用于装卸设备的对准方法、装置、存储介质和电子终端与流程
本发明涉及储能设备装卸对准,具体涉及用于装卸设备的对准方法、装置、存储介质和电子终端。
背景技术:
1、随着全球能源转型的加速和可再生能源的广泛应用,大型储能设备如电池组、储能罐等在集装箱化运输中,如何高效、安全地将这些重型的储能设备装入或卸出集装箱是一个亟待解决的技术难题。
2、传统大型储能设备的集装箱装卸过程高度依赖人工操作,不仅耗时费力,且容易因操作不当导致设备损坏或人员伤害。另外,集装箱内部空间有限,要求装卸设备必须实现高精度对准,以确保设备能够平稳、无损地放置。然而,现有的装卸设备在自动化、智能化方面存在不足,特别是在储能设备对准环节,往往依赖于操作人员的经验和感觉,难以实现精确控制。因此,如何通过有效的对准方法,解决现有技术的缺失与不足,已成为该领域研究者亟待解决的重要问题。
技术实现思路
1、本发明的目的是针对上述问题,提供了一种用于装卸设备的对准方法、装置、存储介质和电子终端。
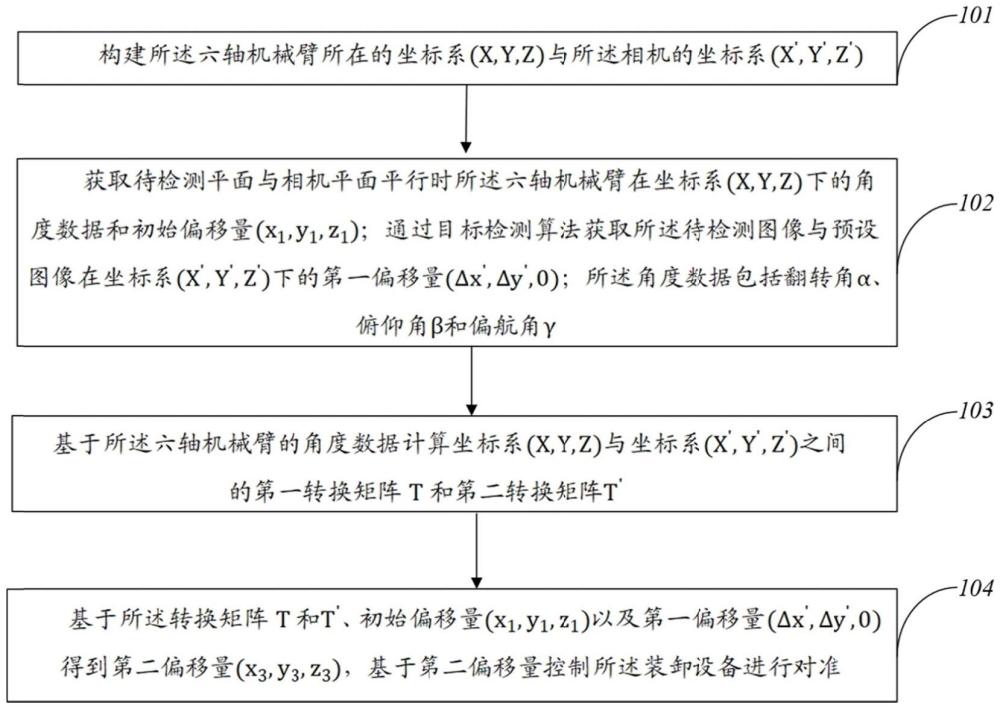
2、本发明的技术方案为:一种用于装卸设备的对准方法,所述装卸设备设置有相机和六轴机械臂,所述相机用于采集待检测图像,所述六轴机械臂用于装卸储能设备,所述对准方法包括以下步骤:构建所述六轴机械臂所在的坐标系(x,y,z)与所述相机的坐标系(x′,y′,z′);获取待检测平面与相机平面平行时所述六轴机械臂在坐标系(x,y,z)下的角度数据和初始偏移量(x1,y1,z1);通过目标检测算法获取所述待检测图像与预设图像在坐标系(x′,y′,z′)下的第一偏移量(δx′,δy′,0);所述角度数据包括翻转角α、俯仰角β和偏航角γ;基于所述六轴机械臂的角度数据计算坐标系(x,y,z)与坐标系(x′,y′,z′)之间的第一转换矩阵t和第二转换矩阵t′;基于所述转换矩阵t和t′、初始偏移量(x1,y1,z1)以及第一偏移量(δx′,δy′,0)得到第二偏移量(x3,y3,z3),基于第二偏移量控制所述装卸设备进行对准。
3、作为本发明实施例的一种改进,所述“获取待检测平面与相机平面平行时所述六轴机械臂在坐标系(x,y,z)下的角度数据”具体包括:当待检测平面与相机平面平行时,旋转z轴使得x轴以顺时针方向旋转到x′轴所形成的角度为偏航角γ,旋转y轴使得z轴以顺时针方向旋转到z′轴所形成的角度为俯仰角β,旋转x轴使得y轴以顺时针方向旋转到y′轴所形成的角度为翻转角α。
4、作为本发明实施例的一种改进,所述“通过目标检测算法获取所述待检测图像与预设图像在坐标系(x′,y′,z′)下的第一偏移量(δx′,δy′,0)”具体包括:获取预设图像和待检测图像,利用已训练好的yolov5目标检测模型分别对待检测图像和预设图像进行检测,得到预设图像的第一检测结果和待检测图像的第二检测结果,基于所述第一检测结果和所述第二检测结果得到所述待检测图像与预设图像在坐标系(x′,y′,z′)下的第一偏移量(δx′,δy′,0)。
5、作为本发明实施例的一种改进,所述第一转换矩阵t为坐标系(x′,y′,z′)转换到坐标系(x,y,z)的转换矩阵,t=tx*ty*tz,其中,
6、作为本发明实施例的一种改进,所述第二转换矩阵t为坐标系(x,y,z)转换到坐标系(x′,y′,z′)的转换矩阵,t′=tx′*ty′*tz′,其中,
