一种基于KAN-Transformer和模糊推理的人机交互行为评价方法
本发明涉及人机共融的物理人机交互操作,具体而言,涉及一种基于kan-transformer和模糊推理的人机交互行为评价方法。
背景技术:
1、随着机器人技术的不断发展,智能机器人出现在人们的生产生活中,机器人代替人类完成危险作业是机器人应用的重要方向,特别在如核电站、深海、太空等作业场景中,机器人代替作业人员工作能够降低人类的安全风险。受当前传感、控制、机构和人工智能等技术水平的限制,设计制造出能在未知环境中自主完成任务的全自主型机器人还有很大的难度。借助人类智慧和行为经验增强机器人作业能力是机器人遥操作发展的重要动机,安全、可靠的遥操作技术能够增加机器人的作业潜力。在遥操作任务的人机交互过程中,人类帮助机器人进行不确定或者未知环境中难以实现的决策及规划,而机器人可以代替人类去远距离环境或者恶劣环境中完成任务。
2、在遥操作任务过程中,远端操作员的行为直接影响现场机器人运动,熟练的操作将提升任务实施成功率。在人机交互过程中,需要智能体来预测操作员的运动轨迹,来评价操作员的行为。
技术实现思路
1、本发明实施例提供了一种基于kan-transformer和模糊推理的人机交互行为评价方法,以至少解决现有技术中在遥操作任务中,无法确定目标用户的行为的熟练程度的技术问题。
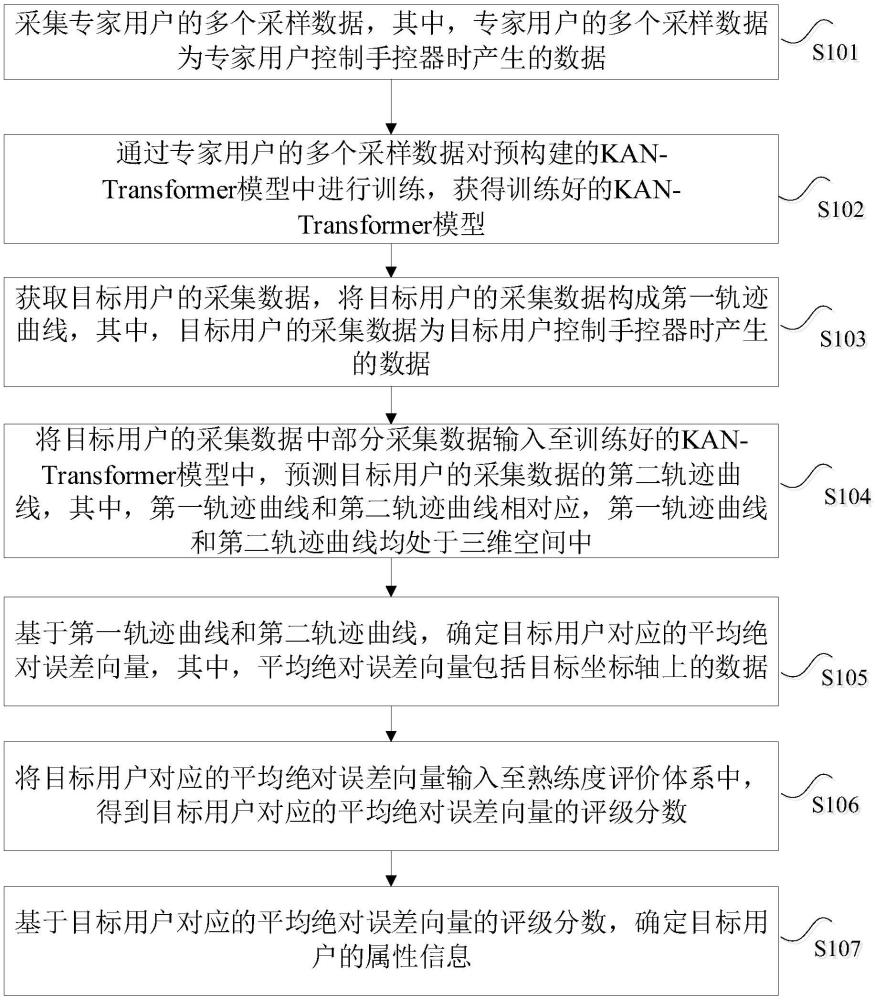
2、根据本发明实施例的一个方面,提供了一种基于kan-transformer和模糊推理的人机交互行为评价方法。其中,该方法可以包括:采集专家用户的多个采样数据,其中,专家用户的多个采样数据为专家用户控制手控器时产生的数据;通过专家用户的多个采样数据对预构建的kan-transformer模型中进行训练,获得训练好的kan-transformer模型;获取目标用户的采集数据,将目标用户的采集数据构成第一轨迹曲线,其中,目标用户的采集数据为目标用户控制手控器时产生的数据;将目标用户的采集数据中部分采集数据输入至训练好的kan-transformer模型中,预测目标用户的采集数据的第二轨迹曲线,其中,第一轨迹曲线和第二轨迹曲线相对应,第一轨迹曲线和第二轨迹曲线均处于三维空间中;基于第一轨迹曲线和第二轨迹曲线,确定目标用户对应的平均绝对误差向量,其中,平均绝对误差向量包括目标坐标轴上的数据;将目标用户对应的平均绝对误差向量输入至熟练度评价体系中,得到目标用户对应的平均绝对误差向量的评级分数;基于目标用户对应的平均绝对误差向量的评级分数,确定目标用户的属性信息。
3、可选地,预构建的kan-transformer模型包括:编码器、解码器和全连接层,其中,编码器包括:两个多头稀疏注意力层,在第二个多头稀疏注意力层后连接一个前馈层,在每个多头稀疏注意力层和前馈层后均连接有残差网络和归一化处层,解码器包括:两个kan神经网络层,在每个kan神经网络层后均连接有残差网络和归一化层,在解码器后连接有全连接层。
4、可选地,将目标用户对应的平均绝对误差向量输入至熟练度评价体系中,得到目标用户对应的平均绝对误差向量的评级分数,包括:将目标平均绝对误差向量中的x值输入至输入量x的隶属设计中,得到目标平均绝对误差向量中的x值的隶属度;将目标平均绝对误差向量中的y值输入至输入量x的隶属设计中,得到目标平均绝对误差向量中的y值的隶属度;将目标平均绝对误差向量中的z值输入至输入量x的隶属设计中,得到目标平均绝对误差向量中的z值的隶属度;基于目标平均绝对误差向量中的x值的隶属度、y值的隶属度和z值的隶属度,确定目标平均绝对误差向量的对应的评级分数。
5、可选地,基于目标平均绝对误差向量中的x值的隶属度、y值的隶属度和z值的隶属度,确定目标平均绝对误差向量的对应的评级分数,包括:将目标平均绝对误差向量中的x值的隶属度、y值的隶属度和z值的隶属度进行模糊推理和去模糊化,得到目标平均绝对误差向量的对应的评级分数。
