一种智能办会机器人服务的实现方法和系统与流程
本发明属于计算机软件工程,尤其涉及一种智能办会机器人服务的实现方法和系统。
背景技术:
1、近年来,在信息安全上升到国家战略背景情况下,以安全为基石的智能化会议应用的时代已经全面到来,办会作为会议应用的第一步,是必不可少的关键功能。伴随着人工智能技术和人机交互技术的快速发展,办会流程也呈现出多种交互方式,从传统的网页点击和文字输入,逐步演变成更为方便的语音交互。
2、传统的会议应用中,办会人员需要通过鼠标、键盘或屏幕触控等方式与计算机终端进行交互,按照规范的格式输入会议信息到计算机,一步步地完成办会流程。如果输入的信息不规范,系统将通过文字提示用户修改,并引导用户使用正确的格式来输入。然而使用传统的网页输入方式存在诸多不便。操作人员需要对会议应用有一定的了解,并且要把意图转化为机器可识别的格式,产品存在一定的不便利性。此外,如果系统比较复杂,面对各种场景还需要对操作人员进行培训,阅读操作手册的篇幅也会增多,增加了人员的学习成本。
3、在国产化要求越来越普及的趋势下,如何在国产化环境中提供稳定的智能办会机器人服务就成了一个亟待解决的问题。由于在国产龙芯平台下,基于机器学习和自然语言处理的rasa框架缺少部分nlu组件库,为此本发明提出一种智能办会机器人服务的实现方法和系统。
技术实现思路
1、本发明的目的在于提供一种智能办会机器人服务的实现方法和系统,旨在解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种智能办会机器人服务的实现方法,包括以下步骤:
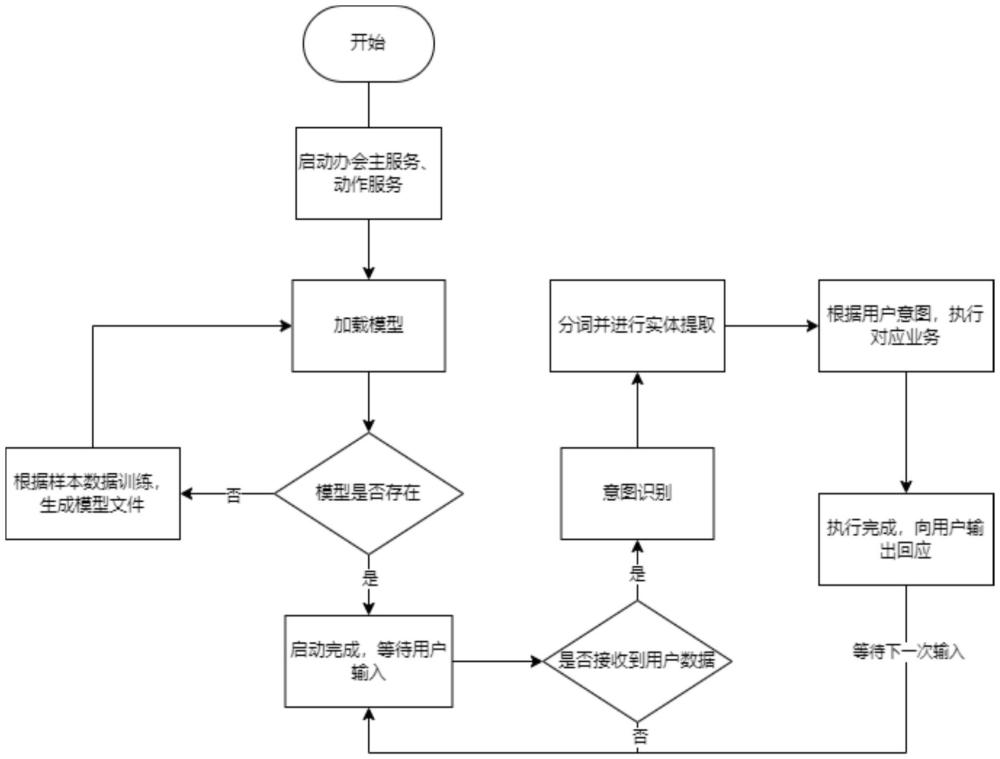
4、在服务器开机时通过便捷化脚本自动启动服务端程序,便捷化脚本通过延迟时间设置,使用nohup命令记录服务端程序的详细启动日志;脚本执行后,同时运行主服务和动作服务;所述主服务与外部通信,通过websocket连接远程会议系统,实时显示并同步用户信息;
5、在主服务运行成功后,根据pipeline配置启动多个依赖组件,并设置组件在5005端口运行以接收符合格式的文字、音频数据;动作服务运行成功后,在5055端口运行;
6、在主服务接收到用户数据后,按照设定的pipeline顺序解析数据;
7、在主服务完成数据解析后,将识别的意图和实体传输给动作服务,动作服务根据接收到的意图和实体执行相应python代码,调用远程会议系统api完成实际动作,并将操作结果返回给主服务;主服务根据动作服务的返回结果,生成并输出相应的文字信息给用户。
8、进一步的,所述多个依赖组件包括意图识别组件、分词组件和特征提取组件。
9、进一步的,所述主服务和动作服务之间通过http协议进行通讯。
10、进一步的,所述按照设定的pipeline顺序解析数据步骤的具体过程为:
11、首先利用意图识别组件进行意图识别,找到与用户数据相似度最高的意图,然后再利用分词组件和特征提取组件进行分词和特征提取,提取关键实体信息。
12、进一步的,若所述动作服务执行相应代码时缺少必要信息,动作服务将通知主服务去向用户问询相关信息,并提供可供选择的列表。
13、一种智能办会机器人服务的实现系统,包括:
14、启动管理模块,用于在服务器开机时通过便捷化脚本自动启动服务端程序,便捷化脚本通过延迟时间设置,使用nohup命令记录服务端程序的详细启动日志;脚本执行后,同时运行主服务和动作服务;所述主服务与外部通信,通过websocket连接远程会议系统,实时显示并同步用户信息;
15、服务端口配置模块,用于在主服务运行成功后,根据pipeline配置启动多个依赖组件,并设置组件在5005端口运行以接收符合格式的文字、音频数据;动作服务运行成功后,在5055端口运行;
16、数据解析模块,用于在主服务接收到用户数据后,按照设定的pipeline顺序解析数据;
