基于机器视觉的5G天线位姿估计方法、设备和介质
本发明涉及定位检测领域,具体是涉及一种基于机器视觉的5g天线位姿估计方法、设备和介质。
背景技术:
1、随着5g通信技术的快速发展,对5g天线性能的测试变得尤为关键。在基于机械臂的5g天线近场检测系统中,需要根据5g天线的工作频率、尺寸来设置采样面的大小和高度,采样面的位置是根据5g天线的位姿确定的,而采样面的位置又决定了机械臂末端磁场探头的采样轨迹。只有当天线的位置、方向与磁场探头位置、方向相匹配时,才能准确地测量天线的电磁性能。
2、机器视觉能够在无接触的情况下完成物体识别、定位和测量等任务,在当今工业自动化和机器人技术的发展中发挥着至关重要的作用。其中,基于单目视觉的方法虽然简单易行,但无法提供目标物体的真实尺度信息;基于双目视觉的方法虽然能够恢复物体的三维信息,但其对环境光照和纹理要求较高,且立体匹配算法复杂;基于多目视觉的方法虽然能够提供更全面的视角信息,但其运算量大,成本高,且系统复杂性增加,不利于在实际生产环境中广泛应用。因此,上述方法在实际应用中均存在一定的局限性。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于机器视觉的5g天线位姿估计方法、设备和介质,以期能提高天线位姿估计的准确性和效率,并能降低系统复杂度。
2、为实现上述目的,本发明采用了以下技术方案:
3、本发明一种基于机器视觉的5g天线位姿估计方法的特点在于,包括以下步骤:
4、s1:当单目相机到达第i个采集点时,利用单目相机在第i个机械臂位姿下采集第i张天线图像,使用yolov8模型对中的天线进行检测,得到第i个roi区域天线图像,并将在中的左上角坐标记为;
5、s2:对第i-1个和第i个roi区域天线图像和进行特征提取和特征匹配,得到不共线的5g天线特征点在和上分别所对应在的像素点对、;其中,表示第j个5g天线特征点;表示在上的坐标,表示在上的坐标;m表示特征点的总数,m≥3;和表示第j个像素点对;
6、s3:利用式(1)计算m个像素点对分别在中的像素坐标、,其中,表示在上的坐标,表示在上的坐标:
7、 (1)
8、式(1)中,表示在第i-1张天线图像中的左上角坐标;
9、s4:基于三角测量原理,利用式(2)计算第j个5g天线特征点在机械臂基座坐标系下的坐标:
10、 (2)
11、式(2)中,为单目相机的内参矩阵,并通过相机标定获取;、分别为单目相机在第i次拍照时,相机坐标系相对于机械臂基座坐标系的旋转矩阵和平移向量,并通过坐标变换获取;、分别为单目相机在第i-1次拍照时,相机坐标系相对于机械臂基座坐标系的旋转矩阵和平移向量,并通过坐标变换获取;表示单目相机在第次拍照时的采集点到的深度值;表示单目相机在第次拍照时的采集点到的深度值;
12、s5:利用lm算法对式(3)所示的目标函数进行迭代优化,将s4的计算结果作为lm算法的初始值,求解第j个5g天线特征点在机械臂基座坐标系下的最优坐标;
13、 (3)
14、式(3)中,表示和之间的重定位误差;
15、s6:利用svd分解法拟合最优坐标集得到天线平面的法向量;其中,t表示转置;
16、s7:以天线平面的法向量的方向为天线坐标系的轴方向向量,记为;选取天线平面上的某一向量方向为天线坐标系的轴方向向量,记为;通过计算轴方向向量和轴方向向量的叉乘得到轴方向向量,记为;
17、s8:利用式(4)得到天线坐标系相对于机械臂基座标系的变换矩阵,即为和中天线的位姿:
18、 (4)
19、式(4)中,为天线坐标系相对于机械臂基座坐标系的旋转矩阵,为天线坐标系相对于机械臂基座坐标系的平移向量。
