一种基于弧段联合的椭圆检测方法、系统及点云重建方法
本发明属于三维测量,更具体地,涉及一种基于弧段联合的椭圆检测方法、系统及点云重建方法。
背景技术:
1、光学三维测量技术是一种利用光学原理获取物体三维空间形状、位置和表面特征的测量方法,一般可分为主动光学三维测量和被动光学三维测量。其中主动光学三维测量是通过向待测物体表面投射光图案,经过立体相机采集物体表面调制后的光图案,进行解调和立体重建出三维点云。相较于被动光学三维测量,主动光学三维测量可以获取更完整的三维形貌数据,应用更为广泛。
2、但是受限于测量视角,单次三维测量仍然无法获取物体表面全部三维数据,实践中往往通过向待测物体表面粘贴标志点,获取单视角表面三维点云的同时提取标志点中心的三维点云,在多次测量过程中依据物体表面相对固定的标志点三维坐标,将各视角的表面三维点云拼接到同一坐标系下。基于标志点的多视角测量点云拼合方法测量精度高、拼接速度快,但是主动光线三维测量过程中投射的光条纹会干扰到标志点的三维提取,造成标志点提取数量下降,拼接不稳定等挑战。
3、因此,目前亟需一种能够稳定准确提取图像中受光条纹干扰影响的圆形标志点的方法,从而为主动光学三维测量过程多视角三维点云稳定拼接提供支撑。
技术实现思路
1、针对现有技术的以上缺陷或改进需求,本发明提供了一种基于弧段联合的椭圆检测方法、系统及点云重建方法,其目的在于,实现高精度的椭圆检测提取,从而稳定准确提取图像中受光条纹干扰影响的圆形标志点。
2、为实现上述目的,按照本发明的第一方面,提出了一种基于弧段联合的椭圆检测方法,包括如下步骤:
3、s1、基于边缘检测算法获取目标图像中所有的椭圆弧段以及椭圆弧段包含的边缘点;
4、s2、计算各椭圆弧段的角度跨度;
5、对于角度跨度不小于第一跨度阈值的椭圆弧段,将每个椭圆弧段作为一个备选椭圆;
6、对于角度跨度小于第一跨度阈值的椭圆弧段,则基于凸性约束和相对位置约束对椭圆弧段进行配对;若配对后的椭圆弧段跨度在第二跨度阈值和2π之间,则将其作为一个备选椭圆;
7、s3、对每个备选椭圆中的边缘点进行椭圆拟合,得到拟合的椭圆表达式;
8、s4、对每个备选椭圆,根据其中边缘点的连续性和梯度,以及拟合得到椭圆的形状判断椭圆的提取质量,保留质量较高的椭圆,完成椭圆检测。
9、作为进一步优选的,所述基于凸性约束和相对位置约束对椭圆弧段进行配对,具体为:
10、当两个椭圆弧段满足下式时,将该两个椭圆弧段进行配对;
11、
12、其中,a1、b1、m1为椭圆弧a1m1b1的两端点和中点,a2、b2、m2为椭圆弧a2m2b2的两端点和中点;l1和l2分别为弦a1b1和弦a2b2所在直线方程;
