一种轨迹预测模型的训练方法、装置、设备及介质与流程
本发明涉及模型训练,尤其涉及一种轨迹预测模型的训练方法、装置、设备及介质。
背景技术:
1、运动预测是自动驾驶系统中十分重要的一环,旨在利用过去观察到的运动轨迹,通过建立模型让机器理解周围复杂交通环境中的交互,以准确预测自动驾驶车辆周围障碍物在未来一段时间内的运动轨迹,从而辅助自动驾驶汽车规划出准确安全合理的路线。
2、相关技术中,采用基于深度学习的方法进行轨迹预测。该方法采用了静态训练方式,将每个场景的数据被划分为历史轨迹数据和未来轨迹数据,且每次生成未来运动轨迹使用的历史轨迹都是一段固定长度的历史轨迹。然而,这种静态预测方法可能导致连续预测的不稳定性和不一致性,不能提供连续稳定的预测结果,从而影响自动驾驶系统的安全性和可靠性。
技术实现思路
1、本发明提供了一种轨迹预测模型的训练方法、装置、设备及介质,基于根据当前预测轨迹和历史预测轨迹确定的相似度损失对轨迹预测模型进行训练,能够有效地提高轨迹预测在时序上的连贯性和稳定性,有助于提高自动驾驶系统的安全性和可靠性。
2、根据本发明的一方面,提供了一种轨迹预测模型的训练方法,所述方法包括:
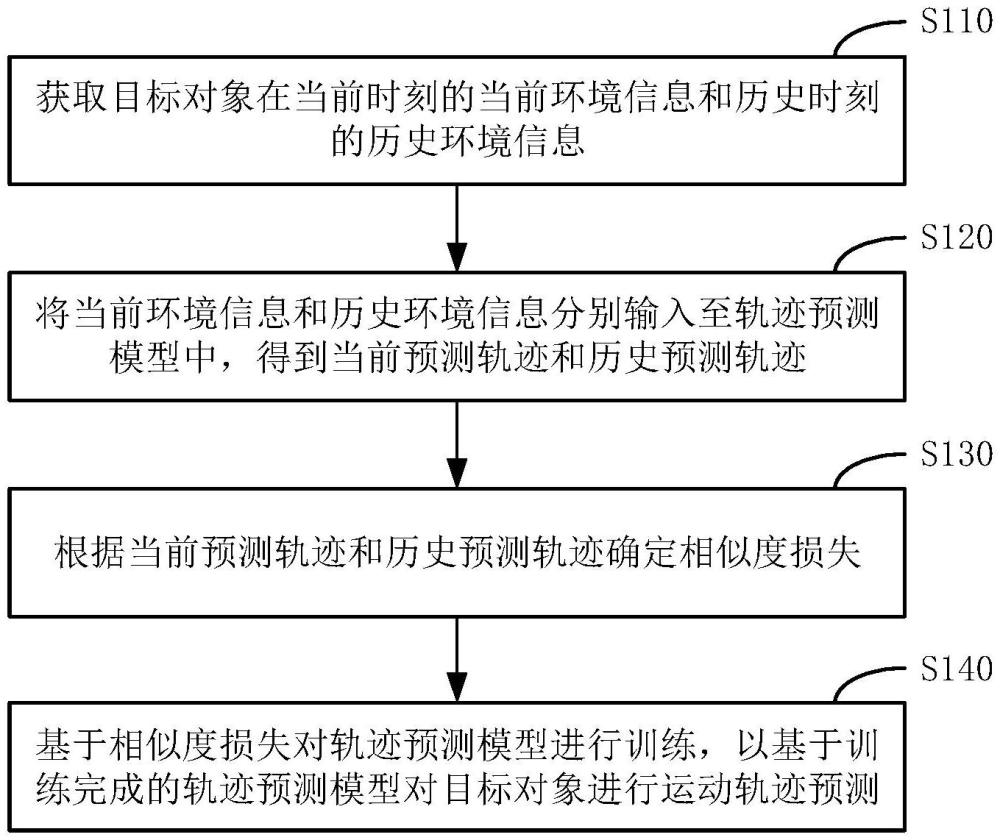
3、获取目标对象在当前时刻的当前环境信息和历史时刻的历史环境信息;其中,所述环境信息包括地图道路信息以及所述目标对象和参考对象的历史轨迹信息,所述参考对象是指位于所述目标对象预设空间范围内的其他对象;
4、将所述当前环境信息和所述历史环境信息分别输入至轨迹预测模型中,得到当前预测轨迹和历史预测轨迹;
5、根据所述当前预测轨迹和所述历史预测轨迹确定相似度损失;其中,所述相似度损失用于描述所述当前预测轨迹与所述历史预测轨迹之间的差异;
6、基于所述相似度损失对所述轨迹预测模型进行训练,以基于训练完成的轨迹预测模型对所述目标对象进行运动轨迹预测。
7、根据本发明的另一方面,提供了一种轨迹预测模型的训练装置,包括:
8、环境信息获取模块,用于获取目标对象在当前时刻的当前环境信息和历史时刻的历史环境信息;其中,所述环境信息包括地图道路信息以及所述目标对象和参考对象的历史轨迹信息,所述参考对象是指位于所述目标对象预设空间范围内的其他对象;
9、预测轨迹确定模块,用于将所述当前环境信息和所述历史环境信息分别输入至轨迹预测模型中,得到当前预测轨迹和历史预测轨迹;
10、相似度损失确定模块,用于根据所述当前预测轨迹和所述历史预测轨迹确定相似度损失;其中,所述相似度损失用于描述所述当前预测轨迹与所述历史预测轨迹之间的差异;
11、模型训练模块,用于基于所述相似度损失对所述轨迹预测模型进行训练,以基于训练完成的轨迹预测模型对所述目标对象进行轨迹预测模型的训练。
12、根据本发明的另一方面,提供了一种电子设备,所述电子设备包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行本发明任一实施例所述的轨迹预测模型的训练方法。
16、根据本发明的另一方面,提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现本发明任一实施例所述的轨迹预测模型的训练方法。
