一种适用于复杂森林环境的无人机可见光影像单木检测方法与流程
本发明属于林业科学研究中的森林资源监测,涉及一种适用于复杂森林环境的无人机可见光影像单木检测方法。
背景技术:
1、人工林是全球森林资源重要组成,占全球森林面积的7%(约2.94亿公顷),承载能源供应、气候调节、防风固沙、碳固存等多重生态调节服务功能。单木是森林生态系统基本单元,深刻影响着系统结构、格局、质量、功能。精准感知单木要素(如单木位置、密度、空间格局等)能够为森林资源监测与管理、森林质量精准提升、森林资源利用、保护与可持续发展提供重要技术支撑。现有的单木调查方式主要包含实地、卫星、无人机等观测平台,通过主被动传感器(可见光、多光谱、高光谱、激光点云等),基于数据的纹理、光谱、空间等特征与分类器的融合,开展单木的分割辨识。实地调查方法能够提供精细数据,但费时费力,成本昂贵,局限于样地、林分尺度观测。卫星观测平台能够实现大尺度观测,但数据分辨率与准确性面临挑战,适用于单木稀疏分布的城市、苗圃等场景。无人机可见光影像可高效、低成本、大面积获取高分辨率数据,实现高精度单木检测。同时,高效、低成本、精细、精准的大范围调查手段成为趋势。
2、在基于图像的单木检测技术方面,主要包含规则驱动和数据驱动两类方法。规则驱动的单木检测方法,例如局部最大值法、分水岭分割等,通过数据的纹理、光谱等特征,按照一定的规则进行单木的检测,但存在深度表征信息利用有限,需要根据不同的场景重新调整参数等制约。而基于数据驱动的方法,能够自动学习提取复杂抽象特征,具有对不同数据分布和场景变化的强适应性,能够实现单木的精准智能检测,包括faster r-cnn、yol0系列等。以yol0模型为代表的单阶段模型可实现高效、精准检测,成为主流解决方案。目前深度学习yol0v5目标检测模型在低密度、均匀分布的人工林场景表现优异,而在高密度、树冠遮挡、复杂背景场景中仍存在挑战;以往单木检测研究主要集中在规则、同质化人工林环境,缺乏同时对多个复杂人工林场景考虑。
技术实现思路
1、本发明针对现有技术问题,提供一种适用于复杂森林环境的无人机可见光影像单木检测方法,基于无人机可见光影像和改进yol0v5模型,创建了面向复杂森林场景的单木精准检测技术,在包含稠密、树冠重叠、混淆背景等多种复杂场景上实现了单木高效、精准、智能检测。
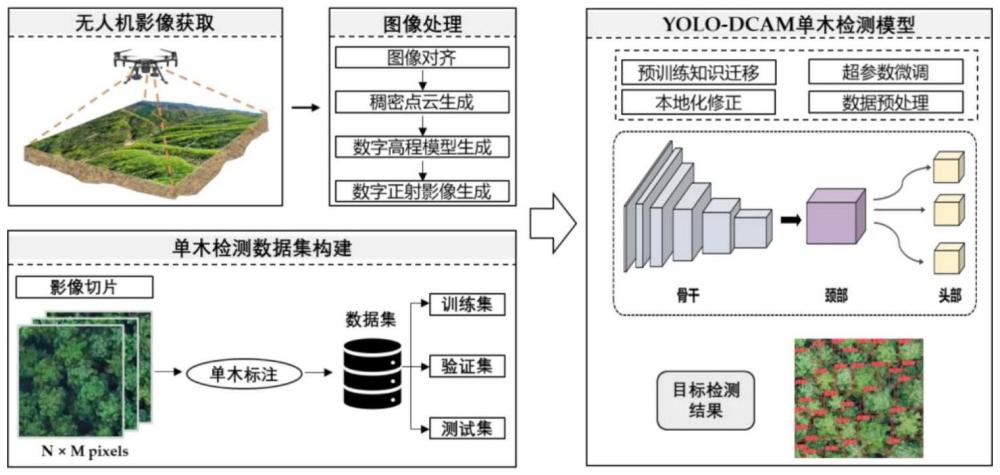
2、一种适用于复杂森林环境的无人机可见光影像单木检测方法,含有以下步骤:基于无人机观测平台与可见光传感器,在单木检测区域内进行森林上冠层的可见光影像采集,并进行包括图像对齐、稠密点云生成步骤的图像处理生成森林数字正射影像图,对森林数字正射影像数据进行切片处理,生成n×m像素大小的图像块,并使用目标检测实例标注工具进行单木树冠的实例标注,将所有树冠标注以后,实现单木检测数据集的构建,数据集包括训练、验证、测试3个组成部分,使用公开数据集训练得到的预训练权重进行yol0-dcam单木检测模型的预训练知识迁移,并根据训练集数据进行模型权重的本地化修正,基于验证集数据进行模型训练性能的验证反馈,进行超参数微调,训练得到最优化模型权重,传入图像数据进行单木检测推理。
