基于无人机电力巡检的视频分析方法、装置及系统与流程
本发明涉及电力巡检。更具体地说,本发明涉及一种基于无人机电力巡检的视频分析方法、装置及系统。
背景技术:
1、目前,长距离电力输送的主要采用高压和超高压架空输电线,且输电线路通常经过丘陵、高山、森林、湖泊、大江大河等复杂多变的不良区域,以及输电线长期暴露在野外,不仅受到电力负荷带来压力,也长期受到外界不良环境影响,比如雷电、暴雨等恶劣天气影响,比如污秽腐蚀等外力影响,可能造成输电线的绝缘子磨损、缺失、导线断股,附件的缺失,比如防震锤缺失。这些故障将严重威胁电能传输、电网安全运行。比如,树木放电引起的线路闪烙、电网停电、林区火灾等事故。因此,需要对输电线进行定期巡检,减少事故的发生,现有的人工输电线巡检已远远不能满足现实需要,效率过低,对于复杂地形人力巡检安全性无法保障。基于现有无人机具有精准的定位巡航功能,且可以搭载一定重物后稳定飞行,以及视频图像处理技术也得到了显著改进,可以识别视频图像中的目标物体,可以计算位置和灰度值等。因此,基于无人机和视频图像处理技术研究一种可以适配电力巡检的系统以提升巡检效率和安全性是有可能的,且也是值得深思的。
技术实现思路
1、本发明的一个目的是解决至少上述问题,并提供至少后面将说明的优点。
2、为了实现根据本发明的这些目的和其它优点,提供了一种基于无人机电力巡检的视频分析方法,包括以下步骤:
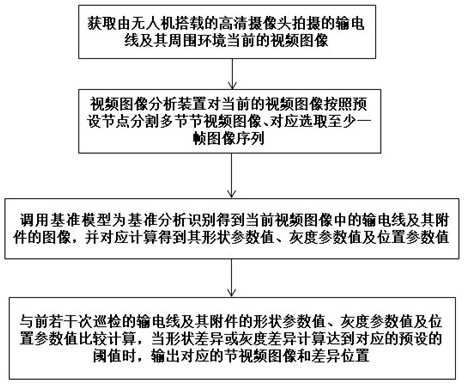
3、s1、获取由无人机搭载的高清摄像头拍摄的输电线及其周围环境当前的视频图像;
4、s2、对当前的视频图像按照预设节点分割多节节视频图像,每节节视频图像中选取至少一帧图像序列,并对选取出的图像序列按照预设的方位、尺寸及光强调整,然后调用预设的输电线及其附件的基准模型为基准分析识别得到当前视频图像中的输电线及其附件的图像,并对应计算得到其形状参数值、灰度参数值及位置参数值;
5、s3、将识别得到的当前视频图像中的输电线及其附件的图像形状参数值、灰度参数值及位置参数值分别与前若干次巡检得到的对应的输电线及其附件的图像形状参数值、灰度参数值及位置参数值分别进行形状差异、灰度差异及位置差异计算,当形状差异或灰度差异计算达到对应的预设的阈值时,输出对应的节视频图像和差异位置。
6、优选的是,所述输电线及其附件包括输电线、防振锤附件、间隔棒附件、绝缘子附件、输电杆塔;
7、基准模型的建立方法具体包括:对每节节视频图像中的输电线及其附件进行人工处理和分隔,并剔除周围环境,得到输电线、防振锤附件、间隔棒附件、绝缘子附件、输电杆塔的独立图像,即得输电线、防振锤附件、间隔棒附件、绝缘子附件、输电杆塔的基准模型,其中,基准模型中包含形状参数、灰度参数及位置参数。
8、优选的是,基准模型的建立方法包括增强处理、去噪处理及边缘检测;
9、所述增强处理包括:设置灰度值区间为[a,c],对灰度值区间在[a,c]内的像素点进行增强,对位于灰度值区间在[a,c]内的像素点的灰度值保持不变;其中,灰度值区间在[a,c]适配设置为输电线及其附件的像素点;
10、所述去噪处理包括:设置去噪阈值t和邻域范围s,计算某一点像素与其领域范围s内各像素点的灰度值的平均值的差值,若该差值大于去噪阈值t,则用该平均值取代该点像素的灰度值,若该差值不大于去噪阈值t,则该点像素的灰度值保持不变;
11、所述边缘检测采用sobel算子边缘检测方法。
12、优选的是,步骤s1中无人机搭载高清摄像头拍摄视频图像的路线设置方法包括:无人机从起点段预飞行至终点段,高清摄像头同步获取对应视频图像,无人机在终点段待命;
13、挑选出视频图像中输电线及其附件的图像与其周围环境的灰度值差异小于预设阈值的各段视频图像,调整无人机从终点段返回起点段的飞行方位及高清摄像头的拍摄方位再次获取视频图像,重复比对视频图像中输电线及其附件的图像与其周围环境的灰度值差异,直至无人机单程飞行路线中获取的视频图像中输电线及其附件的图像与其周围环境的灰度值差异不小于预设阈值,即得无人机飞行路线。
14、提供一种执行所述的基于无人机电力巡检的视频分析方法的视频分析装置,包括:
15、图像获取模块,其用于获取由无人机搭载的高清摄像头拍摄的输电线及其周围环境当前的视频图像;
