一种电缆定位方法、装置、设备及存储介质与流程
本发明涉及配电网,尤其涉及一种电缆定位方法、装置、设备及存储介质。
背景技术:
1、在电力领域,变电站设备是电力系统中至关重要的组成部分。随着电力技术的不断发展和变电站的日益复杂,对站内设备的高效运维需求也不断增长。
2、现有技术中,各大电网公司的职员在进行日常作业中需要经常接触110kv高压电缆以及各类变电设备,变电站引流导线的人工拆装需要在带电环境下进行,存在的安全隐患时刻威胁人身安全。变电站设备密集的场景下,传统的工程设备在狭小的空间中无法开展作业。传统机器人输出能力/体积重量比值过小,无法保证引流导线安装质量问题。
技术实现思路
1、本发明提供了一种电缆定位方法、装置、设备及存储介质,以确定出电缆空间坐标,传输至机械臂控制器以进行电缆定位,保证了机械臂定位的准确性。
2、根据本发明的一方面,提供了一种电缆定位方法,该方法包括:
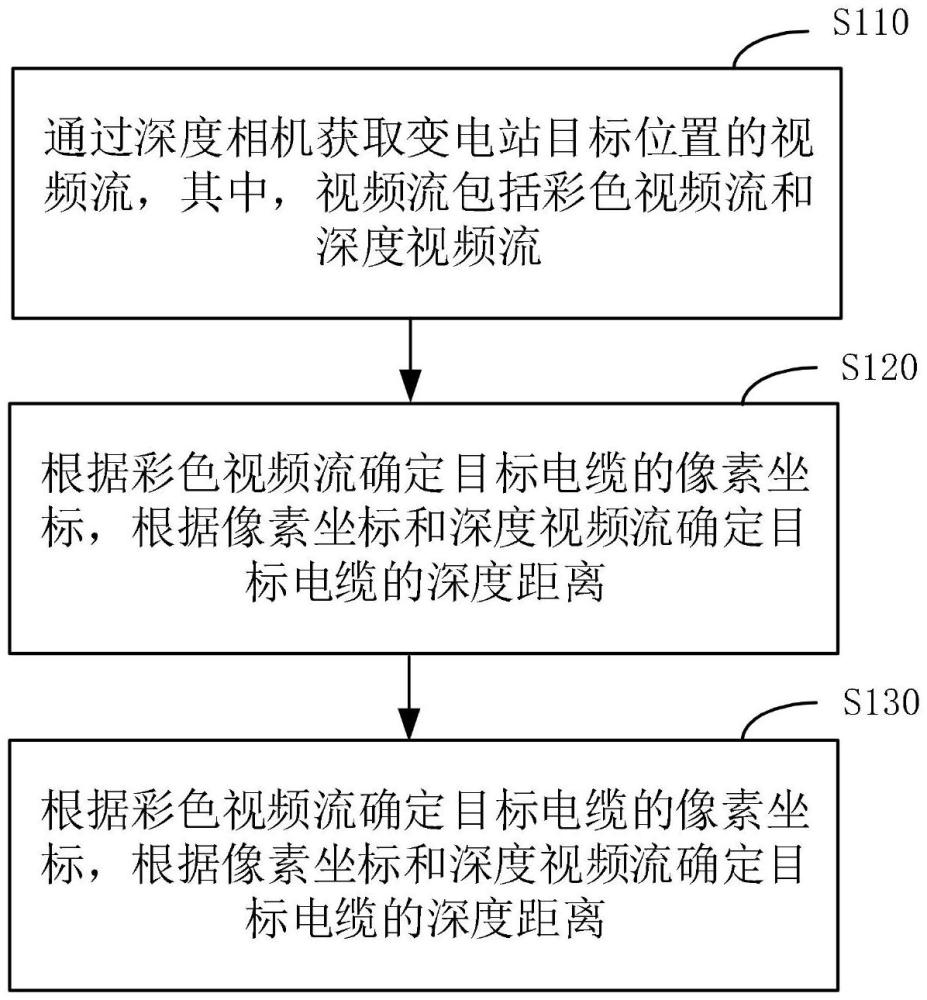
3、通过深度相机获取变电站目标位置的视频流,其中,视频流包括彩色视频流和深度视频流;
4、根据彩色视频流确定目标电缆的像素坐标,根据像素坐标和深度视频流确定目标电缆的深度距离;
5、根据像素坐标和深度距离确定电缆空间坐标,基于电缆空间坐标控制机械臂控制器进行电缆定位。
6、可选的,通过深度相机获取变电站目标位置的视频流,包括:将用户设置的变电站设备位置作为目标位置;通过深度相机的彩色rgb摄像头拍摄目标位置的彩色视频流;通过深度相机的深度摄像头拍摄目标位置的深度视频流。
7、可选的,根据彩色视频流确定目标电缆的像素坐标,包括:将彩色视频流逐帧输入预先构建的电缆识别模型,以获取模型输出的电缆识别框,其中,电缆识别框中包括目标电缆;基于彩色视频流建立坐标系,在坐标系中确定电缆识别框中心点的横纵坐标作为目标电缆的像素坐标。
8、可选的,根据像素坐标和深度视频流确定目标电缆的深度距离,包括:将深度视频流和彩色视频流进行对齐以生成对齐后的深度视频流;获取像素坐标在对齐后的深度视频流中的深度距离。
9、可选的,根据像素坐标和深度距离确定电缆空间坐标,包括:将像素坐标和深度距离相结合以生成目标电缆的像素定位坐标;对深度相机进行棋盘标定以获取相机内参矩阵;将像素定位坐标和相机内参矩阵相乘以生成电缆空间坐标。
10、可选的,基于电缆空间坐标控制机械臂控制器进行电缆定位,包括:对机械臂和标定相机进行手眼标定以确定坐标转换公式;将电缆空间坐标代入坐标转换公式以确定机械臂控制坐标,根据机械臂控制坐标控制机械臂控制器。
11、可选的,对机械臂和标定相机进行手眼标定以确定坐标转换公式,包括:基于机械臂和标定相机构建各变换坐标系,其中,变换坐标系包括机械臂基底坐标系、机械臂末端坐标系、相机坐标系和标定板坐标系;根据各变换坐标系生成各坐标系变换矩阵,其中,坐标系变换矩阵包括标定板坐标系到机械臂基底坐标系变换矩阵、标定板坐标系到相机坐标系变换矩阵、相机坐标系到机械臂末端坐标系变换矩阵和机械臂末端坐标系到机械臂基底坐标系变换矩阵;根据各坐标系变换矩阵确定坐标转换公式。
12、根据本发明的另一方面,提供了一种电缆定位装置,该装置包括:
13、视频流获取模块,用于通过深度相机获取变电站目标位置的视频流,其中,视频流包括彩色视频流和深度视频流;
14、像素坐标和深度距离确定模块,用于根据彩色视频流确定目标电缆的像素坐标,根据像素坐标和深度视频流确定目标电缆的深度距离;
15、机械臂电缆定位模块,用于根据像素坐标和深度距离确定电缆空间坐标,基于电缆空间坐标控制机械臂控制器进行电缆定位。
16、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
