直升机鱼叉功能模拟方法、装置、电子设备及存储介质与流程
本发明涉及航空,尤其涉及一种直升机鱼叉功能模拟方法、装置、电子设备及存储介质。
背景技术:
1、对于直升机着舰模拟设备,由于中小型舰船在移动时受风浪影响较大,会导致横摇、纵摇和升沉幅度较大,此时处于尾部的舰船飞行甲板也处于更大的起伏晃动的状态,再附加上由舰岛造成的扰动气流和海风的影响,为保障直升机着舰,鱼叉格栅装置是常用的着舰助降手段。
2、鱼叉格栅装置又称“着舰定位锁紧装置”,目前已被广泛应用于现代战舰中。鱼叉格栅装置的一部分是鱼叉,鱼叉的动力源主要包括气动、液压和电机三种来源;鱼叉的机械结构可划分为直升机机腹的鱼叉锁紧结构,鱼叉锁紧结构主要包括鱼叉收放作动筒、卡爪式锁钩和弹簧-活塞结构的撑杆等;另一部分是在舰船飞行甲板上的格栅,格栅为圆形区域,区域内成网栅状,有很多小孔。鱼叉的操纵由飞行员控制,鱼叉可伸出或者缩进,着舰时,直升机的机轮接触舰面后,飞行员操纵鱼叉伸出,鱼叉的锁钩与格栅啮合后立即锁定。
3、现有的关于直升机鱼叉功能模拟技术,提供了一种直升机鱼叉载荷计算方法,仅罗列了力平衡方程和力矩平衡方程,考虑了机轮摩擦力、鱼叉载荷和风载荷,现有的方法为静态力方程求解,仅用于鱼叉的静态分析,不能适用于直升机着舰模拟设备的实时仿真,导致鱼叉功能模拟效率低。
技术实现思路
1、本发明提供一种直升机鱼叉功能模拟方法、装置、电子设备及存储介质,用以解决不能适用于直升机着舰模拟设备的实时仿真,导致鱼叉功能模拟效率低的问题。
2、本发明提供一种直升机鱼叉功能模拟方法,包括:
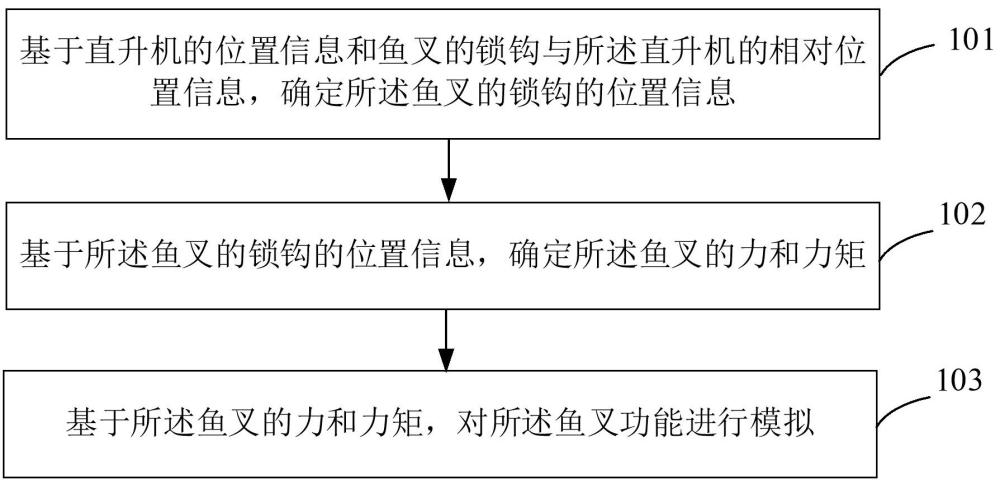
3、基于直升机的位置信息和鱼叉的锁钩与所述直升机的相对位置信息,确定所述鱼叉的锁钩的位置信息;
4、基于所述鱼叉的锁钩的位置信息,确定所述鱼叉的力和力矩;
5、基于所述鱼叉的力和力矩,对所述鱼叉功能进行模拟。
6、根据本发明提供的一种直升机鱼叉功能模拟方法,所述基于所述鱼叉的锁钩的位置信息,确定所述鱼叉的力和力矩,包括:
7、基于所述鱼叉的锁钩的位置信息,确定所述鱼叉的锁钩是否与舰船飞行甲板上的格栅锁住;
8、在确定所述鱼叉的锁钩与所述格栅锁住的情况下,基于所述鱼叉与所述格栅的相对位移和相对速度,确定所述鱼叉的力和力矩。
9、根据本发明提供的一种直升机鱼叉功能模拟方法,所述基于所述鱼叉的锁钩的位置信息,确定所述鱼叉的锁钩是否与舰船飞行甲板上的格栅锁住,包括:
10、基于所述鱼叉的锁钩的位置信息,确定所述鱼叉的锁钩与所述格栅的圆心之间的距离;
11、基于所述距离,判断所述鱼叉是否在格栅范围内;
12、在所述鱼叉在格栅范围内的情况下,基于所述鱼叉的锁钩的高度和所述格栅的高度,确定所述鱼叉的锁钩是否与所述舰船飞行甲板上的所述格栅锁住。
13、根据本发明提供的一种直升机鱼叉功能模拟方法,所述基于所述鱼叉的锁钩的高度和所述格栅的高度,确定所述鱼叉的锁钩是否与所述舰船飞行甲板上的所述格栅锁住,包括:
14、在所述鱼叉的锁钩的高度小于所述格栅的高度的情况下,确定所述鱼叉接触格栅的位置为所述鱼叉的锁住点位置,并基于所述锁住点位置确定所述鱼叉的锁钩与所述舰船飞行甲板上的所述格栅锁住;
15、在所述鱼叉的锁钩的高度不小于所述格栅的高度的情况下,确定所述鱼叉的锁钩与所述舰船飞行甲板上的所述格栅未锁住。
16、根据本发明提供的一种直升机鱼叉功能模拟方法,所述基于所述鱼叉与所述格栅的相对位移和相对速度,确定所述鱼叉的力和力矩,包括:
17、基于所述相对位移、所述相对速度、所述鱼叉的刚度系数和所述鱼叉的阻尼系数,确定所述鱼叉的力;
18、基于所述鱼叉的力和所述鱼叉与所述直升机重心之间的距离,确定所述鱼叉的力矩。
