一种基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法与流程
本公开涉及盾构施工,尤其涉及一种基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法。
背景技术:
1、盾构机作为现代地下工程的重要施工设备,广泛应用于城市轨道交通、隧道建设等领域,随着城市化进程的加速,盾构掘进的需求日益增长,然而,盾构施工环境复杂多变,潜在风险和不确定性增加,智能预警系统应运而生,成为提升盾构施工安全性和效率的重要手段。盾构掘进过程中常会遇到地质突变、地下水涌入、周围结构物变形等意外情况,这些都可能对施工安全造成威胁,通过智能预警系统,施工团队可以实时监测周围环境及盾构机的运行状态,一旦出现异常,系统能够迅速发出警报,提示操作人员采取相应措施,及时调整施工方案,从而有效避免事故的发生;智能预警系统通过对大量数据的实时分析,可以为盾构施工提供科学依据,帮助决策者选择合适的盾构参数和掘进速度,提高了施工效率,减少了资源浪费,从而降低项目成本;能够将各类传感器与数据分析技术结合,通过精准的数据采集与分析,实现对施工现场的全面监控,提高施工过程的透明度,帮助管理者实时掌握施工动态,及时发现问题并进行调整;在突发事件发生时,可以快速收集和分析现场数据,辅助决策者制定应急预案,通过对历史事故数据的分析,系统能够识别潜在风险,提前做好预警,确保施工团队能够高效、有序地应对各种突发情况,降低了施工事故带来的损失和影响。因此,对盾构掘进进行预警具有重要意义。
2、目前,现有的盾构掘进预警过程中,通常依靠人工观察和经验判断,导致预警准确性较低。
技术实现思路
1、本公开提供了一种基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法。
2、根据本公开的第一方面,提供了一种基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法。该方法包括:
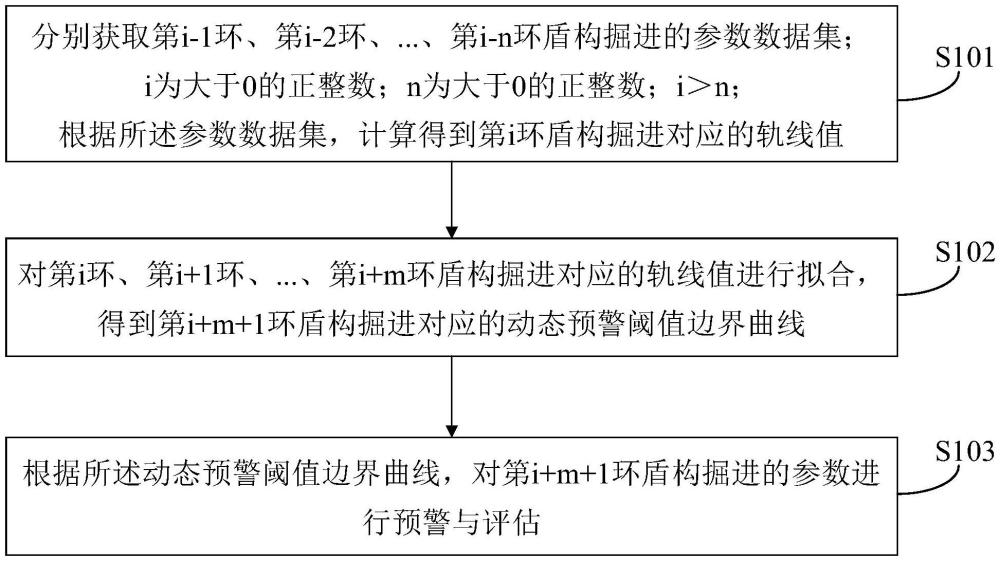
3、分别获取第i-1环、第i-2环、...、第i-n环盾构掘进的参数数据集;i为大于0的正整数;n为大于0的正整数;i>n;根据所述参数数据集,计算得到第i环盾构掘进对应的轨线值;
4、对第i环、第i+1环、...、第i+m环盾构掘进对应的轨线值进行拟合,得到第i+m+1环盾构掘进对应的动态预警阈值边界曲线;
5、根据所述动态预警阈值边界曲线,对第i+m+1环盾构掘进的参数进行预警与评估。
6、进一步地,所述参数数据集至少包括下列中的至少一个:推进速度数据集、刀盘转速数据集、刀盘扭矩数据集和总推力数据集。
7、进一步地,所述轨线值包括:上轨线值、中轨线值和下轨线值。
8、进一步地,所述分别获取第i-1环、第i-2环、...、第i-n环盾构掘进的参数数据集;i为大于0的正整数;n为大于0的正整数;i>n;根据所述参数数据集,计算得到第i环盾构掘进对应的轨线值,包括:
9、根据第i-1环、第i-2环、...、第i-n环盾构掘进的参数数据集,确定对应的参数中位数;
10、根据各所述参数中位数的平均值,确定第i环盾构掘进对应的中轨线值;
11、根据预警限度阈值和各所述参数中位数的标准差,确定第i环盾构掘进对应的上轨线值和下轨线值。
12、进一步地,所述根据预警限度阈值和各所述参数中位数的标准差,确定第i环盾构掘进对应的上轨线值和下轨线值,包括:
13、根据各所述参数中位数的标准差和第i环盾构掘进对应的中轨线值,确定第i环盾构掘进对应的参数最大值和参数最小值;
14、根据预警限度阈值、第i环盾构掘进对应的参数最大值,确定第i环盾构掘进对应的上轨线值;
15、根据预警限度阈值、第i环盾构掘进对应的参数最小值,确定第i环盾构掘进对应的下轨线值。
16、进一步地:通过多项式拟合的方式对第i环、第i+1环、...、第i+m环盾构掘进对应的轨线值进行拟合。
17、进一步地,所述根据所述动态预警阈值边界曲线,对第i+m+1环盾构掘进的参数进行预警,包括:
18、所述动态预警阈值边界曲线包括上边界曲线和下边界曲线;
19、若第i+m+1环盾构掘进的参数在预设时间内存在超过预设数量的参数超过上边界曲线或下边界曲线,则进行预警。
20、进一步地,所述根据所述动态预警阈值边界曲线,对第i+m+1环盾构掘进的参数进行预警与评估,包括:
21、若80%的第i+m+1环盾构掘进的参数位于上边界曲线和下边界曲线之间,则评估第i+m+1环盾构掘进的状态为平稳状态;否则评估第i+m+1环盾构掘进的状态为波动状态。
22、根据本公开的第二方面,提供了一种基于动态预警阈值边界曲线的智能盾构掘进预警与评估装置。该装置包括:
23、计算模块,用于分别获取第i-1环、第i-2环、...、第i-n环盾构掘进的参数数据集;i为大于0的正整数;n为大于0的正整数;i>n;根据所述参数数据集,计算得到第i环盾构掘进对应的轨线值;
