点云的去畸变方法、装置、电子设备及可读存储介质与流程
本申请涉及车载激光雷达,尤其涉及一种点云的去畸变方法、装置、电子设备及可读存储介质。
背景技术:
1、随着自动驾驶技术的发展,车载激光雷达因其能够精确测量周围环境的深度信息,被广泛应用于自动驾驶车辆中。然而,由于激光雷达的物理特性,运动场景下的激光点云会存在运动畸变,点云畸变是由于激光雷达在采集数据的过程中,随着车辆运动导致一帧点云中的点不是在同一时刻采集的,从而影响自动驾驶系统的性能。因此,如何有效地去除激光点云的运动畸变,提高点云数据的质量,是当前车载激光雷达技术领域亟待解决的问题。
2、现有技术中的激光点云去畸变算法通常只考虑去除由于自车运动而产生的畸变,利用自车的运动信息进行去畸变处理,忽略了自车和运动目标物相对运动造成的畸变,从而导致现在技术中激光点云去畸变的精准度较低。
技术实现思路
1、有鉴于此,本申请提供了一种点云的去畸变方法、装置、电子设备及可读存储介质,以解决现有技术中由于自车和运动目标物的相对运动导致激光点云去畸变的精准度低的问题。
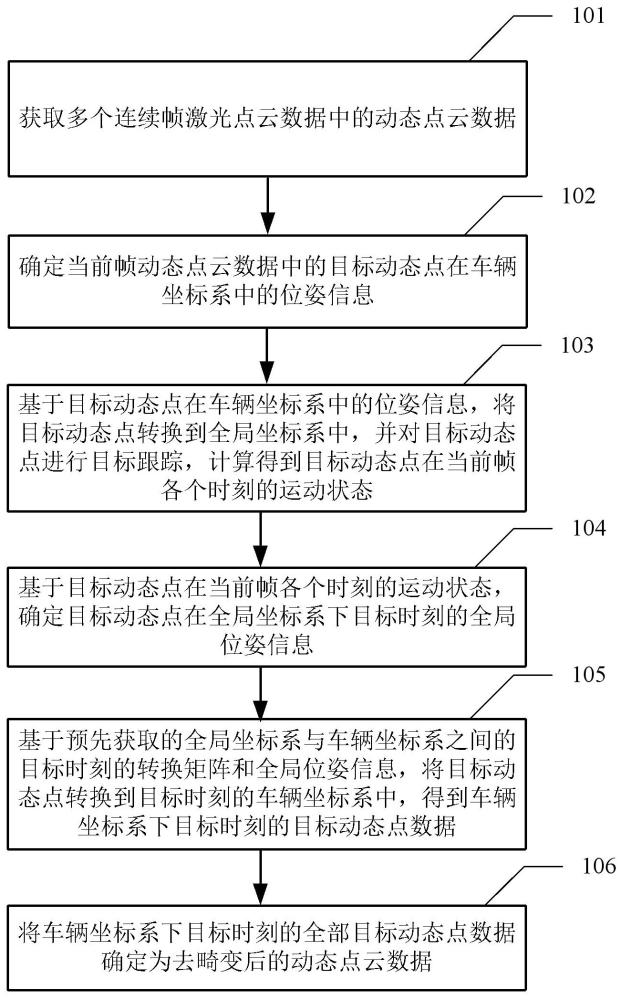
2、本申请的第一方面,提供了一种点云的去畸变方法,包括:获取多个连续帧激光点云数据中的动态点云数据,其中多个连续帧激光点云数据由车辆上的激光雷达采集得到,动态点云数据位动态对象对应的动态点的数据;确定当前帧动态点云数据中的目标动态点在车辆坐标系中的位姿信息;基于目标动态点在车辆坐标系中的位姿信息,将目标动态点转换到全局坐标系中,并对目标动态点进行目标跟踪,计算得到目标动态点在当前帧各个时刻的运动状态;基于目标动态点在当前帧各个时刻的运动状态,确定目标动态点在全局坐标系下目标时刻的全局位姿信息;基于预先获取的全局坐标系与车辆坐标系之间的目标时刻的转换矩阵和全局位姿信息,将目标动态点转换到目标时刻的车辆坐标系中,得到车辆坐标系下目标时刻的目标动态点数据;将车辆坐标系下目标时刻的全部目标动态点数据确定为去畸变后的动态点云数据。
3、本申请的第二方面,提供了一种点云的去畸变装置,包括:获取模块,用于获取多个连续帧激光点云数据中的动态点云数据,其中多个连续帧激光点云数据由车辆上的激光雷达采集得到,动态点云数据为动态对象对应的动态点的数据;第一确定模块,用于确定当前帧动态点云数据中的目标动态点在车辆坐标系中的位姿信息;预测模块,用于基于目标动态点在车辆坐标系中的位姿信息,将目标动态点转换到全局坐标系中,并对目标动态点进行目标跟踪,计算得到目标动态点在当前帧各个时刻的运动状态;坐标转换模块,用于基于目标动态点在当前帧各个时刻的运动状态,确定目标动态点在全局坐标系下目标时刻的全局位姿信息;修正模块,用于基于预先获取的全局坐标系与车辆坐标系之间的目标时刻的转换矩阵和全局位姿信息,将目标动态点转换到目标时刻的车辆坐标系中,得到车辆坐标系下目标时刻的目标动态点数据;第二确定模块,用于将车辆坐标系下目标时刻的全部目标动态点数据确定为去畸变后的动态点云数据。
4、本申请的第三方面,提供了一种电子设备,包括存储器、处理器以及存储在存储器中并且可在处理器上运行的计算机程序,该处理器执行计算机程序时实现上述方法的步骤。
5、本申请的第四方面,提供了一种可读存储介质,该可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现上述方法的步骤。