17、至少一个处理器;
18、以及与所述至少一个处理器通信连接的存储器;
19、其中,所述存储器存储有能够被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的一种电缆定位方法。
20、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的一种电缆定位方法。
21、本发明实施例的技术方案,通过深度相机获取变电站目标位置的视频流,可以全面、实时地获取目标区域的信息,为后续的分析和处理提供丰富的数据基础。利用彩色视频流确定目标电缆的像素坐标,能够准确地识别和定位目标电缆在图像中的位置,提高了定位的精度和准确性。结合像素坐标和深度视频流确定目标电缆的深度距离,实现了对目标电缆三维空间信息的获取,更加全面和精确地了解目标电缆的位置状态。根据像素坐标和深度距离确定电缆空间坐标,使得对电缆位置的描述更加准确和具体,为机械臂控制器的精准控制提供了可靠依据。基于电缆空间坐标控制机械臂控制器进行电缆定位,可实现高效、准确的电缆定位操作,减少人工干预,降低出错概率,提高工作效率和安全性,保障变电站设备的正常运行和维护,同时也有利于提升变电站整体的智能化水平和运维管理质量。
22、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种电缆定位方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述通过深度相机获取变电站目标位置的视频流,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述彩色视频流确定目标电缆的像素坐标,包括:
4.根据权利要求3所述的方法,其特征在于,所述根据所述像素坐标和所述深度视频流确定目标电缆的深度距离,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述像素坐标和所述深度距离确定电缆空间坐标,包括:
6.根据权利要求1所述的方法,其特征在于,所述基于所述电缆空间坐标控制机械臂控制器进行电缆定位,包括:
7.根据权利要求6所述的方法,其特征在于,所述对机械臂和标定相机进行手眼标定以确定坐标转换公式,包括:
8.一种电缆定位装置,其特征在于,包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机存储介质,其特征在于,所述计算机存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的方法。
技术总结
本发明公开了一种电缆定位方法、装置、设备及存储介质。包括:通过深度相机获取变电站目标位置的视频流;根据彩色视频流确定目标电缆的像素坐标,根据像素坐标和深度视频流确定目标电缆的深度距离;根据像素坐标和深度距离确定电缆空间坐标,基于电缆空间坐标控制机械臂控制器进行电缆定位。通过深度相机获取视频流,可以全面地获取目标区域的信息,为后续的分析和处理提供丰富的数据基础。实现了对目标电缆三维空间信息的获取,更加全面和精确地了解目标电缆的位置状态。基于电缆空间坐标控制机械臂控制器进行电缆定位,可实现高效、准确的电缆定位操作,减少人工干预,降低出错概率,提高工作效率和安全性,保障变电站设备的正常运行和维护。
技术研发人员:刘培杰,曾拓,曾鼎骥,陈俊辉,孙维,刘国良,曾国海,黄浩,乔江峰
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2024/11/26
- 还没有人留言评论。精彩留言会获得点赞!