基于机器视觉的大型罐区安全监测方法、装置及电子设备
本发明涉及罐区安全监测,尤其涉及一种基于机器视觉的大型罐区安全监测方法、装置及电子设备。
背景技术:
1、随着工业自动化和智能化的发展,大型罐区的安全监测技术越来越受到关注。为了保障罐区安全,常采用传感器网络等多种手段对罐区进行实时监测。然而,现有技术在实际应用中存在一些问题,限制了其在储罐区安全监测领域的进一步推广和应用。
2、具体来说,一些现有技术利用传感器网络进行监测,通过在罐区内布置烟雾传感器、温度传感器等设备,对罐区内的各种环境参数进行实时监测。这种方法可以及时了解罐区内的安全状况,但存在以下局限:(1)需要大量传感器:为了提高监测的准确性和覆盖范围,往往需要布置大量传感器,这增加了系统的复杂性和成本;(2)检查和维护频繁:传感器网络需要定期检查和维护,以确保监测数据的准确性。这给操作人员带来了一定的负担,增加了系统的运行成本。
3、此外,还有一些现有技术利用机器视觉进行监测,通过图像采集设备获取罐区内环境的实时图像,利用图像处理技术对图像进行分析和识别。这种方法可以实现对罐区内目标的实时监测,但存在以下问题:(1)对环境光照敏感:在室外罐区监测中,光线的变化会对图像质量造成影响,从而降低检测和识别准确性;(2)复杂背景干扰:大型罐区存在复杂的背景干扰,如管道、设备、人员等,这些干扰难以与目标物体进行区分,影响监测效果。
4、与此同时,随着国家新“环境空气质量标准”的发布,挥发性有机物(vocs)排放控制也越来越得到重视。大型罐区的泄漏、挥发性有机物检测与监测也变得更加重要,传统的方法是通过采集挥发性有机物或者介质泄漏物理参数来判断,定期采集可以得到罐区安全状况,无法实现实时监测,机器视觉技术具有24小时不间断监测,配合红外成像摄像头,改进的图像处理算法,可以实现远程、非接触式罐区、管道、设备等泄漏监测。
5、综上所述,解决现有罐区安全监测方法需要耗费高昂成本,且监测效果不佳的问题,显得十分必要。
技术实现思路
1、本发明提供一种基于机器视觉的大型罐区安全监测方法、装置及电子设备,用以克服现有罐区安全监测方法需要耗费高昂成本,且监测效果不佳的缺陷,以提高罐区监测的准确性和稳定性。
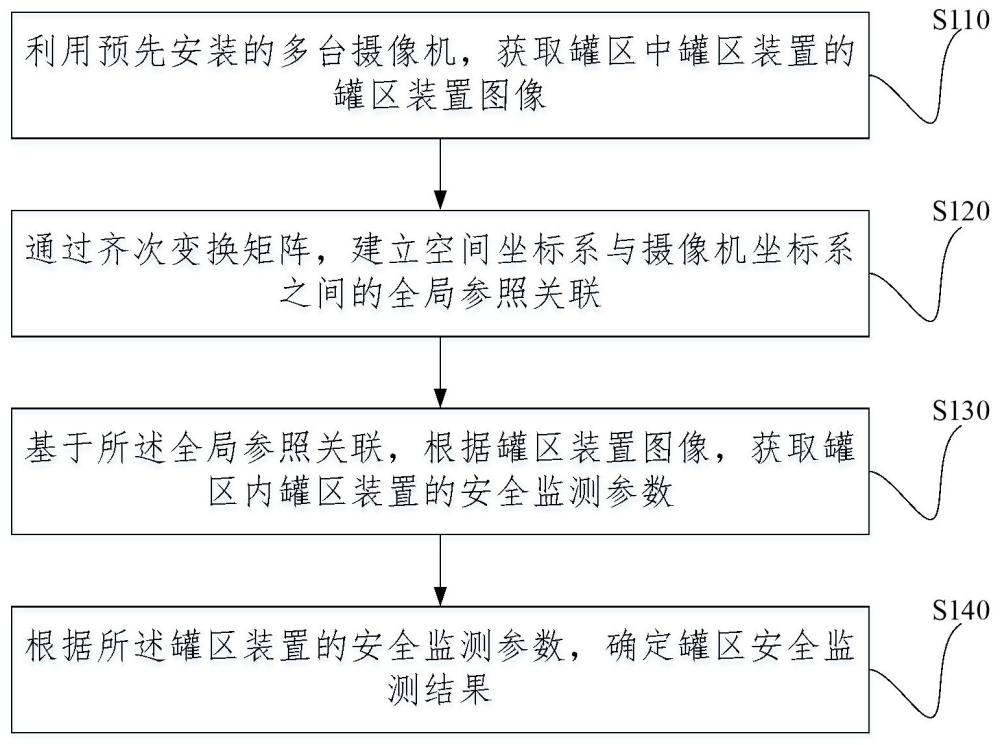
2、一方面,本发明提供一种基于机器视觉的大型罐区安全监测方法,包括:利用预先安装的多台摄像机,获取罐区中罐区装置的罐区装置图像;通过齐次变换矩阵,建立空间坐标系与摄像机坐标系之间的全局参照关联;基于所述全局参照关联,根据罐区装置图像,获取罐区内罐区装置的安全监测参数;根据所述罐区装置的安全监测参数,确定罐区安全监测结果。
3、进一步地,所述利用预先安装的多台摄像机,获取罐区中罐区装置的罐区装置图像,包括:在所述多台摄像机动态运行和/或罐区装置空间移动的情况下,获取罐区装置图像。
4、进一步地,所述通过齐次变换矩阵,建立空间坐标系与摄像机坐标系之间的全局参照关联,包括:通过平移矩阵将空间坐标系的原点平移到摄像机的位置;通过旋转矩阵将空间坐标系旋转到与摄像机坐标系对齐;将平移矩阵和旋转矩阵进行组合,得到齐次变换矩阵;根据所述齐次变换矩阵,建立得到从空间坐标系到摄像机坐标系的全局参照关联。
