本公开涉及无人机领域,特别是涉及一种无人机的监测方法、系统、电子设备及程序产品。
背景技术:
1、随着计算机视觉技术和无线干扰技术的发展,目标识别和无线干扰预警的应用场景更加广泛。例如基于计算机视觉技术的目标识别技术,该技术可以识别各类场景下目标,从而能够识别出场景目标是否异常。然而在实际应用场景中,面对光照条件比较复杂以及外接自然因素干扰等情况下,各类算法的精度难以保证,极大影响了黑飞无人机识别与驱离效果。
技术实现思路
1、本公开要解决的技术问题是为了克服现有技术中的缺陷,提供一种基于神经网络的无人机监测方法、系统、电子设备及程序产品。
2、本公开是通过下述技术方案来解决上述技术问题:一种无人机监测方法,包括,
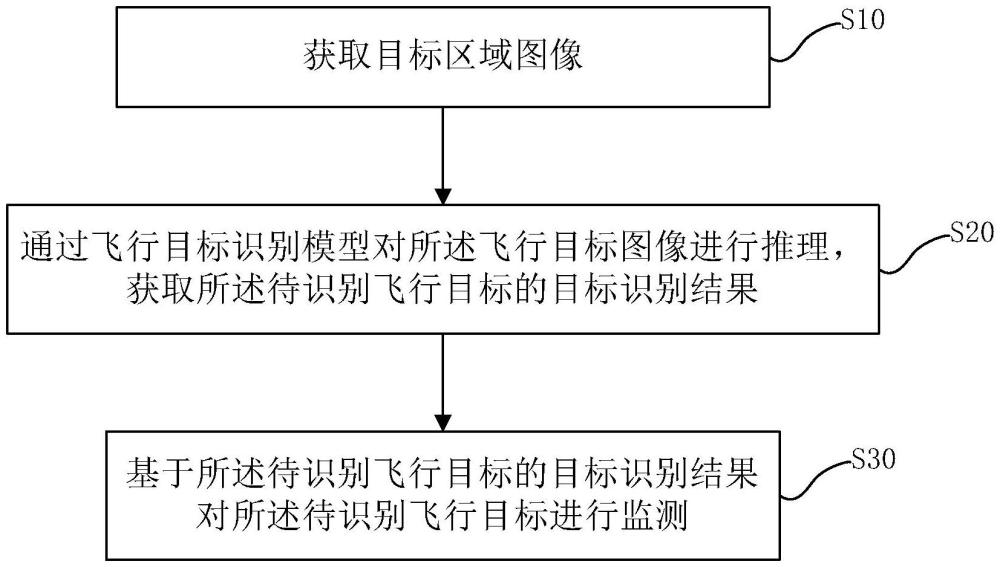
3、获取目标区域图像,所述目标区域图像包含待识别飞行目标;
4、通过飞行目标识别模型对所述飞行目标图像进行推理,获取所述待识别飞行目标的目标识别结果,所述飞行目标识别模型包括轻量级模型;
5、基于所述待识别飞行目标的目标识别结果对所述待识别飞行目标进行监测。
6、优选地,所述目标区域图像包括rgb图像和红外图像,
7、所述通过所述飞行目标识别模型对所述飞行目标图像进行推理,获取所述待识别飞行目标的目标识别结果,具体包括,
8、基于所述rgb图像输入所述轻量级模型得到第一识别结果;
9、基于所述红外图像输入所述轻量级模型得到第二识别结果;
10、将所述第一识别结果和第二识别结果代入融合算法中得到目标识别结果。
11、优选地,所述基于所述待识别飞行目标的目标识别结果对所述待识别飞行目标进行监测,具体包括,
12、确认所述待识别飞行目标是否为场内无人机;
13、响应于所述待识别飞行目标为黑飞无人机,对所述待识别飞行目标进行持续监测。
14、优选地,所述响应于所述待识别飞行目标为黑飞无人机,对所述待识别飞行目标进行持续监测,具体包括,
15、响应于所述待识别飞行目标进入预警区,启动跟踪无人机跟随并且语音驱离;
16、响应于所述待识别飞行目标进如禁飞区,击落所述待识别飞行目标。
17、优选地,响应于所述待识别飞行目标进入预警区,启动跟踪无人机跟随并且语音驱离,具体包括,
18、根据gps传感器获取所述跟踪无人机的位置;
19、所述跟踪无人机通过距离传感器获取所述待识别飞行目标的位置;
20、基于所述待识别飞行目标的位置,发送语音驱离。
21、优选地,所述获取目标区域图像,具体包括,
22、获取目标区域的视频流;
23、基于预设规则截取视频流中的图像帧;
24、对所述图像帧进行预处理得到所述目标区域图像。
25、优选地,所述轻量级模型为mobilenet模型;
26、所述飞行目标识别模型的训练方法为,收集无人机飞行目标识别数据集作为样本数据和训练数据,利用梯度下降反向传播方法,对模型中的深度卷积神经网络的参数进行迭代更新,将迭代更新至最大预设次数后得到的网络参数作为最优的网络参数。
27、本公开的另一方面,提供一种无人机监测系统,包括,
28、获取模块,获取目标区域图像,所述目标区域图像包含待识别飞行目标;
29、识别模块,用于通过飞行目标识别模型对所述飞行目标图像进行推理,获取所述待识别飞行目标的目标识别结果,所述飞行目标识别模型包括轻量级模型;
