一种基于二元不平衡方法的组团出入口检测方法
本发明涉及组团出入口检测,尤其是涉及一种基于二元不平衡方法的组团出入口检测方法。
背景技术:
1、在组团式封闭社区中,住宅区又被细分为多个住宅组团。这些组团整体用有形的障碍物围挡起来,形成相对独立的部分,并配置独立的出入口、内部道路和绿地等设施。这种设计模式确保了只有经过授权的人员才能进入组团内部,可以有效地减少社区内的安全隐患,确保居民的生活安全。因此社区精细道路网包括道路,此外由于社区独特的组团结构,作为道路网特殊结点的组团出入口对于道路的连通性至关重要。确定组团出入口的位置和社区内的道路对于很多基于位置的服务至关重要。然而主流地图供应商,如百度、高德地图缺失组团出入口信息,城市社区精细导航地图不完善,严重影响社区微尺度路径规划的准确性和行人的导航体验。
2、组团出入口的表现形式通常是以门的方式呈现。门检测方法主要分为两类:基于2d图像的方法和基于3d对象的方法。基于2d图像的方法主要利用图像中门的属性(如门的颜色、尺寸、形状、朝向、纹理等)和与周围环境的差异(如门与地板之间的间隙以及消失点)构造特征空间,然后应用分类算法来判断门的位置。然而它们依赖于街道级别的图像,这些方法在处理社区内部的组团出入口受到限制,因为组团出入口通常不像街道上的门那样容易观察和识别。基于3d对象的方法主要受到3d数据在理解室内环境结构上具有重要价值的启发。这类方法主要利用激光雷达等传感器来获取室内环境的3d数据,通过分析数据来检测门。然而,对于室外环境下组团出入口的检测,情况就变得复杂得多。组团出入口的形状更多样,很多室内环境门的结构假设并不适合用于室外环境下组团出入口的检测。其次,室外环境下的门检测还需要考虑更多的因素,如天气、光照、风速等。这些因素会对传感器信号产生干扰,影响检测的准确性和稳定性。
3、因此,实有必要设计一种基于二元不平衡方法的组团出入口检测方法,以克服上述问题。
技术实现思路
1、为了避免上述问题,提供了一种基于二元不平衡方法的组团出入口检测方法,利用组团的结构特性以及空间上下文特征以精确地推导和定位组团出入口的位置信息,提升社区微尺度路径规划的准确性,优化行人的导航体验。
2、本发明提供的一种基于二元不平衡方法的组团出入口检测方法,包括如下步骤:
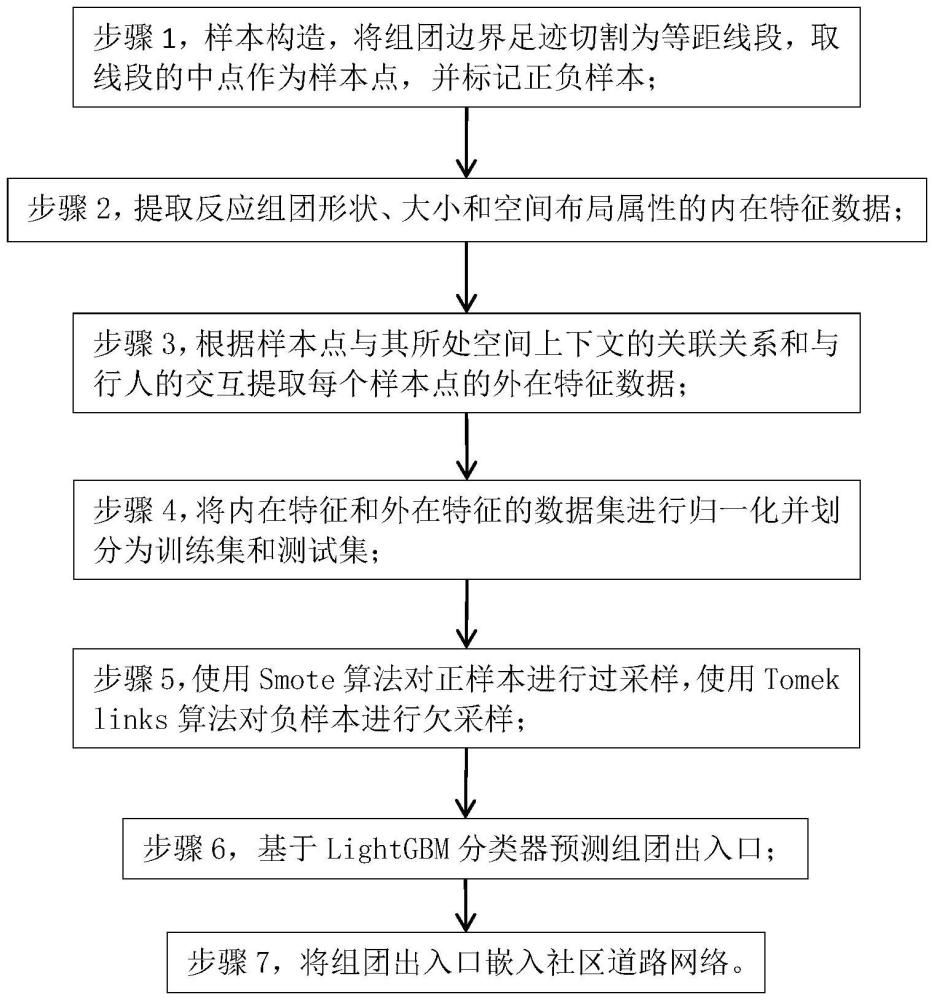
3、步骤1,样本构造,将组团边界足迹切割为等距线段,取线段的中点作为样本点,并标记正负样本;
4、步骤2,提取反应组团形状、大小和空间布局属性的内在特征数据;
5、步骤3,根据样本点与其所处空间上下文的关联关系和与行人的交互提取每个样本点的外在特征数据;
6、步骤4,将内在特征和外在特征的数据集进行归一化并划分为训练集和测试集;
7、步骤5,使用smote算法对正样本进行过采样,使用tomek links算法对负样本进行欠采样;
