一种无人系统人工干预度评估方法
本发明涉及无人系统试验评估领域,具体涉及一种无人系统人工干预度评估方法。
背景技术:
1、无人系统通常被设计为自主系统,能够独立执行任务、适应环境变化并完成预定的目标。自主系统技术的发展使得无人系统能够实现更高程度的自主操作,减少人工干预并提高系统的整体效率。
2、人工干预度是指在装备执行任务过程中,人员干预装备操作、决策等任务过程的程度,表示装备执行任务对外界操作人员的依赖程度。人工干预度越高,表示装备对外界操作人员的依赖程度越高,则装备系统自主水平越低。
3、目前,无人系统的人工干预度存在评估方法、评估手段缺失、无法量化等问题。因此,有待于开发一种无人系统人工干预度评估方法,准确评估无人系统的人工干预度。
技术实现思路
1、本发明采用的技术方案如下:
2、本发明提供一种面向无人系统的人工干预度评估方法,具体包括如下步骤:
3、步骤一:评估数据准备
4、通过设置无人系统典型任务场景进行试验考核,采集整个试验过程中,无人系统平台、地面站与操作人员之间的交互数据;
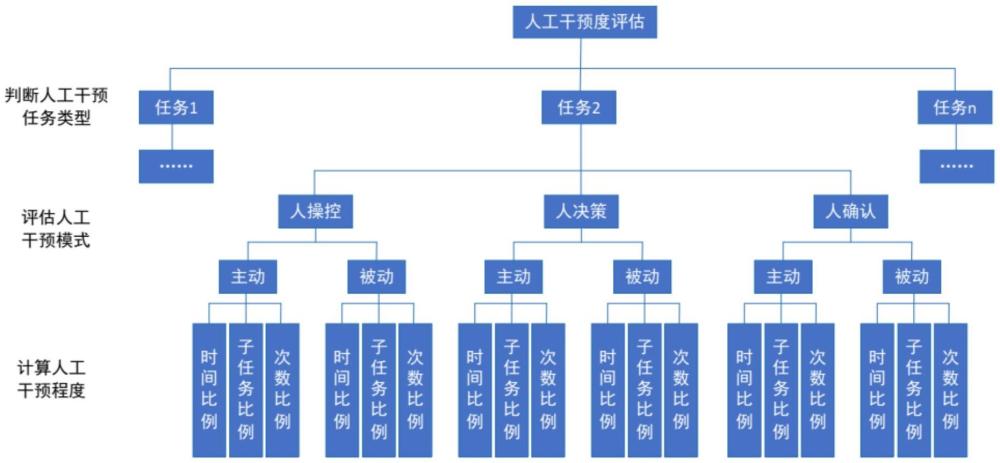
5、步骤二:判断人工干预任务类型
6、评估人工干预任务类型,将人工干预内容类型根据人工干预内容的性质分为功能性干预、保障性干预;
7、所述功能性干预为人干预的内容与装备完成任务直接相关;所述保障性干预为人干预的内容与装备完成任务没有直接关系,仅保障任务的顺利完成;
8、得到无人系统能够执行的任务集r,任务集r中为无人系统能够执行的nr类任务,表示为:
9、r=[1,2,...,nr,...,nr];
10、步骤三:评估人工干预模式
11、针对每项需要人工干预的任务,评估人工干预模式;
12、对于第nr个任务,根据任务需求设置干预模式系数s;干预模式系数s在[0,1]区间,系数越高,代表人干预度越高;
13、根据人操控、人决策、人确认三种人工干预模式,将s分为对应模式的系数so、sd、sc;
14、so、sd、sc均在在[0,1]区间且so>sd>sc;
15、步骤四:计算人工干预主动性
16、根据系统能否自主发现异常,设置人工干预主动性程度系数,用λ表示:
17、操控主动性越高,系数λ在[0,1]区间越接近1;
18、若人工发现异常并操控,系数λ取操控主动性系数λa;
19、若自主发现异常,系数λ取自主主动性系数λs;
20、且λa>λs;
21、步骤五:计算人工干预广度
22、人工干预广度包括装备执行任务中人员干预任务的频次、时间、子任务比例;频次比例越高、时间比例越大、子任务比例越高,则人工干预广度越大;人工干预度越高,装备自主性越低;
23、501.计算人工干预次数比例:人工干预频次是指装备执行任务时,人工干预的总次数包括人工干预操作次数、人工干预决策次数;人工干预的频次比例用fr表示,人工干预频次用fa表示,无人系统总的行为次数用sf表示,fr计算公式如下:
24、
25、502.计算人工干预时间比例:人工干预时间是指装备在执行任务过程中人工干预的时长;人工干预时间比例是指装备执行任务时,人工干预的操作时间、与任务总时间的比例;人工干预时间比例、人工干预时长、装备执行任务总时间分别用字母tr、ta及ts表示。tr计算公式如下:
26、
27、503.计算人工干预的子任务数比例:采用人工干预任务量占比作为度量指标;人工干预的子任务数比例、人工干预的子任务数、子任务数总量分别用字母wr、wa、ws表示;wr计算公式如下:
28、
29、步骤六:人工干预度综合计算
30、601.计算每个任务的人工干预度
31、每个任务的人工干预度用ia表示,子任务的权重向量为wc,人工干预度ia的公式如下所示:
32、ia=s×λ×wc(fr+tr+wr)
33、602.无人系统总的人工干预度
34、针对在不同场景、不同对象,无人系统表现出差异化的人工干预度,对于各种任务的人工干预度进行综合计算;所述任务集r=[1,2,...,nr,...,nr]对应的权重集为w=[w1,w2,…,wnr,…,wnr];每个任务的人工干预度用ia的集合为i’;无人机系统总的人工干预度is的公式如下所示:
35、is=w i’。
