基于事件星敏感器的动态自适应太阳逆光干扰消除方法
本发明涉及计算机视觉、逆光目标探测、最优控制等领域技术,具体地说,是一种利用事件相机进行动态自适应消除太阳逆光干扰的空间目标探测方法。
背景技术:
1、星敏感器是以恒星探测为基准实现空间导航的空间姿态敏感器,通过星图匹配完成载体的姿态测量与定位。然而,传统星敏感器在应对环境杂散光,特别是天基载荷在轨运行阶段频繁面临的太阳小角度入射的逆光场景时,其导航性能显著受限。针对逆光场景下太阳杂散光对星敏感器造成的干扰问题,现存的技术手段尚显不足。
2、传统的解决方法集中于硬件加装遮光罩以及软件后处理算法,但受限于成像效果、计算复杂度或环境适应性,在处理动态逆光杂散光的环境下的效果一般。事件相机作为一种新型的视觉传感器,与传统相机不同,仅在单位像素亮度变化超过阈值时才记录信息,为解决上述问题提供了新思路。事件相机不受绝对光照的限制,对背景强光和目标信号进行时域亮度差分,具有大动态范围、高灵敏度、高采样率、低带宽等优势,能从本质上提升逆光环境下信号采集的效率和数据质量。
3、在空间环境中,由于探测器、空间目标与太阳三者的相对位置持续变化,极端环境下当太阳进入探测器视场时,聚焦的太阳光子会引起由结漏电流主导的极高频率触发的泄露噪声事件,即便太阳未出现在视场时,其光线也会进入镜头产生无关的杂光噪声事件干扰。因此,探测器在受太阳强光干扰的逆光区运行时,对恒星目标的探测异常困难。在此背景下,事件相机动态自适应逆光干扰消除方法有望成为解决该问题的有效手段。
技术实现思路
1、本发明提供了一种基于事件星敏感器的动态自适应太阳逆光干扰消除方法,主要解决了空间探测器在面对太阳逆光条件下,无法准确预测逆光角并有效抑制由此产生的噪声干扰的问题。通过此方法能够根据实时环境数据调整事件触发阈值,优化探测器在面对复杂光照变化时的性能。
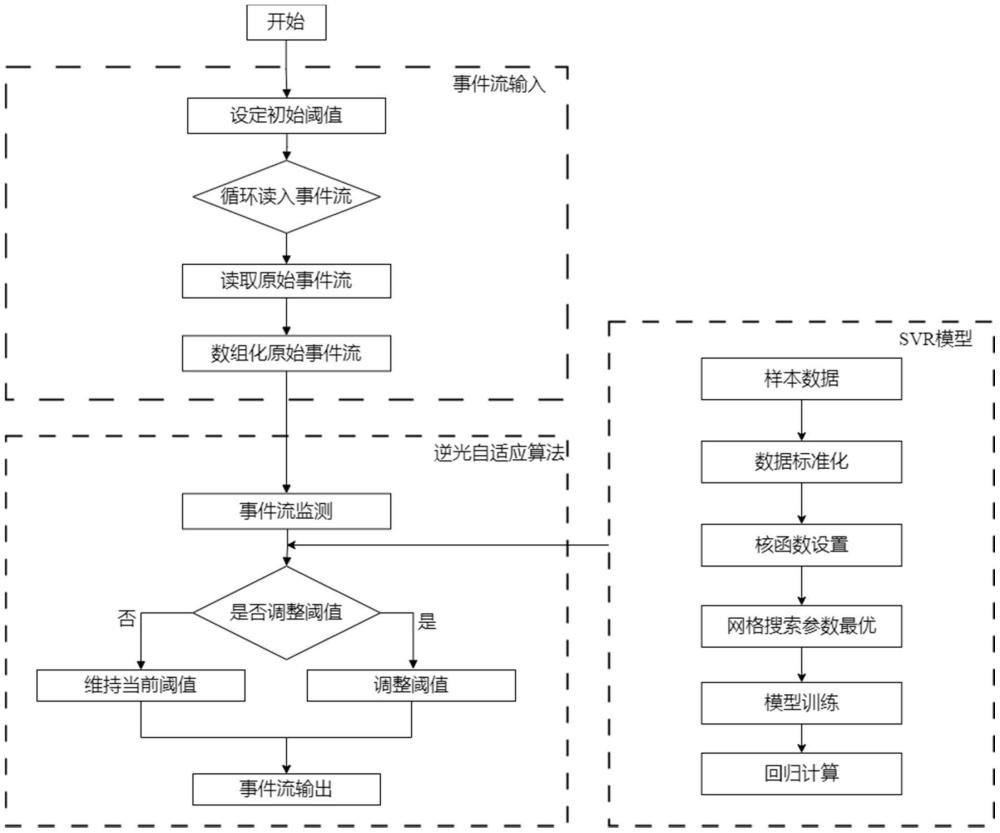
2、实现本发明目的的技术解决方案为:一种基于事件星敏感器的动态自适应太阳逆光干扰消除方法,该方法包括如下步骤:
3、步骤(1):构建基于svr的逆光角预测模型,定义逆光角度和事件触发阈值,采集不同逆光角度下对应的事件量数据作为训练集样本训练模型;
4、步骤(2):利用roc曲线评估步骤(1)训练集中不同阈值下系统的检测性能,针对每个逆光角度,找出对应的最优事件触发阈值;
5、步骤(3):定义固定时间窗口,循环读入事件流,计算事件率并读取当前硬件阈值参数;
6、步骤(4):将步骤(3)收集到的事件率数据和硬件阈值参数作为输入,送入预训练好的svr模型,预测当前设备采集的逆光角度,根据预测结果对应步骤(2)中预先评估的roc曲线,动态调整合适的阈值参数并回调。