17、意图执行与结果反馈模块,用于在主服务完成数据解析后,将识别的意图和实体传输给动作服务,动作服务根据接收到的意图和实体执行相应python代码,调用远程会议系统api完成实际动作,并将操作结果返回给主服务;主服务根据动作服务的返回结果,生成并输出相应的文字信息给用户。
18、进一步的,所述系统的配置储存在配置文件中,所述配置文件包括基础配置和训练样本配置两部分;基础配置用于设置组件使用的意图识别器和分类器、系统的输入输出配置,以及支持第三方业务系统适配;训练样本配置包括nlu数据、规则数据和故事数据三种样本数据,nlu数据样本用于主服务提取出意图和实体,以及对话管理所需的规则和故事数据。
19、与现有技术相比,本发明的有益效果是:
20、1、本发明使用便捷且学习成本低,用户只需和对话机器人对话交流即可完成办会,这一方式与传统网页点击输入的方式形成互补,增加了办会流程中人机交互的多样性。
21、2、本发明利用rasa组件的高内聚与低耦合特性,将国产飞腾cpu支持的自然语言理解(nlu)组件接入到系统,使其能在国产化环境下稳定运行。并且利用rasa框架的预训练功能,启动服务时只需加载已经训练好的模型,大大节约了部署时间。
22、3、本发明创建了一个高度优化和可靠的软件版本。采用rasa作为软件搭建框架,通过使用docker技术将依赖的python环境和python库打包成镜像,使其在相同架构的客户环境下能够直接运行,而无需进行额外的配置或修改。这一特性显著提高了整体的易用性,使得用户能够轻松地使用和享受本发明的各种功能和优势。
技术特征:
1.一种智能办会机器人服务的实现方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的智能办会机器人服务的实现方法,其特征在于,所述多个依赖组件包括意图识别组件、分词组件和特征提取组件。
3.根据权利要求1所述的智能办会机器人服务的实现方法,其特征在于,所述主服务和动作服务之间通过http协议进行通讯。
4.根据权利要求1所述的智能办会机器人服务的实现方法,其特征在于,所述按照设定的pipeline顺序解析数据步骤的具体过程为:
5.根据权利要求1所述的智能办会机器人服务的实现方法,其特征在于,若所述动作服务执行相应代码时缺少必要信息,动作服务将通知主服务去向用户问询相关信息,并提供可供选择的列表。
6.一种智能办会机器人服务的实现系统,其特征在于,包括:
7.根据权利要求6所述的智能办会机器人服务的实现系统,其特征在于,所述系统的配置储存在配置文件中,所述配置文件包括基础配置和训练样本配置两部分;基础配置用于设置组件使用的意图识别器和分类器、系统的输入输出配置,以及支持第三方业务系统适配;训练样本配置包括nlu数据、规则数据和故事数据三种样本数据,nlu数据样本用于主服务提取出意图和实体,以及对话管理所需的规则和故事数据。
技术总结
本发明适用于计算机软件工程技术领域,提供了一种智能办会机器人服务的实现方法和系统。本发明使用便捷且学习成本低,用户只需与对话机器人的交流即可完成办会,这与传统网页点击输入的方式形成互补,丰富了人机交互方式;系统利用Rasa组件的高内聚与低耦合特性,并结合国产飞腾CPU支持的NLU组件,确保在国产化环境下稳定运行;Rasa框架的预训练功能使得启动服务时只需加载已经训练好的模型,节约了部署时间;此外,通过Docker技术将Python环境和Python库打包成镜像,使其在相同架构的客户环境下无需进行额外的配置或修改即可运行,提高了整体的易用性,使得用户能够轻松地使用和享受本发明的各种功能和优势。
技术研发人员:刘广彬,尹怡哲,罗梓桂,曹斌,石丹
受保护的技术使用者:江苏航天龙梦信息技术有限公司
技术研发日:
技术公布日:2024/10/24
- 还没有人留言评论。精彩留言会获得点赞!