16、图像处理模块,其用于对当前的视频图像按照预设节点分割多节节视频图像,每节节视频图像中选取至少一帧图像序列,并对选取出的图像序列按照预设的方位、尺寸及光强调整,然后调用预设的输电线及其附件的基准模型为基准分析识别得到当前视频图像中的输电线及其附件的图像,并对应计算得到其形状参数值、灰度参数值及位置参数值;
17、差异输出模块,其用于将识别得到的当前视频图像中的输电线及其附件的图像形状参数值、灰度参数值及位置参数值分别与前若干次巡检得到的对应的输电线及其附件的图像形状参数值、灰度参数值及位置参数值分别进行形状差异、灰度差异及位置差异计算,当形状差异或灰度差异计算达到对应的预设的阈值时,输出对应的节视频图像和差异位置。
18、提供一种基于无人机电力巡检的视频分析系统,包括:
19、无人机,其上安装有飞控系统、高清摄像头、无线传输系统,所述高清摄像头用于拍摄获取输电线及其周围环境的视频图像;
20、地面远程控制系统,其与所述飞控系统通讯连接,所述地面远程控制系统用于控制所述无人机按照飞行路线飞行;
21、所述的基于无人机电力巡检的视频分析装置;
22、显示器,其与所述地面远程控制系统、所述视频分析装置连接,所述显示器用于显示所述视频分析装置接收到的视频图像、所述飞控系统和地面远程控制系统的飞行数据,以及所述视频分析装置的输出。
23、提供一种电子设备,包括:
24、一个或多个处理器;
25、存储器;以及
26、一个或多个程序,其中所述一个或多个程序被存储在所述存储器中,并且被配置成由所述一个或多个处理器执行,所述程序包括用于执行所述的方法。
27、提供一种计算机可读存储介质,存储于具有一种电子设备结合使用的计算机程序,所述计算机程序可被处理器执行以实现所述的方法。
28、本发明至少包括以下有益效果:通过将巡检得到的视频图像分割为多节节视频图像,然后从节视频图像中提取与地理位置匹配的一帧或若干帧图像序列,可以显著减少视频图像的处理量,节约计算机资源的耗费。在此之后,由于图像序列量小,计算机可以同时处理分析多帧图像序列,从而显著提升了图像处理效率。再通过前期针对地理位置差异为每段巡检范围的节视频图像预先设置基准模型,可以滤掉周围环境、输电线及其附件的形态不同带来的噪声,从而显著提升视频分析精准性。
29、本发明的其它优点、目标和特征将部分通过下面的说明体现,部分还将通过对本发明的研究和实践而为本领域的技术人员所理解。
技术特征:
1.基于无人机电力巡检的视频分析方法,其特征在于,包括以下步骤:
2.如权利要求1所述的基于无人机电力巡检的视频分析方法,其特征在于,所述输电线及其附件包括输电线、防振锤附件、间隔棒附件、绝缘子附件、输电杆塔;
3.如权利要求2所述的基于无人机电力巡检的视频分析方法,其特征在于,基准模型的建立方法包括增强处理、去噪处理及边缘检测;
4.如权利要求1所述的基于无人机电力巡检的视频分析方法,其特征在于,步骤s1中无人机搭载高清摄像头拍摄视频图像的路线设置方法包括:无人机从起点段预飞行至终点段,高清摄像头同步获取对应视频图像,无人机在终点段待命;
5.执行权利要求1~4任一项所述的基于无人机电力巡检的视频分析方法的视频分析装置,其特征在于,包括:
6.基于无人机电力巡检的视频分析系统,其特征在于,包括:
7.电子设备,其特征在于,包括:
8.计算机可读存储介质,其特征在于,存储于具有一种电子设备结合使用的计算机程序,所述计算机程序可被处理器执行以实现权利要求1~4任一项所述的方法。
技术总结
本发明公开了一种基于无人机电力巡检的视频分析方法、装置及系统,包括:S1、获取由无人机搭载高清摄像头拍摄的输电线及其周围环境当前的视频图像;S2、按照预设节点分割为多节节视频图像,选取至少一帧图像序列,调用预设的输电线及其附件的基准模型为基准分析识别得到输电线及其附件的图像,计算形状参数值、灰度参数值及位置参数值;S3、与前若干次巡检得到的输电线及其附件的图像形状参数值、灰度参数值及位置参数值比较计算形状差异、灰度差异及位置差异,达到阈值时,输出对应的节视频图像和差异位置。本发明具有减少图像视频分析数据量、提升输电线及其附件识别精度、提升巡检效率的有益效果。
技术研发人员:周会生,麻建宗,许强,郝青山
受保护的技术使用者:中交机电工程局有限公司
技术研发日:
技术公布日:2024/9/26
- 还没有人留言评论。精彩留言会获得点赞!