集装箱堆场正面吊运机作业的路径规划仿真方法及系统与流程
本申请涉及路径分析领域,尤其涉及一种集装箱堆场正面吊运机作业的路径规划仿真方法及系统。
背景技术:
1、在集装箱堆场智能化管理领域,传统的路径规划方法主要依赖于静态路径规划算法和简单的避障策略。现有技术通常采用a*算法、dijkstra算法等经典路径规划方法,结合正面吊运机的运动学模型进行路径生成。正面吊运机作为公铁联运集装箱堆场的核心装卸设备,其作业路径具有非线性运行特征,也因此构成了复杂的非线性运动学约束,这使得传统路径规划方法在实际应用中面临诸多挑战。同时,一些改进方案引入了基于采样的快速路径规划算法,如rrt(快速随机树)算法、概率路图法等,并通过添加简单的动态避障模块来处理设备之间的相互干扰问题。这些方法在处理小规模、低复杂度的路径规划任务时表现尚可。
2、然而,现有技术存在以下不足:首先,传统方法往往将路径规划问题简化为静态环境下的最短路径搜索,忽视了集装箱堆场中的集装箱与正面吊运机之间的动态耦合效应和时变约束条件;其次,现有的避障策略多基于简单的几何关系判断,无法有效处理多设备协同作业时的复杂交互场景;再次,传统方法缺乏对路径时空不确定性的系统建模和量化分析能力,导致在实际运行中容易出现路径冲突和效率损失;最后,现有技术普遍没有考虑设备动力学特性和环境约束的耦合影响,使得生成的路径在执行过程中可能出现不可行或不稳定的情况。
技术实现思路
1、本申请提供了一种集装箱堆场正面吊运机作业的路径规划仿真方法及系统,用于提高集装箱堆场正面吊运机作业的最优路径规划仿真的准确率。
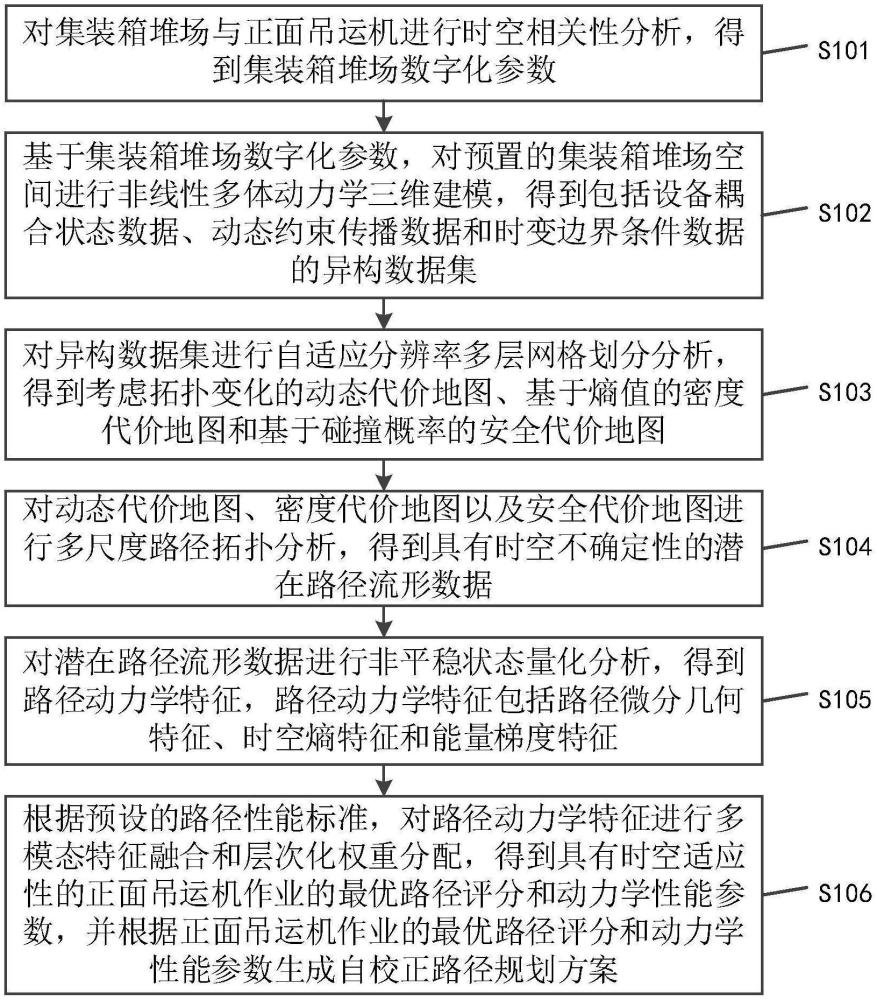
2、第一方面,本申请提供了一种集装箱堆场正面吊运机作业的路径规划仿真方法,所述集装箱堆场正面吊运机作业的路径规划仿真方法,包括:对集装箱堆场与正面吊运机进行时空相关性分析,得到集装箱堆场数字化参数;基于所述集装箱堆场数字化参数,对预置的集装箱堆场空间进行非线性多体动力学三维建模,得到包括设备耦合状态数据、动态约束传播数据和时变边界条件数据的异构数据集;对所述异构数据集进行自适应分辨率多层网格划分分析,得到考虑拓扑变化的动态代价地图、基于熵值的密度代价地图和基于碰撞概率的安全代价地图;对所述动态代价地图、所述密度代价地图以及所述安全代价地图进行多尺度路径拓扑分析,得到具有时空不确定性的潜在路径流形数据;对所述潜在路径流形数据进行非平稳状态量化分析,得到路径动力学特征,所述路径动力学特征包括路径微分几何特征、时空熵特征和能量梯度特征;根据预设的路径性能标准,对所述路径动力学特征进行多模态特征融合和层次化权重分配,得到具有时空适应性的正面吊运机作业的最优路径评分和动力学性能参数,并根据所述正面吊运机作业的最优路径评分和所述动力学性能参数生成自校正路径规划方案。