8、步骤6,基于lightgbm分类器预测组团出入口;
9、步骤7,将组团出入口嵌入社区道路网络。
10、优选地,步骤1中包含真正出入口的线段对应的样本点标记为正样本,其余样本点被标记为负样本。
11、优选地,步骤2中,内在特征是针对每个样本点从组团的自身结构特性定义,包括:面积、周长、凹凸性、到质心的距离、占比、主边长度、对称轴、到对称轴的长度。
12、优选地,步骤3中,外在特征包括住宅数量、到道路的最短距离、到住宅楼栋的平均距离、到住宅楼栋的最短距离、转弯度、是否有道路穿过、轨迹密度、组团内外轨迹密度比、磁通量以及各个方位的磁通量。
13、优选地,步骤5中,首先,使用smote算法对正样本进行过采样来增加正样本的数量,并剔除在空间上与正样本在物理距离上接近的负样本,两个样本之间的物理距离为沿着组团足迹的最短线性距离;然后,使用tomek links算法对负样本进行欠采样,并剔除与正样本在特征距离上相近的负样本来得到平衡的数据集;
14、在本方法解决的问题中,正样本为少数类样本,负样本为多数类样本。其中,具体生产新样本的过程:为每个少数类样本xi找到k个最近邻居,从这些邻居中随机选择样本xk,使用插值理论生成一个新的样本,公式为:xnew=xi+rand(0,1)*(xi-xk);
15、tomek links算法定义了一对具有最小欧几里得距离的邻居样本(xi,xj),其中xi属于少数类样本,xj属于多数类样本,i为1至i,i为正样本个数,j为1至j,j为负样本个数;令d(xi,xj)表示xi和xj之间的欧几里得距离;如果存在一个样本xk满足以下条件:d(xi,xk)<d(xi,xj)或d(xj,xk)<d(xi,xj),则(xi,xj)是一对tomek link。
16、优选地,使用准确率、精确率、召回率和f1分数对lightgbm分类器预测结果进行评价。
17、优选地,步骤7中包括基于控制点的路网校正与路网形态调整两个步骤:
18、7.1将组团出入口位置作为控制点对路网校正:首先,通过比较控制点的坐标与路网数据中对应位置的坐标,计算出校正参数;然后,将计算得到的校正参数应用到路网数据上,对路网中的每个元素进行坐标转换和调整;
19、7.2路网形态调整:首先,采用膨胀法来扩宽道路,即利用缓冲区分析将矢量的道路线变成道路面,再利用骨架栅格法提取得到道路面的中心线;然后采用douglas-peucker简化算法对弯曲进行平滑处理。
20、与现有技术相比,本发明具有以下有益效果:本发明充分利用社区组团出入口与空间上下文之间的密切关联,为封闭式或半封闭式社区出入口地理位置信息不完善或缺失的问题提供了一种有效的解决方案。通过深入分析社区空间布局和出入口特性,本发明将组团出入口检测任务转化为二分类任务,并探究组团出入口处的形态特征和与周围要素的交互特征,利用机器学习的方法来识别出入口的潜在位置,为社区内可通行点的捕捉提供了新思路。这种方法不仅弥补了传统方法在信息获取上的不足,而且为社区管理和安全监控提供了强有力的技术支持。