30、监测模块,基于所述待识别飞行目标的目标识别结果对所述待识别飞行目标进行监测。
31、本公开的另一方面,提供一种电子设备,包括存储器、处理器及存储在存储器上并用于在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任一项所述的无人机监测方法。
32、本公开的另一方面,提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现上述中任一项所述的无人机监测方法。
33、在符合本领域常识的基础上,上述各优选条件,可任意组合,即得本公开各较佳实例。
34、本公开的积极进步效果在于:基于神经网络的无人机监测方法、系统、电子设备及程序产品,通过深度学习算法识别目标飞行物,解决机器学习、复杂神经网络等传统方法准确度低、效率低等问题;使用了新的融合算法,有效提高了飞行目标识别的准确率;使用握手通信的方法,确认场内无人机,避免误损场内无人机的情况,造成资源浪费;使用新的定位计算和跟踪捕捉方法,定位黑飞无人机的实时位置,并有效击落黑飞无人机。与其他黑飞监测和干扰预警方法相比,本发明具有更快的识别速度、更高的识别精度、有效的干扰捕捉准确度,以及更好的延展性。
技术特征:1.一种无人机监测方法,其特征在于,包括,
2.如权利要求1所述的无人机监测方法,其特征在于,所述目标区域图像包括rgb图像和红外图像,
3.如权利要求1所述的无人机监测方法,其特征在于,所述基于所述待识别飞行目标的目标识别结果对所述待识别飞行目标进行监测,具体包括,
4.如权利要求3所述的无人机监测方法,其特征在于,所述响应于所述待识别飞行目标为黑飞无人机,对所述待识别飞行目标进行持续监测,具体包括,
5.如权利要求4所述的无人机监测方法,其特征在于,响应于所述待识别飞行目标进入预警区,启动跟踪无人机跟随并且语音驱离,具体包括,
6.如权利要求1所述的无人机监测方法,其特征在于,所述获取目标区域图像,具体包括,
7.如权利要求1所述的无人机监测方法,其特征在于,所述轻量级模型为mobilenet模型;
8.一种无人机监测系统,其特征在于,包括,
9.一种电子设备,包括存储器、处理器及存储在存储器上并用于在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的无人机监测方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1-7中任一项所述的无人机监测方法。
技术总结本公开提供了一种无人机监测方法、系统、电子设备及程序产品,包括,获取目标区域图像,所述目标区域图像包含待识别飞行目标;通过飞行目标识别模型对所述飞行目标图像进行推理,获取所述待识别飞行目标的目标识别结果,所述飞行目标识别模型包括轻量级模型;基于所述待识别飞行目标的目标识别结果对所述待识别飞行目标进行监测。基于神经网络的无人机监测方法、系统、电子设备及程序产品,通过深度学习算法识别目标飞行物,解决机器学习、复杂神经网络等传统方法准确度低、效率低等问题;与其他黑飞监测和干扰预警方法相比,本公开具有更快的识别速度、更高的识别精度、有效的干扰捕捉准确度,以及更好的延展性。
技术研发人员:刘志坚,郑鹏鹏
受保护的技术使用者:展讯半导体(南京)有限公司
技术研发日:技术公布日:2024/11/26