一种鹰眼相机与GIS地图关联控制的方法及装置与流程
本发明涉及视频监控,具体而言,尤其涉及一种鹰眼相机与gis地图关联控制的方法及装置。
背景技术:
1、鹰眼技术已经广泛应用于多个领域,包括安全监控、交通管理、体育竞技等。在实景地图等信息系统建设过程中,根据gis地图上的选址,旋转球机方向、聚焦到指定的目标区域和画面,是实现远程精准、快速监控的关键。
2、目前存在多种方案来解决相机的视角调整问题,最常用的两个方法主要基于传感器模型和机器视觉技术。基于传感器模型的转换方法对相机内外参数的准确性要求较高,如果参数标定不准确或发生变化,转换结果可能会出现偏差。基于机器视觉的转换方法则利用图像特征提取和匹配技术,如果图像模糊、特征不明显或特征点分布不均匀,转换精度可能会下降。另外,相机的初始状态未知,一些相机在处理图像畸变方面效果并不理想,这些因素都可能导致坐标转换的计算结果不够准确。
3、相关技术中,图像模糊或图像畸变导致相机视角调整位置不准确的技术问题,尚未得到有效的解决方案。
技术实现思路
1、本申请的主要目的在于提供一种鹰眼相机与gis地图关联控制的方法及装置,以至少解决相关技术中图像模糊或图像畸变导致相机视角调整位置不准确的问题。
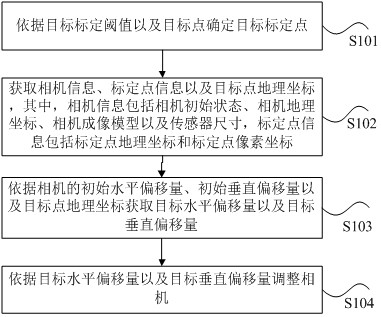
2、为了实现上述目的,根据本申请的一个方面,提供了一种鹰眼相机与gis地图关联控制的方法。该方法包括:依据目标标定阈值以及目标点确定目标标定点;获取相机信息、标定点信息以及目标点地理坐标,其中,相机信息包括相机初始状态、相机地理坐标、相机成像模型以及传感器尺寸,标定点信息包括标定点地理坐标和标定点像素坐标;依据相机的初始水平偏移量、初始垂直偏移量以及目标点地理坐标获取目标水平偏移量以及目标垂直偏移量;依据目标水平偏移量以及目标垂直偏移量调整相机。
3、可选地,步骤s201,将相机的视野范围分割成至少一张标定图像,在标定图像上选取初始标定点,其中,一张标定图像上至少标定一个初始标定点;步骤s202,依据初始标定点的地理信息在gis地图以及实景画面上标记实验点,其中,一个初始标定点对应一个实验点;步骤s203,判断初始标定点与其对应的实验点的准确性;步骤s204,当初始标定点与其对应的实验点的不准确时,重复步骤s202-s203;步骤s205,当初始标定点与其对应的实验点的准确时,获取与目标点最近的初始标定点的标定距离,判断标定距离是否小于目标标定阈值;步骤s206,当标定距离大于或等于目标标定阈值时,重复执行步骤s202-s205;步骤s207,当标定距离小于目标标定阈值时,确定标定距离对应的初始标定点为目标标定点。
4、可选地,计算目标标定阈值,计算公式为,其中,为目标标定阈值,为相机的水平视角,为相机与目标标定点的水平距离。
5、可选地,建立相机成像模型,相机成像模型中包括图像平面、世界坐标系以及光心水平面,图像平面上包括像素坐标系以及图像坐标系,像素坐标系的原点为图像平面的左上角,图像坐标系的原点为图像平面的中心点,图像平面垂直于相机的光轴,相机的光轴穿过中心点;计算焦距,计算公式为,为相机的传感器的宽度,为相机的水平视角,焦距为相机到图像平面的中心点的距离;计算目标标定点与光心水平面的垂直夹角,计算公式为,为目标标定点与光心水平面的垂直夹角,为相机与目标标定点的高度差,为相机与目标标定点的水平距离;计算相机到目标标定点距离,计算公式为,为相机到目标标定点距离,为焦距,为目标标定点的像素横坐标,为目标标定点的像素纵坐标。
6、可选地,计算目标标定点与正北方向的夹角,计算公式为,其中,为目标标定点与正北方向的夹角,是目标标定点与相机的距离,是目标标定点在相机南北方向的垂直距离;计算相机与目标标定点垂直于光心水平面的焦点之间的距离,计算公式为,为相机与目标标定点垂直于光心水平面的焦点之间的距离,为目标标定点与光心水平面的垂直夹角,为相机到目标标定点距离;计算目标标定点与当前相机光轴的水平夹角,计算公式为,为目标标定点与当前相机光轴的水平夹角,为目标标定点在图像平面上的横坐标;计算初始水平偏移量,计算公式为,其中,为初始水平偏移量,为相机水平旋转角度。
7、可选地,计算目标标定点与光轴相对于相机的夹角,计算公式为,为目标标定点与光轴相对于相机的夹角,为目标标定点的像素纵坐标,为焦距;计算初始垂直偏移量,计算公式为,其中,为初始垂直偏移量,为目标标定点与光心水平面的垂直夹角,为相机垂直旋转角度。