7、本发明与现有技术相比,其显著优点在于:本发明提出了一种基于事件星敏感器的动态自适应太阳逆光干扰消除方法,该方法:(1)采用基于事件的传感器,利用了事件相机仅敏感光强变化,不受绝对光照的限制,高动态范围和高时间分辨率等优势,从本质上提升逆光环境下信号采集的效率和质量;(2)采用基于svr的逆光角预测模型,利用了svr优异的泛化能力,能够在数据存在较大噪声时仍保持较高的预测准确率;(3)采用roc曲线设计阈值优化策略,为每种逆光角度条件确定了最优阈值,结合svr模型得以根据实时环境数据动态自适应调整事件触发阈值,优化探测器在面对复杂光照变化时的性能。
技术特征:
1.一种基于事件星敏感器的动态自适应太阳逆光干扰消除方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的基于事件星敏感器的动态自适应太阳逆光干扰消除方法,其特征在于,步骤(1)具体包括如下步骤:
3.根据权利要求1所述的基于事件星敏感器的动态自适应太阳逆光干扰消除方法,其特征在于,对步骤(2)中每个逆光角度下不同阈值的训练集数据,在唯一逆光角度下,对每个阈值下的数据统计真阳率tpr与假阳率fpr,统计所有逆光角度下不同阈值的tpr与fpr,打点绘制不同角度下的roc曲线;对于每个逆光角,最优阈值对应roc曲线中最接近左上角的点,即最小化时的点,该点对应的阈值即该逆光角度下的最优阈值。
4.根据权利要求1所述的基于事件星敏感器的动态自适应太阳逆光干扰消除方法,其特征在于,步骤(3)具体包括如下步骤:
技术总结
本发明公开了一种基于事件星敏感器的动态自适应太阳逆光干扰消除方法,主要解决空间探测器在面对太阳逆光条件下,无法准确预测逆光角并有效抑制由此产生的噪声干扰的问题。首先,通过支持向量回归(SVR)模型建立不同逆光角下阈值与事件率的关系;其次,利用接收者操作特征(ROC)曲线衡量不同逆光角下的最佳阈值;最后,基于对单位时间窗口内的事件流特性分析,通过SVR模型估计逆光角度并自适应调整响应阈值。实现了动态环境下对逆光干扰的有效消除。在非直射逆光的环境下,本发明所设计的方法成功实现了在保障探测精度的同时,有效抑制无关光噪声,减少事件处理成本,具有较高的实用价值。
技术研发人员:蔡玮,张冬琳,朱立华,朱虹宇
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2025/2/5
- 还没有人留言评论。精彩留言会获得点赞!