基于点云数据的导线生成方法、装置、设备及存储介质与流程
本发明涉及三维建模,尤其涉及一种基于点云数据的导线生成方法、装置、设备及存储介质。
背景技术:
1、随着三维激光扫描技术的发展,点云数据已成为获取地理空间信息的重要手段。在城市规划、基础设施建设和地理信息系统中,点云数据的应用愈发广泛,如应用于导线路径生成。
2、传统的导线路径生成方法依赖于人工操作,效率低下且易于受到人为因素影响,导致导线路径生成过程反复且误差难以控制。在针对复杂的实际环境中,传统的导线路径生成方式需要耗费大量的人力物力,同时也无法保证导线路径的精确度。因此,目前亟需一种能够基于点云数据准确生成导线路径的方法。
技术实现思路
1、有鉴于此,本发明的目的是为了克服现有技术中的不足,提供一种基于点云数据的导线生成方法、装置、电子设备及可读存储介质。
2、本发明提供如下技术方案:
3、第一方面,本公开实施例中提供了一种基于点云数据的导线生成方法,所述方法包括:
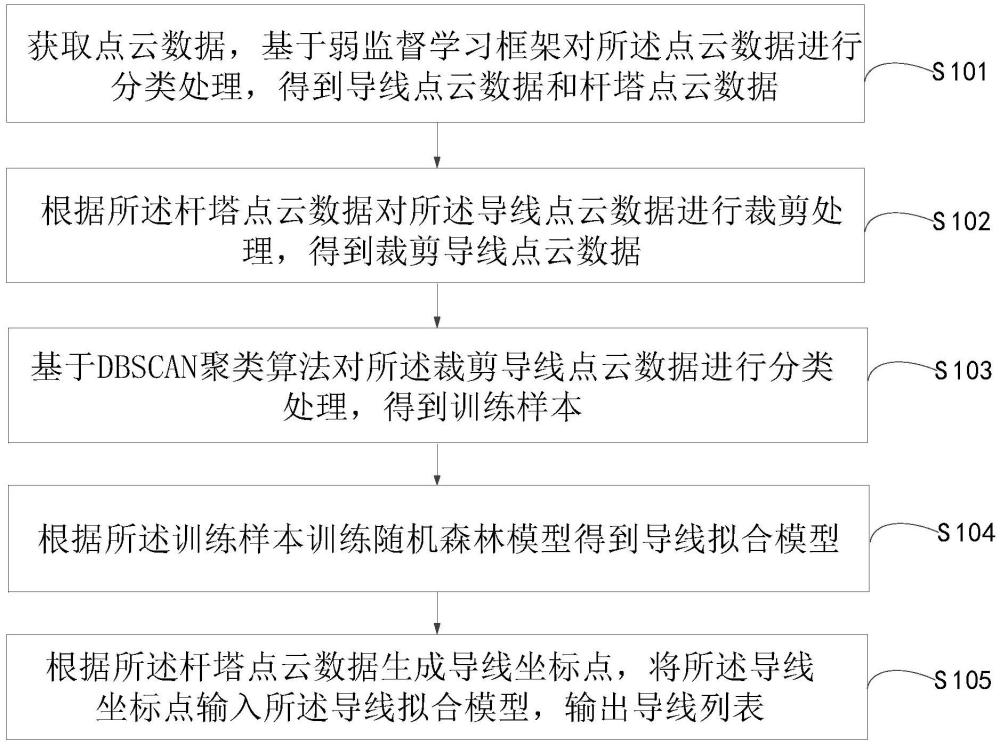
4、获取点云数据,基于弱监督学习框架对所述点云数据进行分类处理,得到导线点云数据和杆塔点云数据;
5、根据所述杆塔点云数据对所述导线点云数据进行裁剪处理,得到裁剪导线点云数据;
6、基于dbscan聚类算法对所述裁剪导线点云数据进行分类处理,得到训练样本;
7、根据所述训练样本训练随机森林模型得到导线拟合模型;
8、根据所述杆塔点云数据生成导线坐标点,将所述导线坐标点输入所述导线拟合模型,输出导线列表。
9、根据本申请公开的一种具体实施方式,所述获取点云数据,基于弱监督学习框架对所述点云数据进行分类处理,得到导线点云数据和杆塔点云数据的步骤,包括:
10、对所述点云数据中的导线和杆塔进行涂鸦标注处理,得到标注点云数据;
11、根据所述标注点云数据生成伪标签,通过所述伪标签构成训练集;
12、根据所述训练集训练神经网络模型,得到初步分类模型;
13、对所述初步分类模型进行迭代优化处理,得到最终分类模型;
14、将所述点云数据输入所述最终分类模型,输出导线点云数据和杆塔点云数据。
15、根据本申请公开的一种具体实施方式,所述根据所述杆塔点云数据对所述导线点云数据进行裁剪处理,得到裁剪导线点云数据的步骤,包括:
16、根据所述杆塔点云数据确定杆塔位置和杆塔间的向量;
17、根据所述杆塔位置和所述杆塔间的向量确定裁剪box的尺寸和方向;
18、根据所述裁剪box的尺寸和方向对所述导线点云数据进行裁剪处理,剔除所述导线点云数据中的冗余数据得到裁剪导线点云数据。
19、根据本申请公开的一种具体实施方式,所述基于dbscan聚类算法对所述裁剪导线点云数据进行分类处理,得到训练样本的步骤,包括:
20、计算所述裁剪导线点云数据中点的邻域;
21、根据所述邻域标记所述裁剪导线点云数据中的核心点;
22、根据所述核心点和所述邻域确定密度相连点;
23、标记所述裁剪导线点云数据中的噪声点和边界点;