19、根据本发明提供的一种直升机鱼叉功能模拟方法,所述方法还包括:
20、将所述鱼叉的力和力矩耦合至所述直升机的力和力矩上;
21、基于耦合后的力和力矩,采用直升机动力学理论,确定所述直升机的目标信息;所述目标信息包括以下至少一项:位置、速度和姿态角。
22、本发明还提供一种直升机鱼叉功能模拟装置,包括:
23、第一确定模块,用于基于直升机的位置信息和鱼叉的锁钩与所述直升机的相对位置信息,确定所述鱼叉的锁钩的位置信息;
24、第二确定模块,用于基于所述鱼叉的锁钩的位置信息,确定所述鱼叉的力和力矩;
25、模拟模块,用于基于所述鱼叉的力和力矩,对所述鱼叉功能进行模拟。
26、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述直升机鱼叉功能模拟方法。
27、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述直升机鱼叉功能模拟方法。
28、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述直升机鱼叉功能模拟方法。
29、本发明提供的直升机鱼叉功能模拟方法、装置、电子设备及存储介质,通过基于直升机的位置信息和鱼叉的锁钩与所述直升机的相对位置信息,确定所述鱼叉的锁钩的位置信息;基于所述鱼叉的锁钩的位置信息,确定所述鱼叉的力和力矩;基于所述鱼叉的力和力矩,对所述鱼叉功能进行模拟。通过实时动态的位置信息,使得鱼叉的力和力矩的准确确定,进而准确对鱼叉功能进行模拟,提高了鱼叉功能模拟的可靠性,从而提升了鱼叉功能模拟的效率。
技术特征:
1.一种直升机鱼叉功能模拟方法,其特征在于,包括:
2.根据权利要求1所述的直升机鱼叉功能模拟方法,其特征在于,所述基于所述鱼叉的锁钩的位置信息,确定所述鱼叉的力和力矩,包括:
3.根据权利要求2所述的直升机鱼叉功能模拟方法,其特征在于,所述基于所述鱼叉的锁钩的位置信息,确定所述鱼叉的锁钩是否与舰船飞行甲板上的格栅锁住,包括:
4.根据权利要求3所述的直升机鱼叉功能模拟方法,其特征在于,所述基于所述鱼叉的锁钩的高度和所述格栅的高度,确定所述鱼叉的锁钩是否与所述舰船飞行甲板上的所述格栅锁住,包括:
5.根据权利要求2所述的直升机鱼叉功能模拟方法,其特征在于,所述基于所述鱼叉与所述格栅的相对位移和相对速度,确定所述鱼叉的力和力矩,包括:
6.根据权利要求1至4任一项所述的直升机鱼叉功能模拟方法,其特征在于,所述方法还包括:
7.一种直升机鱼叉功能模拟装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述直升机鱼叉功能模拟方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述直升机鱼叉功能模拟方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述直升机鱼叉功能模拟方法。
技术总结
本发明提供一种直升机鱼叉功能模拟方法、装置、电子设备及存储介质,涉及航空技术领域,方法包括:基于直升机的位置信息和鱼叉的锁钩与所述直升机的相对位置信息,确定所述鱼叉的锁钩的位置信息;基于所述鱼叉的锁钩的位置信息,确定所述鱼叉的力和力矩;基于所述鱼叉的力和力矩,对所述鱼叉功能进行模拟。通过实时动态的位置信息,使得鱼叉的力和力矩的准确确定,进而准确对鱼叉功能进行模拟,提高了鱼叉功能模拟的可靠性,从而提升了鱼叉功能模拟的效率。
技术研发人员:张俊杰,刘长发,璩龙辉,孔令帅,邱梦琦,梅傲雪
受保护的技术使用者:北京蓝天航空科技股份有限公司
技术研发日:
技术公布日:2025/1/6
- 还没有人留言评论。精彩留言会获得点赞!