激光里程计的置信度优化方法、装置及电子设备、计算机程序产品与流程
本申请涉及自动驾驶,尤其涉及一种激光里程计的置信度优化方法、装置及电子设备、计算机程序产品。
背景技术:
1、目前,随着自动驾驶技术的快速发展,为了适应多场景的需求,激光里程计除了用于激光slam建图(simultaneous localization and mapping,同步定位与建图)外,也会用于激光slam定位。
2、但是在激光slam定位过程中,激光里程计存在累计误差,且会随着帧数的增加而增加,传统的匹配算法计算得到的置信度只能代表当前帧的匹配状态,而无法代表当前帧绝对误差的大小,进而无法为其他模块提供准确的参考信息。
技术实现思路
1、本申请实施例提供了一种激光里程计的置信度优化方法、装置及电子设备、计算机程序产品,以提高激光里程计的置信度计算的准确性。
2、本申请实施例采用下述技术方案:
3、第一方面,本申请实施例提供一种激光里程计的置信度优化方法,其中,所述激光里程计的置信度优化方法包括:
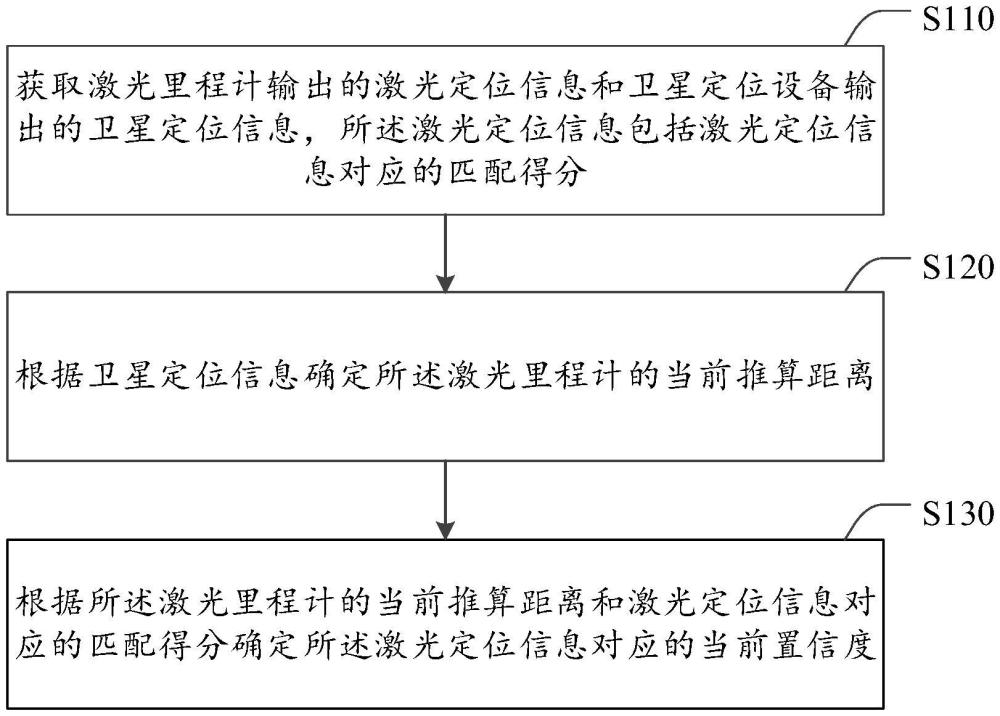
4、获取激光里程计输出的激光定位信息和卫星定位设备输出的卫星定位信息,所述激光定位信息包括激光定位信息对应的匹配得分;
5、根据卫星定位信息确定所述激光里程计的当前推算距离;
6、根据所述激光里程计的当前推算距离和激光定位信息对应的匹配得分确定所述激光定位信息对应的当前置信度。
7、可选地,所述获取激光里程计输出的激光定位信息和卫星定位设备输出的卫星定位信息包括:
8、确定所述卫星定位信息的定位状态;
9、在所述卫星定位信息的定位状态为正常状态的情况下,获取所述卫星定位设备输出的卫星定位信息。
10、可选地,所述卫星定位信息为当前帧的激光定位信息对应的卫星定位信息,所述根据卫星定位信息确定所述激光里程计的当前推算距离包括:
11、获取第一帧的激光定位信息对应的卫星定位信息;
12、根据所述第一帧的激光定位信息对应的卫星定位信息以及所述当前帧的激光定位信息对应的卫星定位信息,确定所述激光里程计的当前推算距离。
13、可选地,所述根据所述激光里程计的当前推算距离和激光定位信息对应的匹配得分确定所述激光定位信息对应的当前置信度包括:
14、根据所述激光里程计的当前推算距离计算所述激光里程计的第一置信度;
15、根据所述激光定位信息对应的匹配得分计算激光里程计的第二置信度;
16、根据所述激光里程计的第一置信度和第二置信度,计算所述激光定位信息对应的当前置信度。
17、可选地,所述根据所述激光里程计的当前推算距离计算所述激光里程计的第一置信度包括:
18、确定所述当前推算距离是否大于预设距离阈值;
19、若是,则将所述第一置信度置为0;
20、否则,则根据所述激光里程计的当前推算距离计算所述激光里程计的第一置信度。
21、可选地,所述根据所述激光里程计的第一置信度和第二置信度,计算所述激光里程计的当前置信度包括:
22、对所述激光里程计的第一置信度和第二置信度进行加权融合,得到所述激光定位信息对应的当前置信度。
23、可选地,在根据所述激光里程计的当前推算距离和激光定位信息对应的匹配得分确定所述激光定位信息对应的当前置信度之后,所述激光里程计的置信度优化方法还包括:
24、确定所述激光定位信息对应的当前置信度是否大于预设置信度阈值;
25、若是,则根据所述卫星定位信息、所述激光定位信息以及所述激光定位信息对应的当前置信度进行融合定位;
26、否则,则舍弃所述激光定位信息。
27、第二方面,本申请实施例还提供一种激光里程计的置信度优化装置,其中,所述激光里程计的置信度优化装置包括:
28、第一获取单元,用于获取激光里程计输出的激光定位信息和卫星定位设备输出的卫星定位信息,所述激光定位信息包括激光定位信息对应的匹配得分;