7、作为本发明实施例的一种改进,所述“基于所述转换矩阵t和t′、初始偏移量(x1,y1,z1)以及第一偏移量(δx′,δy′,0)得到第二偏移量(x3,y3,z3)”具体包括:将初始偏移量(x1,y1,z1)变换到相机坐标系下得到(x′1,y′1,z′1);利用(x′1,y′1,z′1)和第一偏移量(δx′,δy′,0)得到(x′2,y′2,z′2);将(x′2,y′2,z′2)变换到六轴坐标系下得到(x2,y2,z2);其中,x3=x1-x2,y3=y1-y2,z3=z1-z2;x′2=x′1+δx′,y′2=y′1+δy′,z′2=z′1。
8、作为本发明实施例的一种改进,所述(x′1,y′1,z′1)=t′*(x′1,y′1,z′1),(x2,y2,z2)=t*
9、(x′2,y′2,z′2)。
10、为实现上述发明目的之一,本发明一实施方式提供了一种装卸设备的对准装置,所述装卸设备设置有相机和六轴机械臂,所述相机用于采集待检测图像,所述六轴机械臂用于装卸储能设备,所述对准装置包括以下模块:
11、坐标系构建模块,用于构建所述六轴机械臂所在的坐标系(x,y,z)与所述相机的坐标系(x′,y′,z′);
12、信息获取模块,用于获取待检测平面与相机平面平行时所述六轴机械臂在坐标系(x,y,z)下的角度数据和初始偏移量(x1,y1,z1);通过目标检测算法获取所述待检测图像与预设图像在坐标系(x′,y′,z′)下的第一偏移量(δx′,δy′,0);所述角度数据包括翻转角α、俯仰角β和偏航角γ;
13、处理模块,用于基于所述六轴机械臂的角度数据计算坐标系(x,y,z)与坐标系(x′,y′,z′)之间的第一转换矩阵t和第二转换矩阵t′;
14、对准模块,用于基于所述转换矩阵t和t′、初始偏移量(x1,y1,z1)以及第一偏移(δx′,δy′,0)得到所述第一偏移量在坐标系(x,y,z)下的第二偏移量,基于第二偏移量控制所述装卸设备进行对准。
15、为实现上述发明目的之一,本发明一实施方式提供了一种存储介质,存储有程序指令,所述程序指令被执行时实现如上任一项所述的对准方法。
16、为实现上述发明目的之一,本发明一实施方式提供了一种电子终端,包括处理器和存储器,所述存储器存储有程序指令,所述处理器运行程序指令实现如上任一项所述的对准方法。
17、本发明实施例所提供的装卸设备的对准方法、装置、存储介质和电子终端具有以下优点:
18、本发明通过构建相机与六轴机械臂的坐标系,提供坐标系之间的坐标转换方法,并应用目标检测算法,能够实时计算装卸设备与集装箱之间的偏移量,实现高精度对准,减少设备损坏风险,使装卸过程更加智能化,减少人工干预,提高工作效率和安全性,且本发明不受现场环境、光线等外部因素的限制,能够在各种复杂条件下稳定运行,确保装卸作业的顺利进行。
技术特征:
1.一种用于装卸设备的对准方法,所述装卸设备设置有相机和六轴机械臂,所述相机用于采集待检测图像,所述六轴机械臂用于装卸储能设备,其特征在于,包括以下步骤:
2.根据权利要求1所述的对准方法,其特征在于,所述“获取待检测平面与相机平面平行时所述六轴机械臂在坐标系(x,y,z)下的角度数据”具体包括:当待检测平面与相机平面平行时,旋转z轴使得x轴以顺时针方向旋转到x′轴所形成的角度为偏航角γ,旋转y轴使得z轴以顺时针方向旋转到z′轴所形成的角度为俯仰角β,旋转x轴使得y轴以顺时针方向旋转到y′轴所形成的角度为翻转角α。