36、优选地,所述步骤一中,采集的交互数据包括文本、语音、动作。
37、优选地,所述步骤一中,以仿真、实物或两者结合方式进行试验。
38、优选地,所述任务集r中的任务包括发现、定位、跟踪、瞄准、打击和评估。
39、优选地,所述步骤二中,功能性干预包括人工参与目标识别,任务分配、路径规划;保障性干预包括发现异常。
40、优选地,所述干预模式系数s、人工干预主动性程度系数λ根据任务需求由专家设置;so、sd、sc及λa、λs分别由专家设置根据任务类型单独设置。
41、优选地,所述人工干预的子任务数包括人工干预识别的图片数量、人工干预任务规划路线数。
42、优选地,所述步骤五中,时间、次数、子任务比例为共同加权相加或选取其中的1-2项进行计算;所述步骤六中,从任务集r中选取若干典型场景下完成任务时的人工干预度,作为总的人工干预度,简化计算。
43、第二方面,本发明提供一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述第一方面所述的方法。
44、第三方面,本发明提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述第一方面所述的方法。
45、本发明取得的有益效果:
46、本发明以无人系统的人工干预度作为研究对象,以构建的评估环境作为仿真,能够高时效、低成本、高置信的为无人系统的人工干预度进行量化,较为准确地实现无人系统的自主性评估。
技术特征:
1.一种面向无人系统的人工干预度评估方法,其特征在于,具体包括如下步骤:
2.根据权利要求1所述的面向无人系统的人工干预度评估方法,其特征在于,所述步骤一中,采集的交互数据包括文本、语音、动作。
3.根据权利要求1所述的面向无人系统的人工干预度评估方法,其特征在于,所述步骤一中,以仿真、实物或两者结合方式进行试验。
4.根据权利要求1所述的面向无人系统的人工干预度评估方法,其特征在于,所述任务集r中的任务包括发现、定位、跟踪、瞄准、打击和评估。
5.根据权利要求1所述的面向无人系统的人工干预度评估方法,其特征在于,所述步骤二中,功能性干预包括人工参与目标识别,任务分配、路径规划;保障性干预包括发现异常。
6.根据权利要求1所述的面向无人系统的人工干预度评估方法,其特征在于,所述干预模式系数s、人工干预主动性程度系数λ根据任务需求由专家设置;所述so、sd、sc及λa、λs分别由专家设置根据任务类型单独设置。
7.根据权利要求1所述的面向无人系统的人工干预度评估方法,其特征在于,所述人工干预的子任务数包括人工干预识别的图片数量、人工干预任务规划路线数。
8.根据权利要求1所述的面向无人系统的人工干预度评估方法,其特征在于,所述步骤五中,时间、次数、子任务比例为共同加权相加或选取其中的1-2项进行计算;所述步骤六中,从任务集r中选取若干典型场景下完成任务时的人工干预度,作为总的人工干预度,简化计算。
9.一种计算机可读存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述权利要求1~8中任一项所述的方法。
10.一种电子设备,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述权利要求1~8任一项所述的方法。
技术总结
本发明涉及无人系统试验评估领域,具体涉及一种无人系统人工干预度评估方法。本发明提供一种面向无人系统的人工干预度评估方法,具体包括如下步骤:步骤一:评估数据准备;步骤二:判断人工干预任务类型;步骤三:评估人工干预模式;步骤四:计算人工干预主动性;步骤五:计算人工干预广度;步骤六:人工干预度综合计算。本发明以无人系统的人工干预度作为“研究对象”,以构建的评估环境作为“仿真”,能够高时效、低成本、高置信的为无人系统的人工干预度进行量化,较为准确地实现无人系统的自主性评估。
技术研发人员:杜琳琳,肖刚,马静静,王莹,陈维常,马琼敏,胡健伟
受保护的技术使用者:中国人民解放军军事科学院系统工程研究院
技术研发日:
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!