8、可选地,计算目标点与正北方向的夹角,计算公式为,其中,为目标点与正北方向的夹角,是目标点与相机的距离,是目标点在相机南北方向的垂直距离;计算目标点与光心水平面的垂直夹角,计算公式为,其中,为目标点与光心水平面的垂直夹角,为相机与目标点的高度差,为相机与目标点的水平距离;计算目标水平偏移量,计算公式为,其中,为目标水平偏移量,为初始水平偏移量,为相机水平旋转角度;计算目标垂直偏移量,计算公式为,为目标垂直偏移量,为相机垂直旋转角度,为初始垂直偏移量。
9、根据本申请的另一方面,提供了一种鹰眼相机与gis地图关联控制的装置。该装置包括:
10、确定单元,用于依据目标标定阈值以及目标点确定目标标定点;第一获取单元,用于获取相机信息、标定点信息以及目标点地理坐标,其中,相机信息包括相机初始状态、相机地理坐标、相机成像模型以及传感器尺寸,标定点信息包括标定点地理坐标和标定点像素坐标;第二获取单元,用于依据相机的初始水平偏移量、初始垂直偏移量以及目标点地理坐标获取目标水平偏移量以及目标垂直偏移量;调整单元,用于依据目标水平偏移量以及目标垂直偏移量调整相机。
11、为了实现上述目的,根据本申请的另一方面,提供了一种计算机可读存储介质,该计算机可读存储介质包括存储的程序,其中,该程序执行上述任意一项的一种鹰眼相机与gis地图关联控制的方法。
12、根据本申请的另一方面,提供了一种电子设备,包括:一个或多个处理器,存储器,以及一个或多个程序,其中,一个或多个程序被存储在存储器中,并且被配置为由一个或多个处理器执行,一个或多个程序包括用于执行任意一项的一种鹰眼相机与gis地图关联控制的方法。
13、通过本申请,采用以下步骤:依据目标标定阈值以及目标点确定目标标定点;获取相机信息、标定点信息以及目标点地理坐标,其中,相机信息包括相机初始状态、相机地理坐标、相机成像模型以及传感器尺寸,标定点信息包括标定点地理坐标和标定点像素坐标;依据相机的初始水平偏移量、初始垂直偏移量以及目标点地理坐标获取目标水平偏移量以及目标垂直偏移量;依据目标水平偏移量以及目标垂直偏移量调整相机,解决了相关技术中图像模糊或图像畸变导致相机视角调整位置不准确的问题,进而达到了在调整相机视角时,坐标计算不受到图像变形干扰的效果。
技术特征:
1.一种鹰眼相机与gis地图关联控制的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,依据目标标定阈值以及目标点确定目标标定点,包括:
3.根据权利要求1所述的方法,其特征在于,依据目标标定阈值以及目标点确定目标标定点,包括:
4.根据权利要求1所述的方法,其特征在于,获取相机信息、标定点信息以及目标点地理坐标,包括:
5.根据权利要求4所述的方法,其特征在于,依据相机的初始水平偏移量、初始垂直偏移量以及所述目标点地理坐标获取目标水平偏移量以及目标垂直偏移量,包括:
6.根据权利要求4所述的方法,其特征在于,依据相机的初始水平偏移量、初始垂直偏移量以及所述目标点地理坐标获取目标水平偏移量以及目标垂直偏移量,包括:
7.根据权利要求4所述的方法,其特征在于,依据相机的初始水平偏移量、初始垂直偏移量以及所述目标点地理坐标获取目标水平偏移量以及目标垂直偏移量,包括:
8.一种鹰眼相机与gis地图关联控制的装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的程序,其中,在所述程序运行时控制所述计算机可读存储介质所在设备执行权利要求1至7中任意一项所述的一种鹰眼相机与gis地图关联控制的方法。
10.一种电子设备,其特征在于,包括:一个或多个处理器,存储器,以及一个或多个程序,其中,所述一个或多个程序被存储在所述存储器中,并且被配置为由所述一个或多个处理器执行,所述一个或多个程序包括用于执行权利要求1至7中任意一项所述的一种鹰眼相机与gis地图关联控制的方法。
技术总结
本发明公开了一种鹰眼相机与GIS地图关联控制的方法及装置。该发明包括:依据目标标定阈值以及目标点确定目标标定点;获取相机信息、标定点信息以及目标点地理坐标,其中,相机信息包括相机初始状态、相机地理坐标、相机成像模型以及传感器尺寸,标定点信息包括标定点地理坐标和标定点像素坐标;依据相机的初始水平偏移量、初始垂直偏移量以及目标点地理坐标获取目标水平偏移量以及目标垂直偏移量;依据目标水平偏移量以及目标垂直偏移量调整相机。通过本发明,解决了相关技术中图像模糊或图像畸变导致相机视角调整位置不准确的问题。
技术研发人员:王阳,吕建忠,王璐
受保护的技术使用者:智广海联大数据技术有限公司
技术研发日:
技术公布日:2024/11/7
- 还没有人留言评论。精彩留言会获得点赞!