5、进一步地,所述摄像机为热红外摄像机,所述罐区装置图像为热红外图像;所述基于所述全局参照关联,根据罐区装置图像,获取罐区内罐区装置的安全监测参数,包括:获取所述热红外图像中罐区装置各部位的温度值,以及罐区装置上相邻部位的温度差值;其中,所述安全监测参数包括所述温度值和所述温度差值;相应的,所述根据所述罐区装置的安全监测参数,确定罐区安全监测结果,包括:确定所述温度值高于第一设定阈值的第一部位;和/或,确定所述温度值低于第二设定阈值的第二部位;和/或,确定所述温度差值高于预设差值的第三部位;将所述第一部位、第二部位、第三部位确定为存在气体或液体泄漏迹象的部位,得到所述罐区安全监测结果;其中,所述第一设定阈值大于所述第二设定阈值。
6、进一步地,所述基于所述全局参照关联,根据罐区装置图像,获取罐区内罐区装置的安全监测参数,包括:对所述罐区装置图像进行边缘检测,得到裂缝轮廓;从所述裂缝轮廓中提取裂缝特征参数,所述裂缝特征参数包括裂缝的位置、长度、宽度、方向及面积;其中,所述安全监测参数包括所述裂缝特征参数;相应的,所述根据所述罐区装置的安全监测参数,确定罐区安全监测结果,包括:根据所述裂缝特征参数,确定所述罐区装置的风险等级;确定所述风险等级达到设定等级;将所述裂缝特征参数中裂缝的位置确定为需要进行维护、修复或更换的部位,得到所述灌区安全监测结果。
7、进一步地,还包括:利用预先安装的多台摄像机,获取罐区中操作人员的目标图像;根据所述目标图像,确定所述操作人员的授权信息和穿戴装备;基于所述全局参照关联,根据所述目标图像确定操作人员在罐区中的实际位置;在所述操作人员的授权信息、穿戴设备以及实际位置中任意一项不符合预设条件的情况下,向罐区中安保人员发出警报,以及时采取安全措施。
8、第二方面,本发明还提供一种基于机器视觉的大型罐区安全监测装置,包括:罐区装置图像获取模块,用于利用预先安装的多台摄像机,获取罐区中罐区装置的罐区装置图像;全局参照关联建立模块,用于通过齐次变换矩阵,建立空间坐标系与摄像机坐标系之间的全局参照关联;安全监测参数获取模块,用于基于所述全局参照关联,根据罐区装置图像,获取罐区内罐区装置的安全监测参数;安全监测结果确定模块,用于根据所述罐区装置的安全监测参数,确定罐区安全监测结果。
9、第三方面,本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述的基于机器视觉的大型罐区安全监测方法。
10、第四方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述的基于机器视觉的大型罐区安全监测方法。
11、第五方面,本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述的基于机器视觉的大型罐区安全监测方法。
