车辆跨位停放的识别方法、装置、计算机设备和存储介质与流程
本申请涉及图像处理,特别是涉及车辆跨位停放的识别方法、装置、计算机设备和存储介质。
背景技术:
1、随着计算机视觉算法的快速发展与应用,计算机视觉算法广泛用于车位管理方案中;而车辆跨位停放的识别结果的精度作为车位管理方案的关键衡量指标之一,它的优劣将直接影响到人们的出行体验。
2、目前的方案为:通过地磁传感器监控待检车位区域内的地磁磁力参数变化,并生成相应的驱动信号发送至微波检测装置,微波检测装置根据接收到的驱动信号发射某频段的微波信号及接收回波信号。根据回波信号、待检测车位的基准回波数据及设定微波变化阈值三者之间的数量关系,判别待检测车位的车位状态。但是该方案无法精确识别车辆是否跨位停放。
3、针对相关技术中无法精确识别车辆是否跨位停放的问题,目前还没有提出有效的解决方案。
技术实现思路
1、在本实施例中提供了一种车辆跨位停放的识别方法、装置、计算机设备和存储介质,以解决相关技术中无法精确识别车辆是否跨位停放的问题。
2、第一个方面,在本实施例中提供了一种车辆跨位停放的识别方法,包括:
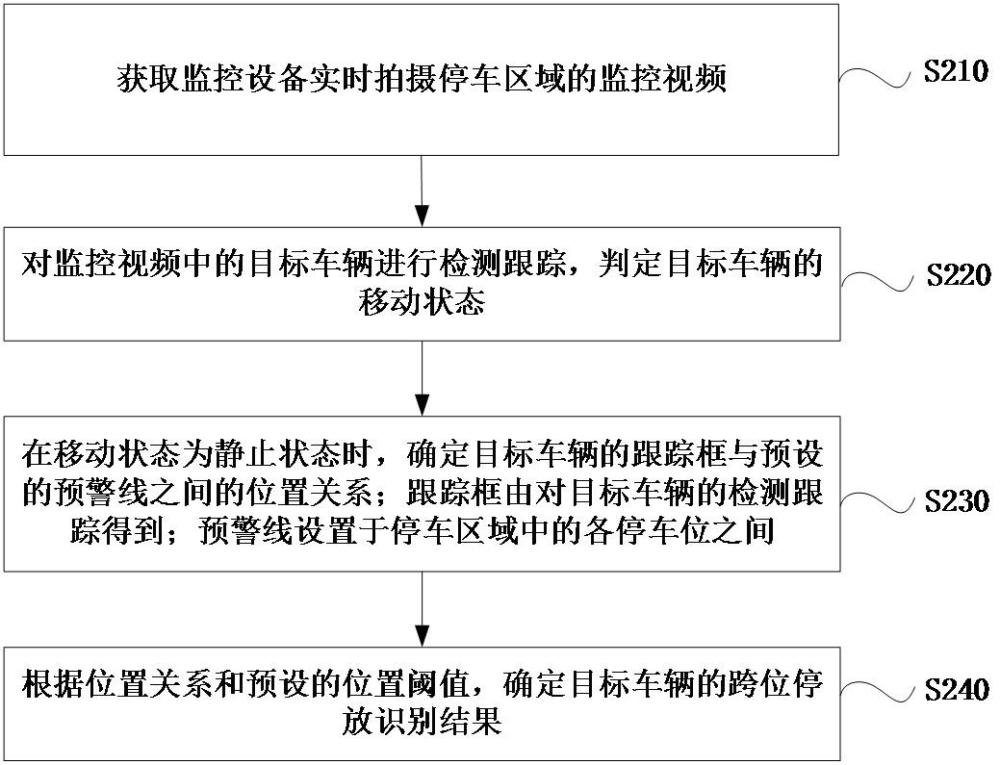
3、获取监控设备实时拍摄停车区域的监控视频;
4、对所述监控视频中的目标车辆进行检测跟踪,判定所述目标车辆的移动状态;
5、在所述移动状态为静止状态时,确定所述目标车辆的跟踪框与预设的预警线之间的位置关系;所述跟踪框由对所述目标车辆的检测跟踪得到;所述预警线设置于所述停车区域中的各停车位之间;
6、根据所述位置关系和预设的位置阈值,确定所述目标车辆的跨位停放识别结果。
7、在其中的一些实施例中,基于融合的单极映射法和欧式距离度量法,确定所述目标车辆的跟踪框与预设的预警线之间的位置关系,包括:
8、将所述目标车辆的所述跟踪框和所述预警线映射到统一坐标系下进行比对;
9、若所述跟踪框与所述预警线为相交状态,则确定所述跟踪框与所述预警线的交点坐标;并基于所述交点坐标确定所述跟踪框与所述预警线的包吞比系数;将所述包吞比系数作为位置关系。
10、在其中的一些实施例中,所述方法还包括:
11、其中的一些实施例中,所述方法还包括:
12、配置与所述停车区域中停车位数量对应的车位链表;所述车位链表中每个第一节点的挂载信息包括泊位占用状态标志位、关联车辆身份信息、跨位停放信息、车辆姿态信息以及车牌识别结果;所述第一节点的所述挂载信息对应所述停车位的状态属性信息;
13、基于所述车位链表,对所述停车区域中所述停车位进行管理。
14、其中的一些实施例中,所述方法还包括:
15、基于预设的上报触发帧数,对所述车位链表进行上报;
16、基于上报的所述车位链表,将所述停车区域中所述停车位的所述状态属性信息进行展示。
17、在其中的一些实施例中,对所述监控视频中的目标车辆进行检测跟踪,判定所述目标车辆的移动状态,包括:
18、将所述监控视频输入到训练完备的深度学习网络模型中进行所述目标车辆的检测,得到检测框和对应的属性信息;所述属性信息包括检测框坐标和第一类别;