技术特征:
1.一种基于二元不平衡方法的组团出入口检测方法,其特征在于,包括如下步骤:
2.如权利要求1中所述的基于二元不平衡方法的组团出入口检测方法,其特征在于:步骤1中包含真正出入口的线段对应的样本点标记为正样本,其余样本点被标记为负样本。
3.如权利要求1中所述的基于二元不平衡方法的组团出入口检测方法,其特征在于:步骤2中,内在特征是针对每个样本点从组团的自身结构特性定义,包括:面积、周长、凹凸性、到质心的距离、占比、主边长度、对称轴、到对称轴的长度。
4.如权利要求1中所述的基于二元不平衡方法的组团出入口检测方法,其特征在于:步骤3中,外在特征包括住宅数量、到道路的最短距离、到住宅楼栋的平均距离、到住宅楼栋的最短距离、转弯度、是否有道路穿过、轨迹密度、组团内外轨迹密度比、磁通量以及各个方位的磁通量。
5.如权利要求1中所述的基于二元不平衡方法的组团出入口检测方法,其特征在于:步骤5中,首先,使用smote算法对正样本进行过采样来增加正样本的数量,并剔除在空间上与正样本在物理距离上接近的负样本,两个样本之间的物理距离为沿着组团足迹的最短线性距离;然后,使用tomek links算法对负样本进行欠采样,并剔除与正样本在特征距离上相近的负样本来得到平衡的数据集;
6.如权利要求1中所述的基于二元不平衡方法的组团出入口检测方法,其特征在于:使用准确率、精确率、召回率和f1分数对lightgbm分类器预测结果进行评价。
7.如权利要求1中所述的基于二元不平衡方法的组团出入口检测方法,其特征在于:步骤7中包括基于控制点的路网校正与路网形态调整两个步骤:
技术总结
一种基于二元不平衡方法的组团出入口检测方法,其包括:步骤1,样本构造,将组团边界足迹切割为等距线段,取中点作为样本点,并标记正负样本;步骤2,提取反应组团形状、大小和空间布局属性的内在特征数据;步骤3,根据样本点与其所处空间上下文的关联关系和与行人的交互提取每个样本点的外在特征数据;步骤4,将内在特征和外在特征的数据集进行归一化并划分为训练集和测试集;步骤5,对正样本进行过采样,对负样本进行欠采样;步骤6,预测组团出入口;步骤7,将组团出入口嵌入社区道路网络。本发明利用组团的结构特性以及空间上下文特征以精确地推导和定位组团出入口的位置信息,提高社区微尺度路径规划的准确性,优化行人的导航体验。
技术研发人员:杨林,彭艳,倪慧珠,左泽均,张泱娟
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2025/1/16
- 还没有人留言评论。精彩留言会获得点赞!