3.根据权利要求1所述的对准方法,其特征在于,所述“通过目标检测算法获取所述待检测图像与预设图像在坐标系(x′,y′,z′)下的第一偏移量(δx′,δy′,0)”具体包括:获取预设图像和待检测图像,利用已训练好的yolov5目标检测模型分别对待检测图像和预设图像进行检测,得到预设图像的第一检测结果和待检测图像的第二检测结果,基于所述第一检测结果和所述第二检测结果得到所述待检测图像与预设图像在坐标系(x′,y′,z′)下的第一偏移量(δx′,δy′,0)。
4.根据权利要求1所述的对准方法,其特征在于,所述第一转换矩阵t为坐标系(x′,y′,z′)转换到坐标系(x,y,z)的转换矩阵,t=tx*ty*tz,其中,
5.根据权利要求1所述的对准方法,其特征在于,所述第二转换矩阵t为坐标系(x,y,z)转换到坐标系(x′,y′,z′)的转换矩阵,t′=t′x*t′y*t′z,其中,
6.根据权利要求1所述的对准方法,其特征在于,所述“基于所述转换矩阵t和t′、初始偏移量(x1,y1,z1)以及第一偏移量(δx′,δy′,0)得到第二偏移量(x3,y3,z3)”具体包括:将初始偏移量(x1,y1,z1)变换到相机坐标系下得到(x′1,y′1,z′1);利用(x′1,y′1,z′1)和第一偏移量(δx′,δy′,0)得到(x′2,y′2,z′2);将(x′2,y′2,z′2)变换到六轴坐标系下得到(x2,y2,z2);其中,x3=x1-x2,y3=y1-y2,z3=z1-z2;x′2=x′1+δx′,y′2=y′1+δy′,z′2=z′1。
7.根据权利要求6所述的对准方法,其特征在于,所述(x′1,y′1,z′1)=t′*(x′1,y′1,z′1),(x2,y2,z2)=t*(x′2,y′2,z′2)。
8.一种装卸设备的对准装置,所述装卸设备设置有相机和六轴机械臂,所述相机用于采集待检测图像,所述六轴机械臂用于装卸储能设备,其特征在于,包括以下步骤:
9.一种存储介质,存储有程序指令,其特征在于,所述程序指令被执行时实现如权利要求1至权利要求7任一项所述的对准方法。
10.一种电子终端,其特征在于,包括处理器和存储器,所述存储器存储有程序指令,所述处理器运行程序指令实现如权利要求1至权利要求7任一项所述的对准方法。
技术总结
本发明公开了用于装卸设备的对准方法、装置、存储介质和电子终端,对准方法包括:构建六轴机械臂所在的坐标系(X,Y,Z)与相机的坐标系(X′,Y′,Z′);获取待检测平面与相机平面平行时六轴机械臂的角度数据和初始偏移量;通过目标检测算法获取待检测图像与预设图像的第一偏移量;基于角度数据计算坐标系(X,Y,Z)与坐标系(X′,Y′,Z′)之间的第一转换矩阵T和第二转换矩阵T′;基于转换矩阵T和T′、初始偏移量以及第一偏移量得到第二偏移量,并控制装卸设备进行对准。本发明能够实时计算装卸设备与集装箱之间的偏移量,实现高精度对准,减少设备损坏风险。
技术研发人员:董嵘,章国泰,王珺,苗永春,司修利,游峰,刘秀生,王喆
受保护的技术使用者:沃太能源股份有限公司
技术研发日:
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!