一种车辆yawrate的估算方法与流程
本发明涉及一种计算方法,具体涉及一种车辆yawrate的估算方法,属于电子控制。
背景技术:
1、在车辆运动控制中车辆yawrate(侧偏角速度)是指车辆绕垂直轴旋转的速度,它对于车辆的稳定性和操控性具有重要的影响,特别是对于电子稳定控制系统(以下简称esc),esc的性能在很大成都上取决于yawrate的估计的准确性。
2、车辆的yawrate一般通过车辆的轮速信息来进行估算,在理想情况下其等于车辆质心处的线速度除以车辆在转弯时的转弯半径,即车辆的yawrate受车速、车辆质量、转弯半径、车辆悬挂系统和轮胎特性影响,所以其计算无法使用理想情况下的公式来进行计算。
3、估算yawrate有两种代表性的传统方法:直接积分法和线性观测器法。直接积分法通过由于使用积分器,导致传感器中的噪声和偏移量会累积,误差会随着时间的推移而逐渐增大;线性观测器法只能在侧偏角较小的线性域中进行高精度的估计,但对于非线性区域估计精度则大大降低。
4、因此如何采用一种有效的方法来解决yawrate估算时积分误差大和非线性区域精度差的问题,来确保电子稳定控制系统的正常控制,保证车辆在极端情况下可以保持车身的稳定,保护乘客的生命安全至关重要。
技术实现思路
1、本发明正是针对现有技术中存在的技术问题,提供一种车辆yawrate的估算方法,该技术方案旨在利用较少的传感器数值,改善现有技术对于yawrate估算的精度,并减少积分的误差,以达到提高电子稳定控制系统的控制能力和精度。
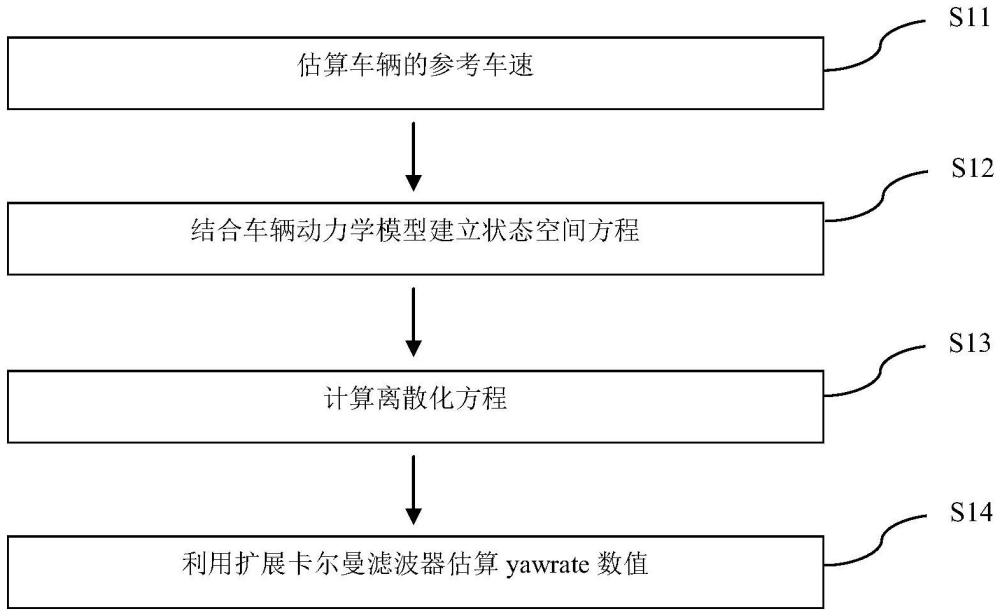
2、为了实现上述目的,本发明的技术方案如下,一种车辆yawrate的估算方法,所述方法包括以下步骤:
3、步骤s11:估算车辆的参考车速,
4、步骤s12:结合车辆动力学模型建立状态空间方程,
5、步骤s13:将s12的状态空间方程采用后向欧拉法进行离散化,
6、步骤s14:利用扩展卡尔曼滤波器估算yawrate的数值。
7、其中,步骤s11:计算车辆的参考车速,参考车速计算还包括:在车辆轮速有效时判断车辆是否有侧滑产生,计算车轮的加减速度,约束车速的上升和下降速率。
8、其中,步骤s12:结合车辆动力学模型建立状态空间方程,具体如下:
9、其中,所述车辆动力学模型为:
10、
11、其中β为侧偏角,为横摆角速度,m为车辆质量,1为车辆轴距,lr为后轴负载占比和轴距的乘积,lf为后轴负载占比和轴距的乘积,v为车速,ch为常量,
12、其中:所述的状态空间方程为:
13、
14、
15、其中
16、
17、
18、
19、其中m为车辆质量,cf为前轮侧偏刚度,cr为后轮侧偏刚度,δ为前轮操作角,i为车辆重心转动惯量,lf为车辆重心与前轮接地点的距离,lr为车辆重心与后轮接地点的距离。
20、其中,所述步骤s13:将s12的状态空间方程采用后向欧拉法进行离散化,
21、其中的后向欧拉法为采用k+1时刻的值xk+1来将微分方程:对其在时间t至t+dt内进行积分,其中为微分方程状态变量的一阶导数,x为微分方程的状态变量,u为微分方程的系统输入。
22、
23、其中,所述步骤s14:利用扩展卡尔曼滤波器估算yawrate的数值,其中,在扩展卡尔曼滤波器中,将基于横摆角速度传感器采集的yawrate作为主要量,基于轮速估算的yawrate作为辅助量,以得到更加准确的yawrate。
24、其中,步骤s11:估算车辆的参考车速,具体如下:
25、步骤s11-01:判断轮速传感器信号是否有效,当无效时则执行步骤s11-06,使用上一次有效的参考车速数值,当有效时则在步骤s11-02:判断车轮侧滑状态;随后在步骤s11-03:根据轮速传感器信号计算出此时刻的车轮端的加速度;根据计算的车轮端加速度,步骤s11-04:需要估算车速的上升或下降速率;随后在步骤s11-05中结合g值传感器数值、车轮侧滑状态来估算出参考车速,其中在步骤s11-05中会依据车辆四个的轮速传感器数值估算出车辆四个车轮的参考车速,左前和右前参考车速求均值whspdfrl,左后和右后参考车速求均值whspdrrl,最终车辆的参考车速为所述步骤s14中,卡尔曼滤波器算法可以划分为两个部分:时间更新和测量更新,完整流程如图3所示。其中为初始状态估计,p[0]为初始状态估计误差协方差矩阵,为先验状态估计,为先验状态估计误差协方差矩阵,k[k]为卡尔曼增益,为后验状态估计,z[k]为n×1观测向量,hm为n×n观测矩阵,rc为测量噪声协方差矩阵,qc为过程噪声协方差矩阵。
26、相对于现有技术,本发明具有如下优点,在使用车辆轮速传感器和横摆角速度传感器数据下使用车辆动力学模型及卡尔曼滤波器来提高yawrate的估算精度,通过车辆动力学模型结合传感器数值可以模拟出真实的车辆的运动状态,但环境的扰动及传感器测量误差会对车辆模型产生较大干扰,再利用卡尔曼滤波器将多个传感器的数据进行融合,利用概率论和线性系统理论对状态进行估计和预测,从而有效解决了环境的扰动及传感器测量误差带来的影响。
技术特征:
1.一种车辆yawrate的估算方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的车辆yawrate的计算方法,其特征在于,步骤s11:计算车辆的参考车速,参考车速计算还包括:在车辆轮速有效时判断车辆是否有侧滑产生,计算车轮的加减速度,约束车速的上升和下降速率。
3.根据权利要求2所述的车辆yawrate的估算方法,其特征在于,步骤s12:结合车辆动力学模型建立状态空间方程,具体如下:
4.根据权利要求3所述的车辆yawrate的估算方法,其特征在于,所述步骤s13:将s12的状态空间方程采用后向欧拉法进行离散化,其中的后向欧拉法为采用k+1时刻的值xk+1来将微分方程:对其在时间t至t+dt内进行积分,其中为微分方程状态变量的一阶导数,x为微分方程的状态变量,u为微分方程的系统输入。
5.根据权利要求2所述的车辆yawrate的估算方法,其特征在于,所述步骤s14:利用扩展卡尔曼滤波器估算yawrate的数值,其中,在扩展卡尔曼滤波器中,将基于横摆角速度传感器采集的yawrate作为主要量,基于轮速计算的yawrate作为辅助量,以得到更加准确的yawrate。
6.根据权利要求2所述的车辆yawrate的估算方法,其特征在于,
7.根据权利要求5所述的车辆yawrate的估算方法,其特征在于,所述步骤s14中卡尔曼滤波器算法划分为两个部分:时间更新和测量更新。
技术总结
本发明涉及一种车辆yawrate的估算方法,所述方法包括以下步骤:步骤S11:计算车辆的参考车速,步骤S12:结合车辆动力学模型建立状态空间方程,步骤S13:将S12的状态空间方程采用后向欧拉法进行离散化,步骤S14:利用扩展卡尔曼滤波器估算yawrate的数值。该技术方案利用较少的传感器数值,改善现有技术对于yawrate计算的精度,并减少积分的误差,以达到提高电子稳定控制系统的控制能力和精度。
技术研发人员:胡勤耕,张明,王伟
受保护的技术使用者:长安马自达汽车有限公司
技术研发日:
技术公布日:2024/11/14
- 还没有人留言评论。精彩留言会获得点赞!