13、当一个椭圆弧段与多个其他椭圆弧段均配对成功时,仅取多个其他椭圆弧段中跨度最大的一个与该椭圆弧段配对。
14、作为进一步优选的,所述第一跨度阈值为3π/2,所述第二跨度阈值为4π/3。
15、作为进一步优选的,对每个备选椭圆,根据其中边缘点的连续性和梯度,以及拟合得到椭圆的形状判断椭圆的提取质量,包括:
16、将备选椭圆中的边缘点均按逆时针方向排序得到的有序点集;对每个备选椭圆,计算其对应的椭圆质量评价函数值,若椭圆质量评价函数值大于预设评价阈值时,则判断保留对应椭圆;所述椭圆质量评价函数ps为:
17、
18、其中,si为形状指标,lii、gii、wii分别为第i个边缘点的位置指标、梯度指标、加权距离指标,n为有序点集中边缘点的总数。
19、作为进一步优选的,形状指标si表示为:
20、
21、其中,a、b分别为拟合得到椭圆长半轴、半短轴的长度,θarc为弧段弯曲角度阈值。
22、作为进一步优选的,位置指标lii的确定方式为:对于有序点集中的第i个边缘点vi,若其8个邻域像素上出现相邻的边缘点vi-1或vi+1,则lii=1;否则lii=0。
23、作为进一步优选的,梯度指标gii,表示为:
24、
25、
26、其中,gi为第i个边缘点处根据拟合的椭圆方程确定的理论梯度,ii为第i个边缘点处根据图像灰度计算的实际梯度,∥·∥2表示二范数。
27、作为进一步优选的,加权距离指标wii表示为:
28、
29、其中,ri为第i个边缘点到拟合椭圆中心的距离,r为椭圆长半轴长,θi为第i个边缘点的旋转角。
30、按照本发明的第二方面,提供了一种基于弧段联合的椭圆检测系统,包括处理器,所述处理器用于执行上述基于弧段联合的椭圆检测方法。
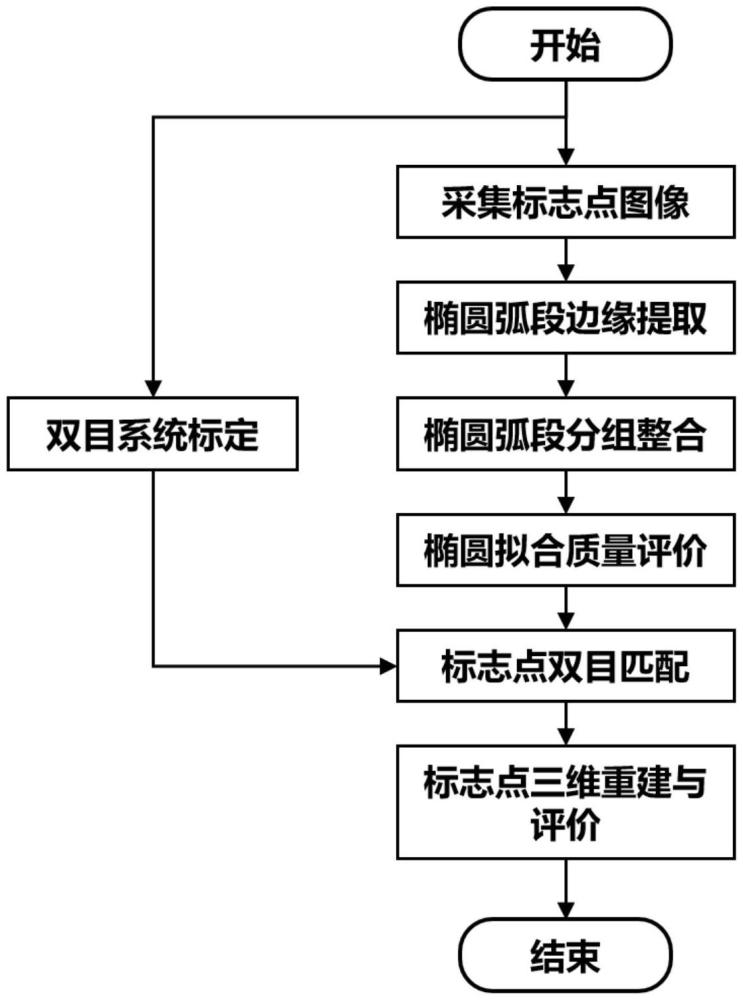
31、按照本发明的第三方面,提供了一种标志点三维点云重建方法,包括如下步骤:
32、在目标物体上预先粘贴圆形标志点,通过双目相机对应获取两幅包含标志点的目标图像;
33、通过上述基于弧段联合的椭圆检测方法分别检测得到两幅目标图像上的椭圆,即标志点;
34、对两幅目标图像上的椭圆,先通过极线匹配法进行初始匹配,然后通过随机采样一致法进行准确匹配,得到标志点圆轮廓;进而根据标志点实际尺寸,剔除尺寸不符合的匹配后标志点,得到标志点三维点云。
35、总体而言,通过本发明所构思的以上技术方案与现有技术相比,主要具备以下的技术优点:
36、1.本发明在通过边缘检测算法获取椭圆弧段后,基于弧段的跨度、凸性和相对位置关系对其进行分组匹配,进而通过椭圆拟合和筛选,实现高鲁棒性、高精度的椭圆检测提取,能够稳定准确提取图像中受光条纹干扰影响的圆形标志点。