29、第一确定单元,用于根据卫星定位信息确定所述激光里程计的当前推算距离;
30、第二确定单元,用于根据所述激光里程计的当前推算距离和激光定位信息对应的匹配得分确定所述激光定位信息对应的当前置信度。
31、第三方面,本申请实施例还提供一种电子设备,包括:
32、处理器;以及
33、被安排成存储计算机可执行指令的存储器,所述可执行指令在被执行时使所述处理器执行前述之任一所述激光里程计的置信度优化方法。
34、第四方面,本申请实施例还提供一种计算机程序产品,包括计算机程序或指令,所述计算机程序或指令被处理器执行时实现前述之任一所述激光里程计的置信度优化方法。
35、本申请实施例采用的上述至少一个技术方案能够达到以下有益效果:本申请实施例的激光里程计的置信度优化方法,先获取激光里程计输出的激光定位信息和卫星定位设备输出的卫星定位信息,激光定位信息包括激光定位信息对应的匹配得分;然后根据卫星定位信息确定激光里程计的当前推算距离;最后根据激光里程计的当前推算距离和激光定位信息对应的匹配得分确定激光定位信息对应的当前置信度。本申请实施例的激光里程计的置信度优化方法并不单纯依赖激光里程计输出的匹配得分计算置信度,而是在此基础上,进一步考量了激光里程计当前的推算距离对于置信度计算的影响,综合计算置信度,从而提高了激光里程计的置信度计算的准确性,能够为后续其他模块提供准确、可靠的参考信息。
技术特征:
1.一种激光里程计的置信度优化方法,其中,所述激光里程计的置信度优化方法包括:
2.如权利要求1所述激光里程计的置信度优化方法,其中,所述获取激光里程计输出的激光定位信息和卫星定位设备输出的卫星定位信息包括:
3.如权利要求1所述激光里程计的置信度优化方法,其中,所述卫星定位信息为当前帧的激光定位信息对应的卫星定位信息,所述根据卫星定位信息确定所述激光里程计的当前推算距离包括:
4.如权利要求1所述激光里程计的置信度优化方法,其中,所述根据所述激光里程计的当前推算距离和激光定位信息对应的匹配得分确定所述激光定位信息对应的当前置信度包括:
5.如权利要求4所述激光里程计的置信度优化方法,其中,所述根据所述激光里程计的当前推算距离计算所述激光里程计的第一置信度包括:
6.如权利要求1所述激光里程计的置信度优化方法,其中,所述根据所述激光里程计的第一置信度和第二置信度,计算所述激光里程计的当前置信度包括:
7.如权利要求1~6任一项所述激光里程计的置信度优化方法,其中,在根据所述激光里程计的当前推算距离和激光定位信息对应的匹配得分确定所述激光定位信息对应的当前置信度之后,所述激光里程计的置信度优化方法还包括:
8.一种激光里程计的置信度优化装置,其中,所述激光里程计的置信度优化装置包括:
9.一种电子设备,包括:
10.一种计算机程序产品,包括计算机程序或指令,所述计算机程序或指令被处理器执行时实现所述权利要求1~7之任一所述激光里程计的置信度优化方法。
技术总结
本申请公开了一种激光里程计的置信度优化方法、装置及电子设备、计算机程序产品,该方法包括:获取激光里程计输出的激光定位信息和卫星定位设备输出的卫星定位信息,激光定位信息包括激光定位信息对应的匹配得分;根据卫星定位信息确定激光里程计的当前推算距离;根据激光里程计的当前推算距离和激光定位信息对应的匹配得分确定激光定位信息对应的当前置信度。本申请的激光里程计的置信度优化方法并不单纯依赖激光里程计输出的匹配得分计算置信度,而是在此基础上,进一步考量了激光里程计当前的推算距离对于置信度计算的影响,综合计算置信度,从而提高了激光里程计的置信度计算的准确性,能够为后续其他模块提供准确、可靠的参考信息。
技术研发人员:宋振伟
受保护的技术使用者:智道网联科技(北京)有限公司
技术研发日:
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!