24、对所述核心点和所述密度相连点添加簇标签,对所述噪声点进行剔除处理。
25、根据本申请公开的一种具体实施方式,所述基于dbscan聚类算法对所述裁剪导线点云数据进行分类处理,得到训练样本的步骤,还包括:
26、所述dbscan聚类算法入参为las、eps和minsize,其中,las为输入的裁剪导线点云数据,eps为计算半径的大小,minsize为核心点周围所需的最小数据点数。
27、根据本申请公开的一种具体实施方式,所述根据所述训练样本训练随机森林模型得到导线拟合模型的步骤,包括:
28、设定随机森林模型的初始化参数,将所述训练样本分为训练集和验证集;
29、根据所述训练集训练所述随机森林模型,得到初步导线拟合模型;
30、根据所述验证集对所述初步导线拟合模型进行迭代优化,得到导线拟合模型。
31、根据本申请公开的一种具体实施方式,所述根据所述杆塔点云数据生成导线坐标点,将所述导线坐标点输入所述导线拟合模型,输出导线列表的步骤,包括:
32、根据所述杆塔点云数据确定杆塔中心点;
33、根据所述杆塔中心点确定所述导线点云数据中距离所述杆塔中心点最近的左边界点和右边界点;
34、根据所述左边界点和所述右边界点之间的距离生成导线坐标点;
35、根据导线列表公式pnew,k=pleft+nzrf(pright-pleft)获取导线列表坐标点,其中,pnew,k为导线列表坐标点,pright为左边界点坐标,pleft为右边界点坐标,nzrf为导线拟合模型。
36、第二方面,本公开实施例中提供了一种基于点云数据的导线生成装置,所述装置包括:
37、获取模块,用于获取点云数据,基于弱监督学习框架对所述点云数据进行分类处理,得到导线点云数据和杆塔点云数据;
38、裁剪模块,用于根据所述杆塔点云数据对所述导线点云数据进行裁剪处理,得到裁剪导线点云数据;
39、分类模块,用于基于dbscan聚类算法对所述裁剪导线点云数据进行分类处理,得到训练样本;
40、训练模块,用于根据所述训练样本训练随机森林模型得到导线拟合模型;
41、生成模块,用于根据所述杆塔点云数据生成导线坐标点,将所述导线坐标点输入所述导线拟合模型,输出导线列表。
42、第三方面,本公开实施例中提供了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现第一方面中任一项所述的基于点云数据的导线生成方法的步骤。
43、第四方面,本公开实施例中提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现第一方面中任一项所述的基于点云数据的导线生成方法的步骤。
44、上述本申请提供的基于点云数据的导线生成方法,获取点云数据,基于弱监督学习框架对所述点云数据进行分类处理,得到导线点云数据和杆塔点云数据,根据所述杆塔点云数据对所述导线点云数据进行裁剪处理,得到裁剪导线点云数据,基于dbscan聚类算法对所述裁剪导线点云数据进行分类处理,得到训练样本,根据所述训练样本训练随机森林模型得到导线拟合模型,根据所述杆塔点云数据生成导线坐标点,将所述导线坐标点输入所述导线拟合模型,输出导线列表,通过导线拟合模型自动识别和提取点云数据中的导线路径,提高了导线路径的提取速度和精确度,提高了导线路径的生成效率。
