一种人工智能机器人的多任务调度方法和装置与流程
本发明属于智能机器人,尤其涉及一种人工智能机器人的多任务调度方法和装置。
背景技术:
1、随着人工智能技术的发展,智能机器人已经被应用于各种场景下,但现有的智能机器人只能机械的根据用户的搜索请求提供相应的服务,无法根据用户的历史数据或智能分析数据为其提供有针对性的服务。
技术实现思路
1、本发明的目的在于提供一种人工智能机器人的多任务调度方法和装置,以解决现有技术中无法根据用户的历史数据或智能分析数据为其提供有针对性的服务的技术问题。
2、一种人工智能机器人的多任务调度方法,该方法包括:
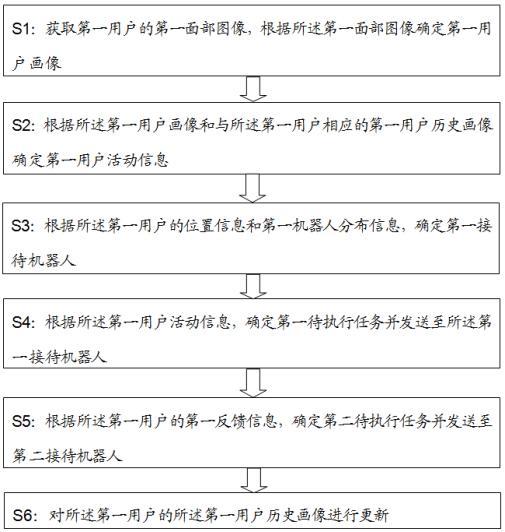
3、s1:获取第一用户的第一面部图像,根据所述第一面部图像确定第一用户画像;
4、所述s1包括如下子步骤:
5、s11:获取第一用户的第一面部图像,根据所述第一用户的第一行为信息,判断所述第一用户是否有同行用户,若有则转至s12,否则转至s13;
6、s12:获取第一人群的第一人群图像,所述第一人群包括所述第一用户;
7、s13:根据所述第一面部图像和/或所述第一人群图像,确定所述第一用户画像;
8、s2:根据所述第一用户画像和与所述第一用户相应的第一用户历史画像确定第一用户活动信息;
9、s3:根据所述第一用户的位置信息和第一机器人分布信息,确定第一接待机器人;
10、所述s3包括如下子步骤:
11、s31:根据第一机器人分布信息,确定与所述第一用户距离在预设距离范围之内的若干第一备选机器人;
12、s32:根据若干所述第一备选机器人的第一工作状态信息,确定第一接待机器人;
13、s4:根据所述第一用户活动信息,确定第一待执行任务并发送至所述第一接待机器人;
14、s5:根据所述第一用户的第一反馈信息,确定第二待执行任务并发送至第二接待机器人;
15、s6:对所述第一用户的所述第一用户历史画像进行更新。
16、优选的,所述s11包括如下子步骤:
17、s111:获取所述第一用户的第一面部图像;
18、s112:获取所述第一用户的第一行为信息,所述第一行为信息包括若干图像帧;
19、s113:将所述第一行为信息输入至同行判别模型中,从而判断出所述第一用户是否有同行用户。
20、优选的,所述s13包括如下子步骤:
21、s130:若存在同行用户,则转至s131,否则转至s134;
22、s131:根据所述第一人群图像确定第一人数信息和若干第二面部图像;
23、s132:在若干所述第二面部图像中,将预设年龄段范围内的任意一个用户重新认定为第一用户,将重新认定后的所述第一用户的面部图像作为更新后的第一面部图像;
24、s133:将所述第一人数信息、所述更新后的第一面部图像以及若干所述第二面部图像输入至第一用户画像预测模型中,以输出所述第一用户画像;
25、s134:将所述第一用户的所述第一面部图像输入至第二用户画像预测模型中,以输出所述第一用户画像。
26、优选的,所述s2包括如下子步骤:
27、s21:判断所述第一用户是否为历史用户,若是则转至s22,否则转至s25;
28、s22:提取与所述第一用户相对应的第一用户历史画像,计算所述第一用户画像与第一用户历史画像的相似度,若相似度大于预设值则转至s23,否则转至s24;
29、s23:根据所述第一用户历史画像确定第一用户活动信息,转至s26;
30、s24:将所述第一用户画像和所述第一用户历史画像输入第一用户行为预测模型中,以确定第一用户活动信息,转至s26;
31、s25:将所述第一用户画像输入第二用户行为预测模型中,以确定第一用户活动信息,转至s26;
32、s26:结束。
33、优选的,所述s4包括如下子步骤:
34、s41:将所述第一用户活动信息和所述第一用户画像输入至用户活动预测模型中,从而确定出a个第一待执行任务;