12、本发明提供的基于机器视觉的大型罐区安全监测方法,通过利用预先安装的多台摄像机,获取罐区中罐区装置的罐区装置图像,并通过齐次变换矩阵,建立空间坐标系与摄像机坐标系之间的全局参照关联,进而基于全局参照关联,根据罐区装置图像,获取罐区内罐区装置的安全监测参数,从而,根据罐区装置的安全监测参数,确定罐区安全监测结果。该方法通过齐次变换矩阵建立空间坐标系与摄像机坐标系之间的全局参照关联,在整个罐区范围内建立统一的参照框架,不仅能够准确获取摄像机的位置和方向,根据罐区装置图像进行安全监测参数的精确测量,实现更全面的安全监测,还可以适应摄像机的旋转或移动,使得安全监测更加灵活可靠,与此同时,此过程不需要布设大量传感器,降低了耗费成本。
技术特征:
1.一种基于机器视觉的大型罐区安全监测方法,其特征在于,包括:
2.根据权利要求1所述的基于机器视觉的大型罐区安全监测方法,其特征在于,所述利用预先安装的多台摄像机,获取罐区中罐区装置的罐区装置图像,包括:
3.根据权利要求1所述的基于机器视觉的大型罐区安全监测方法,其特征在于,所述通过齐次变换矩阵,建立空间坐标系与摄像机坐标系之间的全局参照关联,包括:
4.根据权利要求1所述的基于机器视觉的大型罐区安全监测方法,其特征在于,所述摄像机为热红外摄像机,所述罐区装置图像为热红外图像;
5.根据权利要求1所述的基于机器视觉的大型罐区安全监测方法,其特征在于,所述基于所述全局参照关联,根据罐区装置图像,获取罐区内罐区装置的安全监测参数,包括:
6.根据权利要求1-5中任一项所述的基于机器视觉的大型罐区安全监测方法,其特征在于,还包括:
7.一种基于机器视觉的大型罐区安全监测装置,其特征在于,包括:
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6中任一项所述的基于机器视觉的大型罐区安全监测方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6中任一项所述的基于机器视觉的大型罐区安全监测方法。
10.一种计算机程序产品,包括计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6中任一项所述的基于机器视觉的大型罐区安全监测方法。
技术总结
本发明提供一种基于机器视觉的大型罐区安全监测方法、装置及电子设备,其中的方法包括:利用预先安装的多台摄像机,获取罐区中罐区装置的罐区装置图像;通过齐次变换矩阵,建立空间坐标系与摄像机坐标系之间的全局参照关联;基于全局参照关联,根据罐区装置图像,获取罐区内罐区装置的安全监测参数;根据罐区装置的安全监测参数,确定罐区安全监测结果。该方法通过齐次变换矩阵建立空间坐标系与摄像机坐标系之间的全局参照关联,在整个罐区范围内建立统一的参照框架,不仅能够准确获取摄像机的位置和方向,根据罐区装置图像进行安全监测参数的精确测量,实现更全面的安全监测,还可以适应摄像机的旋转或移动,使得安全监测更加灵活可靠,与此同时,此过程不需要布设大量传感器,降低了耗费成本。
技术研发人员:梁伟,张来斌
受保护的技术使用者:中国石油大学(北京)
技术研发日:
技术公布日:2025/1/9
- 还没有人留言评论。精彩留言会获得点赞!