一种基于深度学习的极柱焊前寻址方法
本发明属于自动化焊接,尤其涉及一种基于深度学习的极柱焊前寻址方法。
背景技术:
1、因为清洁绿色能源的快速发展,新能源汽车产业不断扩大。对于此,我国对动力电池的需求和要求也迅猛增长。新能源汽车产业的核心技术是动力电池技术,它的质量直接影响了新能源汽车的性能。为了确保汽车动力供给的稳定可靠,需要提高动力电池组生产环节中电池组极柱间的焊接质量。
2、提高极柱间的焊接质量,需要准确定位极柱的焊接区域,在固定的范围内进行精准焊接。定位错误可能导致焊偏、气孔、咬边等缺陷,降低电池的导电性能,造成材料的耗费。传统的视觉检测方法难以适应快速高效的生产环境,对生产环境的要求也相对较高。
3、专利文献cn114571073a公开了一种激光焊接视觉定位引导方法、系统,装置及介质,包括如下步骤:步骤一:产品模组到位;步骤二:获取极柱寻址数据,伺服带相机拍标注点来定位坐标;步骤三:极柱寻址数据转换为当前相机坐标系下的极柱坐标;步骤四:极柱坐标减去机器人焊接坐标,得到极柱相对激光器坐标;步骤五:相对坐标转换为激光焊接坐标;步骤六:焊接坐标发送plc,引导激光焊接。
4、专利文献cn117086480a公开了一种基于视觉引导的电池模组激光焊接方法及系统方法,包括:步骤s1、plc控制转运小车将模组移至侧板焊接工位;步骤s2、对模组进行顶升、除尘并开启氮气保护;步骤s3、通过相机和测距仪对模组内的侧板进行视觉定位以及测距之后,控制六轴机器人移动焊接压嘴以对侧板焊接;步骤s4、对极柱进行视觉定位以及测距后,将连接片移栽到极柱上,将转运小车移至连接片焊接工位;步骤s5、对模组进行顶升、除尘并开启氮气保护;步骤s6、对电池模组进行视觉定位以及测距之后,控制六轴机器人移动振镜以对连接片焊接。
5、上述技术方案中,要求焊接目标必须完全暴露在相机视野范围内,每次对整张图像处理耗时相对更大,焊接环境中的微小变化容易影响图像处理的效果,从而影响到后续的极柱坐标数据提取。
技术实现思路
1、本发明的目的在于提供一种基于深度学习的极柱焊前寻址方法,该方法能实现极柱焊前实时寻址的目的。
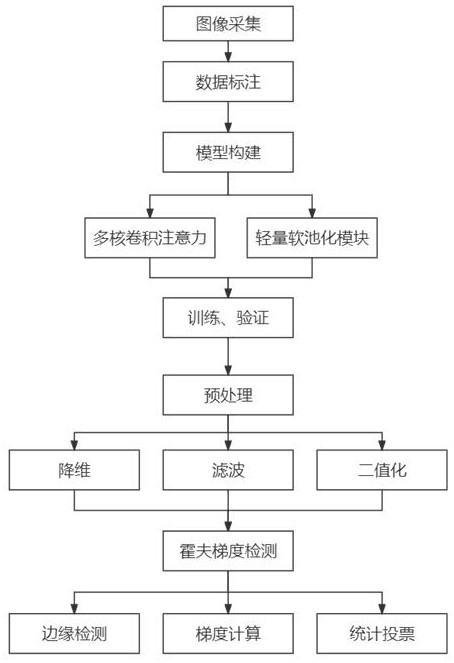
2、为了实现本发明的目的,提供如下技术方案:一种基于深度学习的极柱焊前寻址方法,包括以下步骤:
3、获取动力电池图像,并对动力电池图像中的极柱以及极柱信息进行标签标注,将动力电池图像和标签组成数据集;
4、基于yolox检测模型框架和轻量化池化方法构建识别网络,所述识别网络包括特征提取模块和多核卷积注意力模块:
5、所述特征提取模块包括多尺度特征提取器,所述多尺度特征提取器用于提取多个尺度下电池图像中极柱位置的特征图像;
6、所述多核卷积注意力模块,通过轻量化池化方法对多个尺度的特征图像进行下采样,并将采样获得的采样特征从通道维度进行拼接,以获得总体特征图作为极柱感兴趣图像进行输出;
7、利用训练集对所述识别网络进行训练,以获得用于提取极柱感兴趣图像的识别模型;
8、将动力电池图像输入至识别模型中,以获得极柱感兴趣图像,并对所述极柱感兴趣图像进行降维处理,以获得对应的灰度图;
9、基于预构建的高斯滤波器对所述灰度图进行卷积操作,以输出仅包括0和255像素值的二值化图像,并利用形态学方法对二值化图像中的黑色区域进行填补;
10、利用霍夫梯度圆检测方法对填补后的二值化图像进行圆心定位与圆周识别,以获得极柱焊接区域的坐标。
11、本发明将卷积网络模型引入焊前寻址方法中,削弱了焊接目标找寻对于相机视野的依赖性,同时采用了多核卷积注意力对目标图像进行特征加强,用轻量软池化模块加速目标的检测和定位。将霍夫梯度方法与神经网络模型相结合实现检测定位一体实现,用于快速获取更高精度的极柱坐标。
12、具体的,所述极柱信息包括图像id、图像路径、图像名称、图像的像素高度及宽度,其中,像素高度及宽度图像通过一个矩形框的四个坐标表示。
13、具体的,利用ccd相机从多个不同角度拍摄大量的动力电池图像,包括各种复杂环境下的动力电池图像,图像中的动力电池极柱数目是变化的,确保有多目标的数据集;
14、使用labelimg工具标注动力电池极柱图像,为每一幅图像创建对应的标签文件,对应的标签文件中含有极柱的类别标签,类别标签为battery pole,标签文件满足pascalvoc格式的xml标签文件标准;
15、按照8:1:1的比例将所述电池最终数据集划分为训练集、验证集和测试集。
16、具体的,所述多尺度特征提取器包括3×3特征提取器、5×5特征提取器和7×7特征提取器。