35、s42:确定与所述第一待执行任务相对应的第一活动位置,将所述第一活动位置和所述第一待执行任务发送至所述第一接待机器人;
36、其中,a为大于0的自然数。
37、优选的,所述s5包括如下子步骤:
38、s51:所述第一接待机器人根据所述第一机器人分布信息和所述第一活动位置,将每个所述第一待执行任务分别发送给相应的第二接待机器人;
39、s52:根据所述第一用户向所述第二接待机器人发送的第一反馈信息,确定第二待执行任务;
40、s53:由云服务器将所述第二待执行任务发送至所述第二接待机器人。
41、本申请还提出了一种人工智能机器人的多任务调度系统,用于实现上述一种人工智能机器人的多任务调度方法,包括:
42、第一用户画像获取模块,用于获取第一用户的第一面部图像,根据所述第一面部图像确定第一用户画像;
43、第一用户活动信息确定模块,用于根据所述第一用户画像和与所述第一用户相应的第一用户历史画像确定第一用户活动信息;
44、第一接待机器人确定模块,用于根据所述第一用户的位置信息和第一机器人分布信息,确定第一接待机器人;
45、第一待执行任务确定模块,用于根据所述第一用户活动信息,确定第一待执行任务并发送至所述第一接待机器人;
46、第二待执行任务确定模块,用于根据所述第一用户的第一反馈信息,确定第二待执行任务并发送至第二接待机器人;
47、第一用户历史画像更新模块,用于对所述第一用户的所述第一用户历史画像进行更新。
48、本申请提出的一种人工智能机器人的多任务调度方法和装置,根据出行规模将所述第一用户的出行分为单独出行和人群出行,当第一用户与历史用户的匹配度满足预设要求时,根据第一用户历史画像获取第一用户活动信息,针对人群出行方式,结合第一用户图像和第一人群图像以获得第一用户画像,可使得所述第一用户画像更好的刻画出人群出行喜好,在任务派发时,结合机器人的实时位置和第一用户的反馈信息进行任务实时更新,可使机器人的服务更符合用户需求。通过本申请提出的一种人工智能机器人的多任务调度方法和装置,可使得机器人的服务更符合用户的实际需要。
技术特征:
1.一种人工智能机器人的多任务调度方法,其特征在于,该方法包括:
2.根据权利要求1所述的一种人工智能机器人的多任务调度方法,其特征在于,所述s11包括如下子步骤:
3.根据权利要求2所述的一种人工智能机器人的多任务调度方法,其特征在于,所述s13包括如下子步骤:
4.根据权利要求3所述的一种人工智能机器人的多任务调度方法,其特征在于,所述s2包括如下子步骤:
5.根据权利要求4所述的一种人工智能机器人的多任务调度方法,其特征在于,所述s4包括如下子步骤:
6.根据权利要求5所述的一种人工智能机器人的多任务调度方法,其特征在于,所述s5包括如下子步骤:
7.一种人工智能机器人的多任务调度系统,用于实现权利要求1中的一种人工智能机器人的多任务调度方法,包括:
技术总结
本申请提出的一种人工智能机器人的多任务调度方法和装置,根据出行规模将所述第一用户的出行分为单独出行和人群出行,当第一用户与历史用户的匹配度满足预设要求时,根据第一用户历史画像获取第一用户活动信息,针对人群出行方式,结合第一用户图像和第一人群图像以获得第一用户画像,可使得所述第一用户画像更好的刻画出人群出行喜好,在任务派发时,结合机器人的实时位置和第一用户的反馈信息进行任务实时更新,可使机器人的服务更符合用户需求。通过本申请提出的一种人工智能机器人的多任务调度方法和装置,可使得机器人的服务更符合用户的实际需要。
技术研发人员:高峰,刘保腾,周奎志
受保护的技术使用者:天津市品茗科技有限公司
技术研发日:
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!