6、可选地,基于目标用户对应的平均绝对误差向量的评级分数,确定目标用户的属性信息,包括:将目标平均绝对误差向量的对应的评级分数输入至输出量score的隶属设计中,得到目标用户的属性信息。
7、本发明的有益效果:
8、本发明提出了一种基于kan-transformer和模糊推理的人机交互行为评价方法,首先设计了kan-transformer(kolmogorov arnold network,简称为kan)网络框架,通过专家用户控制手控器时产生的多个采样数据对kan-transformer网络进行训练,得到训练好的kan-transformer网络;获取目标用户的采集数据,将目标用户的采集数据构成第一轨迹曲线,将目标用户的采集数据中部分采集数据输入至训练好的kan-transformer模型中,预测目标用户的采集数据的第二轨迹曲线,第一轨迹曲线和第二轨迹曲线相对应,且第一轨迹曲线和第二轨迹曲线均处于三维空间中;根据第一轨迹曲线和第二轨迹曲线,得到目标用户对应的平均绝对误差向量,设计了熟练度体系框架,对目标用户对应的平均绝对误差向量进行处理,确定目标用户的属性信息;解决了现有技术中在遥操作任务中,无法确定目标用户的行为的熟练程度的技术问题,达到了通过提出的kan-transformer网络框架目标用户的行为轨迹进行预测,根据目标用户行为的真实轨迹和预测轨迹,得到目标用户的平均绝对误差向量,设计了熟练度体系框架,对平均绝对误差向量进行处理,得到目标用户行为的熟练程度的技术效果。
技术特征:
1.一种基于kan-transformer和模糊推理的人机交互行为评价方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,预构建的kan-transformer模型包括:编码器、解码器和全连接层,其中,编码器包括:两个多头稀疏注意力层,在第二个多头稀疏注意力层后连接一个前馈层,在每个多头稀疏注意力层和前馈层后均连接有残差网络和归一化处层,解码器包括:两个kan神经网络层,在每个kan神经网络层后均连接有残差网络和归一化层,在解码器后连接有全连接层。
3.根据权利要求1所述的方法,其特征在于,将目标用户对应的平均绝对误差向量输入至熟练度评价体系中,得到目标用户对应的平均绝对误差向量的评级分数,包括:
4.根据权利要求3所述的方法,其特征在于,基于目标平均绝对误差向量中的x值的隶属度、y值的隶属度和z值的隶属度,确定目标平均绝对误差向量的对应的评级分数,包括:
5.根据权利要求1所述的方法,其特征在于,基于目标用户对应的平均绝对误差向量的评级分数,确定目标用户的属性信息,包括:
6.一种处理器,其特征在于,所述处理器用于运行程序,其中,所述程序运行时执行权利要求1至5中任意一项所述的方法。
7.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行权利要求1至5中任意一项所述的方法。
技术总结
本发明公开了一种基于KAN‑Transformer和模糊推理的人机交互行为评价方法。其中,该方法包括:采集专家用户的多个采样数据,其中,专家用户的多个采样数据为专家用户控制手控器时产生的数据;通过专家用户的多个采样数据对预构建的KAN‑Transformer模型中进行训练,获得训练好的KAN‑Transformer模型;获取目标用户的采集数据,将目标用户的采集数据构成第一轨迹曲线,其中,目标用户的采集数据为目标用户控制手控器时产生的数据;将目标用户的采集数据中部分采集数据输入至训练好的KAN‑Transformer模型中,预测目标用户的采集数据的第二轨迹曲线。本发明解决了现有技术中在遥操作任务中,无法确定目标用户的行为的熟练程度的技术问题。
技术研发人员:马志强,李文娟,郭瑶瑶,黄攀峰,刘正雄
受保护的技术使用者:西北工业大学
技术研发日:
技术公布日:2024/12/2
- 还没有人留言评论。精彩留言会获得点赞!