一种基于线结构光点集单体化运动学标定的三维重建方法
本发明涉及三维重建领域,尤其涉及一种基于线结构光点集单体化运动学标定的三维重建方法。
背景技术:
1、随着我国制造业的迅猛发展,针对复杂工件的高精密检测要求日益提高。线结构光与五轴运动平台结合可以实现多位姿扫描及点云模型重建,从而完成复杂工件的检测任务。但由于制造和装配误差,五轴运动平台的实际结构与理论结构往往存在一定偏差,影响其定位精度。而由于线结构光重建精度与平台结构相关联,因此,先经过运动学标定提升平台精度后,再通过线结构光扫描获得点云,并对点云进行即时校准,能够提升线结构光多位姿扫描系统的三维重建精度。
2、运动学标定是一种用于补偿平台几何误差、提高其绝对精度的方法。现有运动学标定方法通常需要依赖激光跟踪仪等昂贵设备,采集其多轴运动位姿信息,标定成本高,且存在观测数据不足的问题。另外,线结构光多位姿三维重建精度不仅与平台定位精度相关,还受点云位置精度影响,现有方法通常未考虑线结构光所测点云的即时校准,导致线结构光多位姿扫描系统的三维重建精度不足。
技术实现思路
1、有鉴于此,为了解决现有线结构光多位姿扫描系统的三维重建难题,本发明提出一种基于线结构光点集单体化运动学标定的三维重建方法,所述方法包括以下步骤:
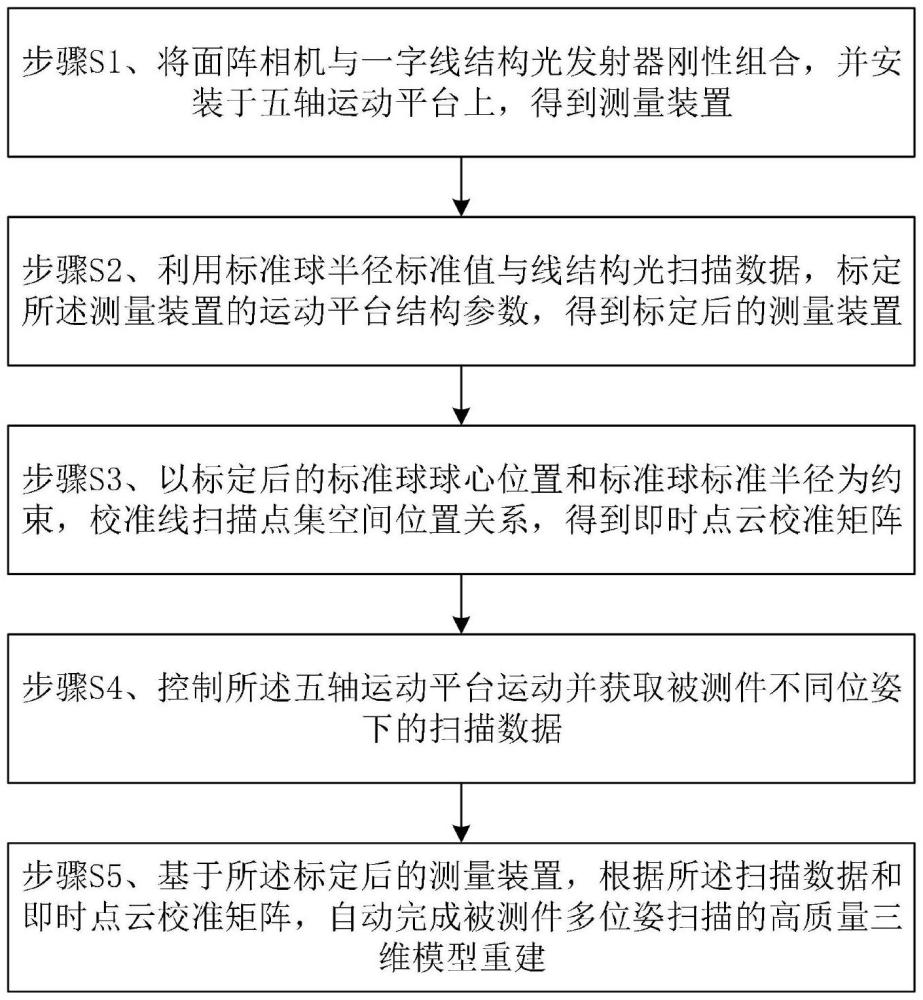
2、将面阵相机与一字线结构光发射器刚性组合,并安装于五轴运动平台上,得到测量装置;
3、利用标准球半径标准值与线结构光扫描数据,标定所述测量装置的运动平台结构参数,得到标定后的测量装置;
4、以标定后的标准球球心位置和标准球标准半径为约束,校准线扫描点集的空间位置关系,得到即时点云校准矩阵;
5、控制所述五轴运动平台运动并获取标准球不同位姿下的扫描数据;
6、基于所述标定后的测量装置,根据所述扫描数据和即时点云校准矩阵,自动完成被测件多位姿扫描的高质量三维模型重建。
7、本实施例的有益效果为:利用一字线结构光发射器与相机组合,实现非接触式三维视觉测量,无需使用激光跟踪仪,降低了标定成本;并且,由于线结构光三维扫描系统可以通过控制平台运动而采集到密集点云,同时,所有点云都可以直接参与运动平台结构参数标定,使标定所需的观测数据量得到了大幅提升,提高误差参数的辨识精度。
8、此外,若测量装置已标定,则跳过标定步骤。
9、在一些实施例中,所述利用标准球半径标准值与线结构光扫描数据,标定所述测量装置的运动平台结构参数,得到标定后的测量装置这一步骤,其具体包括:
10、将标准球固定于五轴运动平台末端法兰中心;
11、控制所述五轴运动平台运动,并获取标准球不同位姿下的扫描数据;
12、根据五轴运动平台各轴对末端的影响构建运动学模型和运动学误差模型,并确定误差参数项;
13、解算末端坐标系下的球面弧线点云并取多帧点云拟合球心,得到初始球心位置;
14、根据所述球面弧线点云三维信息、初始球心位置和标准球标准半径构建目标函数;
15、基于所述目标函数,将所述所有球面弧线点集单体化后直接参与误差辨识,完成运动平台结构参数标定,得到标定后的测量装置。
16、本实施例的有益效果在于,利用平移轴与旋转轴各运动平台结构参数对标准球测量球心以及测量半径产生的影响,尽量减小了线结构光光平面解算误差带来的干扰,可兼顾平移轴与旋转轴的标定,同时,所有扫描所得球面弧线点集单体化后可直接参与误差辨识,最终确保误差参数项辨识结果准确,从而提升平台运动精度及三维点云模型重建精度。
17、在一些实施例中,所述基于所述标定后的测量装置,利用所述扫描数据和所述即时点云校准矩阵,完成被测件多位姿扫描的高质量三维模型重建这一步骤,其具体包括:
18、基于所述标定后的测量装置,根据相机内参矩阵和相机坐标系下的光平面方程,解算出相机坐标系下线结构光条纹中心点的三维信息;