3、本发明的优点是:提出的面向复杂森林场景的改进yol0-dcam模型单木检测的方法合理有效,yolo-dcam模型在骨干网络中融合了可变形卷积,将可学习的偏移变量整合到卷积核采样点,实现对不同目标形状和大小的树冠自适应性,增强骨干网络对细粒度和高级语义特征提取能力;在颈部网络中,融合不同尺度上下文信息与跨空间学习并行化卷积核,高效捕获短期和长期依赖关系,有效提升对树冠目标信息关注,抑制冗余背景信息干扰。本发明有效增强单木检测模型特征提取能力,提升对目标信息的注意力,在模型精度、大小、检测速率之间取得较好平衡,在复杂森林环境下单木检测性能有效提升,precision(96.1%)、recall(93.0%)、f1-score(94.5%)和ap@0.5(97.3%)。与yolov7、yolov8、rt-dert-i等最先进的检测模型相比,本发明模型取得最好检测性能,同时有效平衡了模型大小与检测速率。与基准模型yolov5相比,precision提高2.6%,recall提高1.6%,f1-score提高2.1%,ap@0.5提高1.4%,模型大小为14.8mb,fps值为53,能够实现轻量级实时精准检测,各项性能满足满足基层林业调查需求,本发明可以作为一种面向复杂森林环境的高效、精准、强适应性的单木检测解决方案,服务于林业监测、经营、保护等各项业务,为现代林业高质量发展提供技术支持。
技术特征:
1.一种适用于复杂森林环境的无人机可见光影像单木检测方法,其特征在于,含有以下步骤:基于无人机观测平台与可见光传感器,在单木检测区域内进行森林上冠层的可见光影像采集,并进行包括图像对齐、稠密点云生成步骤的图像处理生成森林数字正射影像图,对森林数字正射影像数据进行切片处理,生成n×m像素大小的图像块,使用目标检测实例标注工具进行单木树冠的实例标注,将所有树冠标注以后,实现单木检测数据集的构建,数据集包括训练、验证、测试3个组成部分,使用公开数据集训练得到的预训练权重进行yolo-dcam单木检测模型的预训练知识迁移,根据训练集数据进行模型权重的本地化修正,基于验证集数据进行模型训练性能的验证反馈,进行超参数微调,训练得到最优化模型权重,传入图像数据进行单木检测推理。
2.根据权利要求1所述的一种适用于复杂森林环境的无人机可见光影像单木检测方法,其特征在于,含有以下步骤:
3.根据权利要求2所述的一种适用于复杂森林环境的无人机可见光影像单木检测方法,其特征在于,步骤1.1)数据获取与处理,含有以下步骤:
4.根据权利要求2所述的一种适用于复杂森林环境的无人机可见光影像单木检测方法,其特征在于,步骤2.1)模型概述,包括以下步骤:
5.根据权利要求2所述的一种适用于复杂森林环境的无人机可见光影像单木检测方法,其特征在于,
6.根据权利要求2所述的一种适用于复杂森林环境的无人机可见光影像单木检测方法,其特征在于,步骤2.3)基于yolo-dcam模型的单木检测,含有以下步骤:
技术总结
一种适用于复杂森林环境的无人机可见光影像单木检测方法,属于林业科学研究中的森林资源监测技术领域。基于无人机观测平台与可见光传感器,在单木检测区域内进行森林上冠层的可见光影像采集,并进行包括图像对齐、稠密点云生成步骤的图像处理生成森林数字正射影像图,对森林数字正射影像数据进行切片处理,生成N×M像素大小的图像块,并使用目标检测实例标注工具进行单木树冠的实例标注,将所有树冠标注以后,实现单木检测数据集的构建,根据训练集数据进行模型权重的本地化修正,基于验证集数据进行模型训练性能的验证反馈,进行超参数微调,训练得到最优化模型权重,传入图像数据进行单木检测推理。
技术研发人员:张怀清,王建森,邱汉清,陈艳,杨廷栋,刘洋
受保护的技术使用者:中国林业科学研究院资源信息研究所
技术研发日:
技术公布日:2024/11/11
- 还没有人留言评论。精彩留言会获得点赞!