19、根据所述检测框、对应的所述属性信息以及预设的跟踪链表,实时对所述监控视频中的所述目标车辆进行跟踪,得到跟踪框;所述跟踪链表中的每个第二节点的挂载信息包括跟踪框坐标、第二类别以及目标车辆身份信息;
20、在预设的判稳识别帧数内,根据所述跟踪框的运动位移和预设的位移阈值,确定所述目标车辆的移动状态;所述判稳识别帧数与所述监控视频的当前视频帧率相关。
21、在其中的一些实施例中,根据所述检测框、对应的所述属性信息以及预设的跟踪链表,实时对所述监控视频中的所述目标车辆进行跟踪,得到跟踪框,包括;
22、基于对角距离与矩形iou交并比加权融合的度量法,将所述属性信息与所述跟踪链表中的所述第二节点进行关联匹配;
23、若关联匹配失败,则将所述检测框对应的车辆作为新的所述目标车辆,并将所述检测框作为新的所述跟踪框;将所述属性信息更新到所述跟踪链表中,并分配对应的跟踪身份信息;
24、若关联匹配成功,则基于所述属性信息,更新所述跟踪链表中相应的所述第二节点,确定对应的所述跟踪框。
25、在其中的一些实施例中,所述方法还包括:
26、基于所述属性信息,将连续帧下的所述目标车辆的车辆姿态存储到车位链表中的车辆姿态数组;
27、根据所述姿态数组与预设的帧数,确定车位链表中的车辆姿态信息。
28、在其中的一些实施例中,所述方法还包括:
29、轮询确定车位状态识别区域与所述跟踪框的涵盖比例系数;所述车位状态识别区域为所述停车区域中每个所述停车位中的指定区域;
30、根据所述涵盖比例系数和预设的比例阈值,确定车位链表中的泊位占用状态标志位。
31、第二个方面,在本实施例中提供了一种车辆跨位停放的识别装置,包括:获取模块、检测跟踪模块、处理模块以及跨位停放识别模块;
32、所述获取模块,用于获取监控设备实时拍摄停车区域的监控视频;
33、所述检测跟踪模块,用于对所述监控视频中的目标车辆进行检测跟踪,判定所述目标车辆的移动状态;
34、所述处理模块,用于在所述移动状态为静止状态时,确定所述目标车辆的跟踪框与预设的预警线之间的位置关系;所述跟踪框由对所述目标车辆的检测跟踪得到;所述预警线设置于所述停车区域中的各停车位之间;
35、所述跨位停放识别模块,用于根据所述位置关系和预设的位置阈值,确定所述目标车辆的跨位停放识别结果。
36、第三个方面,在本实施例中提供了一种计算机设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一个方面所述的车辆跨位停放的识别方法。
37、第四个方面,在本实施例中提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一个方面所述的车辆跨位停放的识别方法。