19、结合手眼变换矩阵、标定后的运动学逆变换矩阵和即时点云校准矩阵,将各位姿下的扫描数据转换至末端坐标系下。
20、本实施例的有益效果在于,利用经过运动学标定的标准球球心位置,可实现线扫描点集空间位置关系的校准,使得系统检测精度得到进一步提升。使线结构光系统与运动学标定后的多轴运动平台配合,可对复杂工件进行多方位扫描并通过运动关系将各帧点云转换到同一坐标系下,自动实现复杂工件多方位扫描点云模型的高质量完整形貌重建。
21、本发明还提出了一种三维重建系统,所述系统包括:
22、装置固定模块,用于将面阵相机与一字线结构光发射器刚性组合,并安装于五轴运动平台上,得到测量装置;
23、标定模块,利用标准球半径标准值与线结构光扫描数据,标定所述测量装置的运动平台结构参数,得到标定后的测量装置;
24、点云校准模块,以标定后的标准球球心位置和标准球标准半径为约束,校准线扫描点集的空间位置关系,得到即时点云校准矩阵;
25、扫描模块,用于控制所述五轴运动平台运动并获取被测件不同位姿下的扫描数据;
26、点云重建模块,基于所述标定后的测量装置,根据所述扫描数据和即时点云校准矩阵,自动完成被测件多位姿扫描的高质量三维模型重建。
27、基于上述方案,本发明提供了一种基于线结构光点集单体化运动学标定的三维重建方法,将线结构光与五轴平台相结合,利用标定后的五轴平台与三维点云进行被测工件整体形貌的三维重建,在保障了平台的运动精度、线扫描点集的绝对精度的同时,提升了线结构光多位姿三维点云模型的重建精度。
技术特征:
1.一种基于线结构光点集单体化运动学标定的三维重建方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种基于线结构光点集单体化运动学标定的三维重建方法,其特征在于,所述利用标准球半径标准值与线结构光扫描数据,标定所述测量装置的运动平台结构参数,得到标定后的测量装置这一步骤,其具体包括:
3.根据权利要求2所述一种基于线结构光点集单体化运动学标定的三维重建方法,其特征在于,所述运动学模型表示如下:
4.根据权利要求2所述一种基于线结构光点集单体化运动学标定的三维重建方法,其特征在于,所述目标函数表示如下:
5.根据权利要求4所述一种基于线结构光点集单体化运动学标定的三维重建方法,其特征在于,所述末端坐标系下的球面弧线点云的转换公式如下:
6.根据权利要求2所述一种基于线结构光点集单体化运动学标定的三维重建方法,其特征在于,取多帧不共线的球面弧线点云数据拟合球心。
7.根据权利要求2所述一种基于线结构光点集单体化运动学标定的三维重建方法,其特征在于,所述基于所述标定后的测量装置,利用所述扫描数据和所述即时点云校准矩阵,完成被测件多位姿扫描的高质量三维模型重建这一步骤,其具体包括:
8.一种三维重建系统,其特征在于,用于执行如权利要求1所述的基于线结构光点集单体化运动学标定的三维重建方法,包括:
技术总结
本发明公开了一种基于线结构光点集单体化运动学标定的三维重建方法,该方法包括:将面阵相机与一字线结构光发射器刚性组合,并安装于运动平台上;利用标准球半径标准值与线结构光扫描数据,标定测量装置的运动平台结构参数;以标定后的标准球球心位置和标准球标准半径为约束,校准线扫描点集的空间位置关系;控制五轴运动平台运动并获取被测件不同位姿下的扫描数据;利用扫描数据和即时点云校准矩阵,完成被测件多位姿扫描的高质量三维模型重建。该系统包括:装置固定模块、标定模块、点云校准模块、扫描模块和点云重建模块。通过使用本发明,能够提升线结构光三维点云模型的重建精度。本发明可广泛应用于三维重建领域。
技术研发人员:高健,钟伟滨,郑卓鋆,刘鑫,张揽宇,陈新
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2025/1/16
- 还没有人留言评论。精彩留言会获得点赞!