37、2.基于本发明椭圆检测方法,能在光条纹干扰状态下,精确提取出受激光线影响的标志点圆,增加每帧图像中的标志点数量,实现更高精度的标志点三维点云拼接,为主动光学三维测量过程多视角三维点云稳定拼接提供支撑。
38、3.本发明基于边缘点的连续性和梯度以及椭圆的形状创建了椭圆质量评价函数,从而验证拟合椭圆是否为真,可排除质量较差的标志点的干扰,提高检测精度。
技术特征:
1.一种基于弧段联合的椭圆检测方法,其特征在于,包括如下步骤:
2.如权利要求1所述的基于弧段联合的椭圆检测方法,其特征在于,所述基于凸性约束和相对位置约束对椭圆弧段进行配对,具体为:
3.如权利要求1所述的基于弧段联合的椭圆检测方法,其特征在于,所述第一跨度阈值为3π/2,所述第二跨度阈值为4π/3。
4.如权利要求1-3任一项所述的基于弧段联合的椭圆检测方法,其特征在于,对每个备选椭圆,根据其中边缘点的连续性和梯度,以及拟合得到椭圆的形状判断椭圆的提取质量,包括:
5.如权利要求4所述的基于弧段联合的椭圆检测方法,其特征在于,形状指标si表示为:
6.如权利要求4所述的基于弧段联合的椭圆检测方法,其特征在于,位置指标lii的确定方式为:对于有序点集中的第i个边缘点vi,若其8个邻域像素上出现相邻的边缘点vi-1或vi+1,则lii=1;否则lii=0。
7.如权利要求4所述的基于弧段联合的椭圆检测方法,其特征在于,梯度指标gii,表示为:
8.如权利要求4所述的基于弧段联合的椭圆检测方法,其特征在于,加权距离指标wii表示为:
9.一种基于弧段联合的椭圆检测系统,其特征在于,包括处理器,所述处理器用于执行如权利要求1-8任一项所述的基于弧段联合的椭圆检测方法。
10.一种标志点三维点云重建方法,其特征在于,包括如下步骤:
技术总结
本发明属于三维测量技术领域,并具体公开了一种基于弧段联合的椭圆检测方法、系统及点云重建方法,其包括:基于边缘检测算法获取目标图像中椭圆弧段及边缘点;对于角度跨度不小于第一跨度阈值的椭圆弧段,将每个椭圆弧段作为备选椭圆;对于角度跨度小于第一跨度阈值的椭圆弧段,则基于凸性约束和相对位置约束对椭圆弧段进行配对;若配对后的椭圆弧段跨度在第二跨度阈值和2π之间,将其作为备选椭圆;对备选椭圆中的边缘点进行椭圆拟合,得到拟合椭圆;对每个备选椭圆,根据其中边缘点的连续性和梯度,以及拟合椭圆的形状判断椭圆的提取质量,保留质量较高的椭圆。本发明可实现高精度椭圆检测,从而稳定准确提取图像中受光条纹干扰的圆形标志点。
技术研发人员:李中伟,钟凯,晏都,吴宇涵
受保护的技术使用者:华中科技大学
技术研发日:
技术公布日:2025/1/9
- 还没有人留言评论。精彩留言会获得点赞!