38、与相关技术相比,在本实施例中提供的车辆跨位停放的识别方法、装置、计算机设备和存储介质,通过获取监控设备实时拍摄停车区域的监控视频;对监控视频中的目标车辆进行检测跟踪,判定目标车辆的移动状态;在移动状态为静止状态时,确定目标车辆的跟踪框与预设的预警线之间的位置关系;跟踪框由对目标车辆的检测跟踪得到;预警线设置于停车区域中的各停车位之间;根据位置关系和预设的位置阈值,确定目标车辆的跨位停放识别结果,解决了相关技术中无法精确识别车辆是否跨位停放的问题,利用目标车辆的跟踪框与预设的预警线之间的位置关系结合预设的位置阈值来精确识别车辆是否跨位停放,具有抗干扰能力强的特点。
39、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:
1.一种车辆跨位停放的识别方法,其特征在于,包括:
2.根据权利要求1所述的车辆跨位停放的识别方法,其特征在于,基于融合的单极映射法和欧式距离度量法,确定所述目标车辆的跟踪框与预设的预警线之间的位置关系,包括:
3.根据权利要求1所述的车辆跨位停放的识别方法,其特征在于,所述方法还包括:
4.根据权利要求3所述的车辆跨位停放的识别方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的车辆跨位停放的识别方法,其特征在于,对所述监控视频中的目标车辆进行检测跟踪,判定所述目标车辆的移动状态,包括:
6.根据权利要求5所述的车辆跨位停放的识别方法,其特征在于,根据所述检测框、对应的所述属性信息以及预设的跟踪链表,实时对所述监控视频中的所述目标车辆进行跟踪,得到跟踪框,包括;
7.根据权利要求5所述的车辆跨位停放的识别方法,其特征在于,所述方法还包括:
8.根据权利要求1所述的车辆跨位停放的识别方法,其特征在于,所述方法还包括:
9.一种车辆跨位停放的识别装置,其特征在于,包括:获取模块、检测跟踪模块、处理模块以及跨位停放识别模块;
10.一种计算机设备,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行权利要求1至权利要求8中任一项所述的车辆跨位停放的识别方法的步骤。
11.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至权利要求8中任一项所述的车辆跨位停放的识别方法的步骤。
技术总结
本申请涉及一种车辆跨位停放的识别方法、装置、计算机设备和存储介质,其中,该方法包括:获取监控设备实时拍摄停车区域的监控视频;对监控视频中的目标车辆进行检测跟踪,判定目标车辆的移动状态;在移动状态为静止状态时,确定目标车辆的跟踪框与预设的预警线之间的位置关系;跟踪框由对目标车辆的检测跟踪得到;预警线设置于停车区域中的各停车位之间;根据位置关系和预设的位置阈值,确定目标车辆的跨位停放识别结果。通过本申请,解决了相关技术中无法精确识别车辆是否跨位停放的问题,利用目标车辆的跟踪框与预设的预警线之间的位置关系结合预设的位置阈值来精确识别车辆是否跨位停放,具有抗干扰能力强的特点。
技术研发人员:郝行猛,施夏梦,谢鑫鑫,王亚运,舒梅,段富治
受保护的技术使用者:浙江大华技术股份有限公司
技术研发日:
技术公布日:2024/9/5
- 还没有人留言评论。精彩留言会获得点赞!