24、拟合模块,用于对第i环、第i+1环、...、第i+m环盾构掘进对应的轨线值进行拟合,得到第i+m+1环盾构掘进对应的动态预警阈值边界曲线;
25、预警模块,用于根据所述动态预警阈值边界曲线,对第i+m+1环盾构掘进的参数进行预警与评估。
26、根据本公开的第三方面,提供了一种电子设备。该电子设备包括:存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现所述方法。
27、根据本公开的第四方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现所述方法。
28、与现有技术相比,本公开具有的有益效果为:
29、1、通过获取第i-1环、第i-2环至第i-n环的参数数据,可以建立更为全面的历史数据集,这种多层次的数据积累,有助于捕捉到掘进过程中的趋势和变化,有效提高预警的准确性;
30、2、通过计算第i环对应的轨线值,使得后续的预警基于当前的实际状态,而非仅依赖历史数据,能够反映出盾构机在掘进过程中的即时表现,减少时间延迟带来的影响;
31、3、通过对第i环、第i+1环等进行轨线值的拟合,可以利用数学模型提取潜在的规律与趋势,生成更加精确的动态预警阈值边界曲线,增强了预测的科学性,并能适应不同的地质条件。
32、应当理解,
技术实现要素:
部分中所描述的内容并非旨在限定本公开实施例的关键或重要特征,亦非用于限制本公开的范围。本公开的其它特征将通过以下的描述变得容易理解。
技术特征:
1.一种基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法,其特征在于,包括:
2.根据权利要求1所述的基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法,其特征在于,所述参数数据集至少包括下列中的至少一个:推进速度数据集、刀盘转速数据集、刀盘扭矩数据集和总推力数据集。
3.根据权利要求2所述的基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法,其特征在于,所述轨线值包括:上轨线值、中轨线值和下轨线值。
4.根据权利要求3所述的基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法,其特征在于,所述分别获取第i-1环、第i-2环、...、第i-n环盾构掘进的参数数据集;i为大于0的正整数;n为大于0的正整数;i>n;根据所述参数数据集,计算得到第i环盾构掘进对应的轨线值,包括:
5.根据权利要求4所述的基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法,其特征在于,所述根据预警限度阈值和各所述参数中位数的标准差,确定第i环盾构掘进对应的上轨线值和下轨线值,包括:
6.根据权利要求5所述的基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法,其特征在于:通过多项式拟合的方式对第i环、第i+1环、...、第i+m环盾构掘进对应的轨线值进行拟合。
7.根据权利要求6所述的基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法,其特征在于,所述根据所述动态预警阈值边界曲线,对第i+m+1环盾构掘进的参数进行预警,包括:
8.根据权利要求7所述的基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法,其特征在于,所述根据所述动态预警阈值边界曲线,对第i+m+1环盾构掘进的参数进行预警与评估,包括:
9.一种基于动态预警阈值边界曲线的智能盾构掘进预警与评估装置,其特征在于,包括:
10.一种电子设备,其特征在于,包括:至少一个处理器;与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行权利要求1-8中任一权利要求所述的方法。
技术总结
本申请提供了一种基于动态预警阈值边界曲线的智能盾构掘进预警与评估方法。应用于盾构施工技术领域,所述方法包括分别获取第i‑1环、第i‑2环、...、第i‑n环盾构掘进的参数数据集;i为大于0的正整数;n为大于0的正整数;i>n;根据所述参数数据集,计算得到第i环盾构掘进对应的轨线值;对第i环、第i+1环、...、第i+m环盾构掘进对应的轨线值进行拟合,得到第i+m+1环盾构掘进对应的动态预警阈值边界曲线;根据所述动态预警阈值边界曲线,对第i+m+1环盾构掘进的参数进行预警。以此方式,可以提高盾构掘进预警的准确性。
技术研发人员:李凤远,李站国,王纯亮,蔡骏,闫晋瑞,高会中,代勇,何蒙蒙,陈瑞祥,王俊杰,刘家俊,冯欢欢,李岩,魏淑妮
受保护的技术使用者:中铁隧道局集团有限公司
技术研发日:
技术公布日:2025/2/10
- 还没有人留言评论。精彩留言会获得点赞!