6、本申请与现有技术相比存在的有益效果是:通过确定当前帧动态点云数据中的目标动态点在车辆坐标系中的位姿信息,以便后续步骤中对目标动态点云进行修正和去畸变;基于目标动态点在车辆坐标系中的位姿信息,将目标动态点转换到全局坐标系中,使得目标动态点数据可以在一个统一的参考框架即全局坐标系下进行处理,便于进行目标跟踪和运动状态估计;对目标动态点进行目标跟踪,计算得到目标动态点在当前帧各个时刻的运动状态,为后续对目标动态点进行运动补偿提供依据;根据目标动态点在当前帧各个时刻的运动状态,计算目标动态点在当前帧目标时刻的精确位置,得到目标动态点在全局坐标系下目标时刻的全局位姿信息,将目标动态点云统一到同一时间戳下,从而消除运动畸变;使用预先获取的全局坐标系与车辆坐标系之间的转换矩阵,将目标动态点从全局坐标系转换回目标时刻的车辆坐标系中,得到目标动态点在车辆坐标系下目标时刻的目标动态点数据,实现对目标动态点数据的运动补偿,消除由于车辆自身运动和目标物运动引起的畸变;将车辆坐标系下目标时刻的目标动态点数据确定为去畸变后的动态点云数据,输出最终的去畸变后的动态点云数据,该数据可以供自动驾驶系统使用,提高系统的感知和决策能力。这样,本申请提出的点云的去畸变方法通过在全局坐标系下进行目标动态点跟踪和运动状态估计,从而更准确地预测动态对象的运动状态,利用动态对象的运动状态对目标动态点进行补偿,并再转换回车辆坐标系,解决现有技术中由于自车和运动目标物的相对运动导致激光点云去畸变的效果差的问题,从而消除动态对象的运动对点云数据的畸变影响,提高激光雷达点云数据的准确性和可用性,为车辆的自动驾驶提供高质量的环境感知信息。
技术特征:
1.一种点云的去畸变方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述确定当前帧动态点云数据中的目标动态点在车辆坐标系中的位姿信息,包括:
3.根据权利要求1所述的方法,其特征在于,所述基于所述目标动态点在车辆坐标系中的位姿信息,将所述目标动态点转换到全局坐标系中,包括:
4.根据权利要求1所述的方法,其特征在于,还包括:
5.根据权利要求4所述的方法,其特征在于,所述将所述静态点在车辆坐标系中的位姿信息转换至全局坐标系中,得到静态点在全局坐标系下的全局位姿信息,包括:
6.根据权利要求5所述的方法,其特征在于,所述车辆在全局坐标系下的当前帧的位姿信息包括车辆在当前帧的位置信息和车辆在当前帧的姿态信息;所述对所述车辆在全局坐标系下的当前帧的位姿信息进行插值计算,得到所述车辆在当前帧的各个时刻的位姿信息,包括:
7.根据权利要求1所述的方法,其特征在于,所述对所述目标动态点进行目标跟踪,计算得到所述目标动态点在当前帧各个时刻的运动状态,包括:
8.一种点云的去畸变装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器以及存储在所述存储器中并且可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述方法的步骤。
10.一种可读存储介质,所述可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述方法的步骤。
技术总结
本申请涉及车载激光雷达技术领域,提供了一种点云的去畸变方法、装置、电子设备及可读存储介质。该方法包括:确定当前帧动态点云数据中的目标动态点在车辆坐标系中的位姿信息;将目标动态点转换到全局坐标系中,并对目标动态点进行目标跟踪,计算得到目标动态点在当前帧各个时刻的运动状态;基于目标动态点在当前帧各个时刻的运动状态,确定目标动态点在全局坐标系下目标时刻的全局位姿信息;基于目标时刻的转换矩阵和全局位姿信息,得到车辆坐标系下目标时刻的目标动态点数据以实现对动态点云的去畸变,解决现有技术中由于自车和运动目标物的相对运动导致激光点云去畸变的效果差的问题,从而消除动态对象的运动对点云数据的畸变影响。
技术研发人员:唐康,张操,苏星溢
受保护的技术使用者:成都赛力斯科技有限公司
技术研发日:
技术公布日:2024/9/9
- 还没有人留言评论。精彩留言会获得点赞!