17、本发明实施例的技术方案,首先获取目标对象在当前时刻的当前环境信息和历史时刻的历史环境信息;其中,环境信息包括地图道路信息以及目标对象和参考对象的历史轨迹信息,参考对象是指位于目标对象预设空间范围内的其他对象;然后将当前环境信息和历史环境信息分别输入至轨迹预测模型中,得到当前预测轨迹和历史预测轨迹;进而根据当前预测轨迹和历史预测轨迹确定相似度损失;其中,相似度损失用于描述当前预测轨迹与历史预测轨迹之间的差异;最后基于相似度损失对轨迹预测模型进行训练,以基于训练完成的轨迹预测模型对目标对象进行运动轨迹预测。本技术方案,基于根据当前预测轨迹和历史预测轨迹确定的相似度损失对轨迹预测模型进行训练,能够有效地提高轨迹预测在时序上的连贯性和稳定性,有助于提高自动驾驶系统的安全性和可靠性。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种轨迹预测模型的训练方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述轨迹预测模型包括特征提取单元、特征融合单元和轨迹预测单元,所述特征提取单元包括地图特征提取单元和轨迹特征提取单元;
3.根据权利要求2所述的方法,其特征在于,所述地图特征提取单元采用车道图卷积网络;
4.根据权利要求2所述的方法,其特征在于,所述特征融合单元包括第一融合单元、第二融合单元、第三融合单元和第四融合单元;其中,所述第一融合单元用于将轨迹特征融合到地图特征中,所述第二融合单元用于对不同地图特征进行融合,所述第三融合单元用于将地图特征融合到轨迹特征中,所述第四融合单元用于对不同轨迹特征进行融合。
5.根据权利要求2所述的方法,其特征在于,所述轨迹特征提取单元包括卷积单元和特征金字塔单元;所述轨迹预测单元包括残差单元、线性单元和激活函数单元。
6.根据权利要求1所述的方法,其特征在于,所述当前预测轨迹和所述历史预测轨迹的数量相同且为至少两条;
7.根据权利要求1-6任一所述的方法,其特征在于,在将所述当前环境信息和所述历史环境信息分别输入至轨迹预测模型中,得到当前预测轨迹和历史预测轨迹之后,还包括:
8.一种轨迹预测模型的训练装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述电子设备包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机指令,所述计算机指令用于使处理器执行时实现权利要求1-7中任一项所述的轨迹预测模型的训练方法。
技术总结
本发明实施例公开了一种轨迹预测模型的训练方法、装置、设备及介质。其中,该方法包括:获取目标对象在当前时刻的当前环境信息和历史时刻的历史环境信息;将当前环境信息和历史环境信息分别输入至轨迹预测模型中,得到当前预测轨迹和历史预测轨迹;根据当前预测轨迹和历史预测轨迹确定相似度损失,相似度损失用于描述当前预测轨迹与历史预测轨迹之间的差异;基于相似度损失对轨迹预测模型进行训练,以基于训练完成的轨迹预测模型对目标对象进行运动轨迹预测。本方案基于根据当前预测轨迹和历史预测轨迹确定的相似度损失对轨迹预测模型进行训练,能够有效地提高轨迹预测在时序上的连贯性和稳定性,有助于提高自动驾驶系统的安全性和可靠性。
技术研发人员:王宁,李荣华,李曙光,陈红丽,卢丽婧,周航,修杰
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2025/2/5
- 还没有人留言评论。精彩留言会获得点赞!