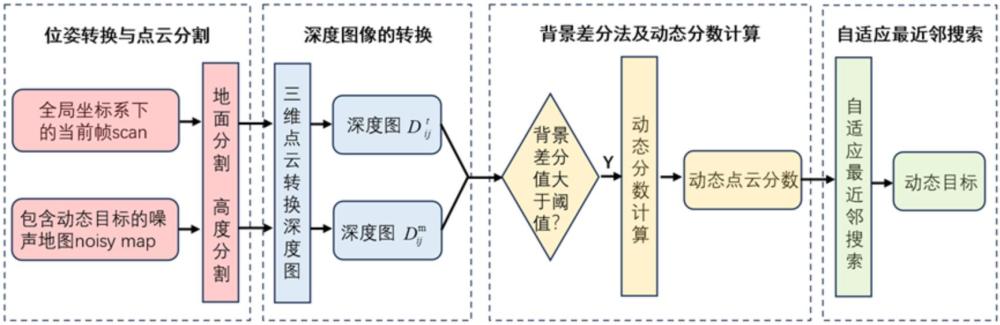
5、基于所述当前帧、噪声地图以及位姿信息,利用预设深度转换规则,确定第一深度图和第二深度图;其中,所述第一深度图对应所述当前帧,所述第二深度图对应所述噪声地图;所述第一深度图和第二深度图的尺寸以及包含的像素数量相同;
6、基于所述第一深度图和第二深度图,利用背景差分原则,确定所述当前帧中的至少一个第一动态点云;
7、基于所述至少一个第一动态点云,利用自适应最近邻搜索规则,在所述噪声地图中确定第二动态点云集合;
8、将所述第二动态点云集合从所述噪声地图中删除,得到优化点云地图。
9、本发明还提供一种用于剔除噪声地图中的动态点云的装置,包括:
10、数据获取模块,被配置为:获取当前时刻的点云数据帧、噪声地图以及位姿信息;其中,所述点云数据帧由当前时刻全局坐标系下的点云数据构成,记作当前帧;所述噪声地图为包含动态点云的三维点云地图,由所述当前时刻以前的点云数据帧在噪声地图坐标系下拼接形成;
11、深度图转换模块,被配置为:基于所述当前帧、噪声地图以及位姿信息,利用预设深度转换规则,确定第一深度图和第二深度图;其中,所述第一深度图对应所述当前帧,所述第二深度图对应所述噪声地图;所述第一深度图和第二深度图的尺寸以及包含的像素数量相同;
12、差分以及动态计算模块,被配置为:基于所述第一深度图和第二深度图,利用背景差分原则,确定所述当前帧中的至少一个第一动态点云;
13、自适应搜索模块,被配置为:基于所述至少一个第一动态点云,利用自适应最近邻搜索规则,在所述噪声地图中确定第二动态点云集合;
14、噪声删除模块,被配置为:将所述第二动态点云集合从所述噪声地图中删除,得到优化点云地图。
15、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述用于剔除噪声地图中的动态点云的方法。
16、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述用于剔除噪声地图中的动态点云的方法。
17、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述用于剔除噪声地图中的动态点云的方法。
18、如上所述,本发明用于剔除噪声地图中的动态点云的方法,通过对当前帧和包含动态点云的噪声地图做点云的地面分割和高度分割;将点云的深度信息转换成视觉可用的图像信息,利用视觉理论中的背景差分法对当前帧和噪声地图进行深度图像对比,筛选出初始动态点云并进行动态分数计算;根据动态分数对所述噪声地图进行自适应最近邻搜索以剔除其中的动态点云,从而最终可有效剔除所述噪声地图中的动态物体,得到优化点云地图;进而可为后续下游的定位导航任务提供有效支撑。
技术特征:
1.一种用于剔除噪声地图中的动态点云的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,基于所述当前帧、噪声地图以及位姿信息,利用预设深度转换规则,确定第一深度图和第二深度图,包括:
3.根据权利要求1所述的方法,其特征在于,基于所述第一深度图和第二深度图,利用背景差分原则,确定所述当前帧中的至少一个第一动态点云,包括:
4.根据权利要求1所述的方法,其特征在于,基于所述至少一个第一动态点云,利用自适应最近邻搜索规则,在所述噪声地图中确定第二动态点云集合,包括:
5.一种用于剔除噪声地图中的动态点云的装置,其特征在于,包括:
6.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至4任一项所述用于剔除噪声地图中的动态点云的方法。
7.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至4任一项所述用于剔除噪声地图中的动态点云的方法。
8.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至4任一项所述用于剔除噪声地图中的动态点云的方法。
技术总结
本发明提供一种用于剔除噪声地图中的动态点云的方法、装置与设备,其中,方法包括:获取当前时刻的点云数据帧、噪声地图以及位姿信息;基于当前帧、噪声地图以及位姿信息,利用预设深度转换规则,确定第一深度图和第二深度图;第一深度图对应当前帧,第二深度图对应噪声地图;第一深度图和第二深度图的尺寸以及包含的像素数量相同;基于第一深度图和第二深度图,利用背景差分原则,确定当前帧中的至少一个第一动态点云;基于至少一个第一动态点云,利用自适应最近邻搜索规则,在噪声地图中确定第二动态点云集合;将第二动态点云集合从噪声地图中删除,得到优化点云地图。利用本发明的方法,可有效剔除噪声地图中的动态物体,得到优化点云地图。
技术研发人员:李云飞,蒋林,陈跃龙,许仁波,万乐,徐苑
受保护的技术使用者:武汉科技大学
技术研发日:
技术公布日:2024/11/21
- 还没有人留言评论。精彩留言会获得点赞!