17、具体的,所述多核卷积注意力模块的输出结果表达式如下:;;其中w和b表示全连接层的权重和偏置参数,表示激活函数,表示最终输出结果的可学习权重表示,表示拼接获得的总体特征图。
18、具体的,所述轻量化池化方法的操作过程如下:设定池化的内核大小为k,该k×k区域定义为r,称为池化窗口,对每个池化窗口内的特征值进行线性变换来计算权重,采用线性权重替换原结构软池化中的指数权重,其权重表示为:;对线性变换后的权重进行归一化处理,以得到权重的分布情况,表示为:;使用权重对特征值进行加权求和,得到轻量化软池化的结果,表示为:;其中,表示可学习的偏置项,表示待下采样的特征图像。
19、具体的,在训练过程中,设置参数batch_size为16,使用动量为0 .9的随机梯度下降,初始学习率设置为0.01,并采用余弦学习率不断调整训练次数和学习率。
20、具体的,所述高斯滤波器的卷积操作具体如下:
21、针对图像中的每个像素,选取当前像素及其多个邻居像素,根据多个邻居像素距离当前像素的远近,分配不同的权重进行加权替换当前像素的值,并根据目标的颜色特性选择固定阈值进行二值化,以获得二值化图像。
22、具体的,所述霍夫梯度圆检测方法的具体过程如下:
23、获取图像中所有的边缘,并确定每个边缘的法线方向;
24、针对图像中每个像素设置累加器,以边缘上的边缘点为起点,根据对应的法线正负方向进行双向延长,并对延长线相加的像素点进行投票,增加累加器中的计数值;
25、当所有边缘点都投票完成,获取累加器中计数值最高的像素坐标,完成极柱的中心点定位和圆周识别。
26、具体的,所述法线方向的确定采用水平和垂直两个方向对图像中每个像素点的x和y方向进行卷积计算,获得梯度幅度和梯度方向作为结果输出。
27、与现有技术相比,本发明的有益效果:
28、利用一种关注多尺度信息进行注意力权重推断的多核卷积注意力模块强化所获数据集中的细节特征,利用一种轻量的软池化方法在保证池化能力的基础上简化了权重计算,并同时保证了特征可微,可用于反向梯度传递,从而结合卷积网络模型实现极柱的焊前寻址定位。
技术特征:
1.一种基于深度学习的极柱焊前寻址方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于深度学习的极柱焊前寻址方法,其特征在于,所述极柱信息包括图像id、图像路径、图像名称、图像的像素高度及宽度,其中,像素高度及宽度图像通过一个矩形框的四个坐标表示。
3.根据权利要求1所述的基于深度学习的极柱焊前寻址方法,其特征在于,所述多尺度特征提取器包括3×3特征提取器、5×5特征提取器和7×7特征提取器。
4.根据权利要求1所述的基于深度学习的极柱焊前寻址方法,其特征在于,所述多核卷积注意力模块的输出结果表达式如下:;;其中w和b表示全连接层的权重和偏置参数,表示激活函数,表示最终输出结果的可学习权重表示,表示拼接获得的总体特征图。
5.根据权利要求1所述的基于深度学习的极柱焊前寻址方法,其特征在于,所述轻量化池化方法的操作过程如下:
6.根据权利要求1所述的基于深度学习的极柱焊前寻址方法,其特征在于,在训练过程中,设置参数batch_size为16,使用动量为0 .9的随机梯度下降,初始学习率设置为0.01,并采用余弦学习率不断调整训练次数和学习率。
7.根据权利要求1所述的基于深度学习的极柱焊前寻址方法,其特征在于,所述高斯滤波器的卷积操作具体如下:
8.根据权利要求1所述的基于深度学习的极柱焊前寻址方法,其特征在于,所述霍夫梯度圆检测方法的具体过程如下:
9.根据权利要求8所述的基于深度学习的极柱焊前寻址方法,其特征在于,所述法线方向的确定采用水平和垂直两个方向对图像中每个像素点的x和y方向进行卷积计算,获得梯度幅度和梯度方向作为结果输出。
技术总结
本发明公开了一种基于深度学习的极柱焊前寻址方法,包括以下步骤:获取动力电池图像并进行标签标注,以组成数据集;基于yolox检测模型框架和轻量化池化方法构建识别网络,所述识别网络包括特征提取模块和多核卷积注意力模块;利用数据集对识别网络进行训练,以获得识别模型;将动力电池图像输入至识别模型中以获得极柱感兴趣图像,并进行降维处理以获得灰度图;基于高斯滤波器对灰度图进行卷积操作,以输出二值化图像,并对二值化图像中的黑色区域进行填补;对填补后的二值化图像进行圆心定位与圆周识别,以获得极柱焊接区域的坐标。本发明提供的方法能实现极柱焊前实时寻址的目的。
技术研发人员:方灶军,田红玲
受保护的技术使用者:中国科学院宁波材料技术与工程研究所
技术研发日:
技术公布日:2025/1/13
- 还没有人留言评论。精彩留言会获得点赞!