45、为使本发明的上述目的、特征和优点能更明显和易懂,下文特举较佳实施例,并配合所附附图,做详细说明如下。
技术特征:
1.一种基于点云数据的导线生成方法,其特征在于,所述方法包括:
2.根据权利要求1所述的基于点云数据的导线生成方法,其特征在于,所述获取点云数据,基于弱监督学习框架对所述点云数据进行分类处理,得到导线点云数据和杆塔点云数据的步骤,包括:
3.根据权利要求1所述的基于点云数据的导线生成方法,其特征在于,所述根据所述杆塔点云数据对所述导线点云数据进行裁剪处理,得到裁剪导线点云数据的步骤,包括:
4.根据权利要求1所述的基于点云数据的导线生成方法,其特征在于,所述基于dbscan聚类算法对所述裁剪导线点云数据进行分类处理,得到训练样本的步骤,包括:
5.根据权利要求1所述的基于点云数据的导线生成方法,其特征在于,所述基于dbscan聚类算法对所述裁剪导线点云数据进行分类处理,得到训练样本的步骤,还包括:
6.根据权利要求1所述的基于点云数据的导线生成方法,其特征在于,所述根据所述训练样本训练随机森林模型得到导线拟合模型的步骤,包括:
7.根据权利要求1所述的基于点云数据的导线生成方法,其特征在于,所述根据所述杆塔点云数据生成导线坐标点,将所述导线坐标点输入所述导线拟合模型,输出导线列表的步骤,包括:
8.一种基于点云数据的导线生成装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现权利要求1-7中任一项所述的基于点云数据的导线生成方法的步骤。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现权利要求1-7中任一项所述的基于点云数据的导线生成方法的步骤。
技术总结
本申请实施例提供了一种基于点云数据的导线生成方法、装置、设备及存储介质,涉及三维建模领域,通过获取点云数据,基于弱监督学习框架对所述点云数据进行分类处理,得到导线点云数据和杆塔点云数据,根据所述杆塔点云数据对所述导线点云数据进行裁剪处理,得到裁剪导线点云数据,基于DBSCAN聚类算法对所述裁剪导线点云数据进行分类处理,得到训练样本,根据所述训练样本训练随机森林模型得到导线拟合模型,根据所述杆塔点云数据生成导线坐标点,将所述导线坐标点输入所述导线拟合模型,输出导线列表,通过导线拟合模型自动识别和提取点云数据中的导线路径,提高了导线路径的提取速度和精确度,提高了导线路径的生成效率。
技术研发人员:李倩,伍艳妮,李靖
受保护的技术使用者:长沙能川信息科技有限公司
技术研发日:
技术公布日:2025/1/13
- 还没有人留言评论。精彩留言会获得点赞!