20、本发明所述的一种基于机器视觉的5g天线位姿估计方法的特点也在于,所述s5中的重定位误差是按如下步骤得到:
21、a:利用式(5)计算和之间的实际距离:
22、 (5)
23、b:根据余弦定理,利用式(6)计算和之间的重定位距离:
24、 (6)
25、c:根据实际距离、重定位距离,得到式(7)重定位误差:
26、 (7)。
27、s8中是利用式(8)计算旋转矩阵:
28、 (8)
29、s8中是选取5g天线上一固定点为天线坐标系的原点,将所述原点在机械臂基座坐标系下的坐标记为平移向量。
30、本发明一种电子设备的特点在于,包括:存储器,用于存储计算机程序;处理器,用于执行所述计算机程序时实现如所述基于机器视觉的5g天线位姿估计方法。
31、本发明一种计算机可读存储介质的特点在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如所述基于机器视觉的5g天线位姿估计方法。
32、本发明与现有技术相比,具有以下优势:
33、1.本发明采用机械臂与三角测量方法相结合的方式,利用机械臂带着单目相机在不同视角下拍摄图像,有效地替代了传统的双目或多目相机系统,减化了系统的结构,减少了运算量,同时也降低了硬件成本。
34、2.本发明实施简便,能够在机械臂携带探头执行检测5g天线的辐射性能任务的同时,计算待测5g天线的位姿进行计算,并基于机械臂位姿信息对计算出的位姿结果进行优化,提高了位姿估计的准确性。
35、3.本发明通过分析相机图像和机械臂末端位姿信息,实现了对待测5g天线位姿的估计,无需依赖先验的位姿信息,降低了系统对先验知识的依赖。
技术特征:
1.一种基于机器视觉的5g天线位姿估计方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于机器视觉的5g天线位姿估计方法,其特征在于,所述s5中的重定位误差是按如下步骤得到:
3.根据权利要求1所述的一种基于机器视觉的5g天线位姿估计方法,其特征在于,s8中是利用式(8)计算旋转矩阵:
4.根据权利要求1所述的一种基于机器视觉的5g天线位姿估计方法,其特征在于,s8中是选取5g天线上一固定点为天线坐标系的原点,将所述原点在机械臂基座坐标系下的坐标记为平移向量。
5.一种电子设备,其特征在于,包括:存储器,用于存储计算机程序;处理器,用于执行所述计算机程序时实现如权利要求1-4中任一项所述基于机器视觉的5g天线位姿估计方法。
6.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1-4中任一项所述基于机器视觉的5g天线位姿估计方法。
技术总结
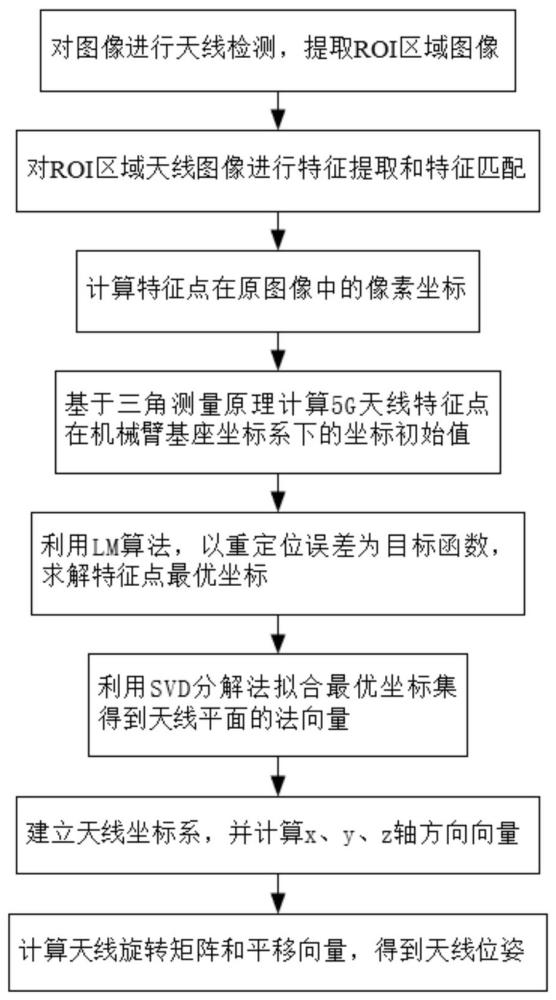
本发明公开了一种基于机器视觉的5G天线位姿估计方法、设备和介质,该方法包括:1对图像进行天线检测,提取ROI区域图像;2对ROI区域天线图像进行特征提取和特征匹配;3计算特征点在原图像中的像素坐标;4基于三角测量原理计算5G天线特征点在机械臂基座坐标系下的坐标初始值;5利用LM算法,以重定位误差为目标函数,求解特征点最优坐标;6利用SVD分解法拟合最优坐标集得到天线平面的法向量;7建立天线坐标系,并计算x、y、z轴方向向量;8计算天线旋转矩阵和平移向量,得到天线位姿。本发明能提高天线位姿估计的准确性和效率,并能降低系统复杂度。
技术研发人员:储昭碧,陈慧丽,冯小英,陈波,朱敏
受保护的技术使用者:合肥工业大学
技术研发日:
技术公布日:2024/11/18
- 还没有人留言评论。精彩留言会获得点赞!