3、第二方面,本申请提供了一种集装箱堆场正面吊运机作业的路径规划仿真系统,所述集装箱堆场正面吊运机作业的路径规划仿真系统包括:
4、分析模块,用于对集装箱堆场与正面吊运机进行时空相关性分析,得到集装箱堆场数字化参数;
5、建模模块,用于基于所述集装箱堆场数字化参数,对预置的集装箱堆场空间进行非线性多体动力学三维建模,得到包括设备耦合状态数据、动态约束传播数据和时变边界条件数据的异构数据集;
6、划分模块,用于对所述异构数据集进行自适应分辨率多层网格划分分析,得到考虑拓扑变化的动态代价地图、基于熵值的密度代价地图和基于碰撞概率的安全代价地图;
7、拓扑模块,用于对所述动态代价地图、所述密度代价地图以及所述安全代价地图进行多尺度路径拓扑分析,得到具有时空不确定性的潜在路径流形数据;
8、量化模块,用于对所述潜在路径流形数据进行非平稳状态量化分析,得到路径动力学特征,所述路径动力学特征包括路径微分几何特征、时空熵特征和能量梯度特征;
9、分配模块,用于根据预设的路径性能标准,对所述路径动力学特征进行多模态特征融合和层次化权重分配,得到具有时空适应性的正面吊运机作业的最优路径评分和动力学性能参数,并根据所述正面吊运机作业的最优路径评分和所述动力学性能参数生成自校正路径规划方案。
10、本申请提供的技术方案中,通过对集装箱堆场与正面吊运机进行时空相关性分析获取集装箱堆场数字化参数,实现了堆场环境的精确数字化表达,有效反映了正面吊运机与堆场环境的动态交互关系。基于集装箱堆场数字化参数进行非线性多体动力学三维建模,得到了包含设备耦合状态数据、动态约束传播数据和时变边界条件数据的异构数据集,准确描述了多设备间的复杂耦合关系和动态约束条件。通过对异构数据集进行自适应分辨率多层网格划分分析,生成了考虑拓扑变化的动态代价地图、基于熵值的密度代价地图和基于碰撞概率的安全代价地图,实现了对路径规划环境的多维度评估。对这些代价地图进行多尺度路径拓扑分析,得到具有时空不确定性的潜在路径流形数据,有效捕捉了路径的动态变化特性。通过对潜在路径流形数据进行非平稳状态量化分析,得到包含路径微分几何特征、时空熵特征和能量梯度特征的路径动力学特征,全面表征了路径的几何和动力学属性。最后,基于预设的路径性能标准,对路径动力学特征进行多模态特征融合和层次化权重分配,得到具有时空适应性的正面吊运机作业的最优路径评分和动力学性能参数,并生成自校正路径规划方案,保证了规划方案的实时自适应性和鲁棒性。通过多层次的路径分析和特征提取,实现了对复杂堆场环境下正面吊运机非线性作业路径的精确规划,提高了路径规划的准确性和可靠性。
技术特征:
1.一种集装箱堆场正面吊运机作业的路径规划仿真方法,其特征在于,所述集装箱堆场正面吊运机作业的路径规划仿真方法包括:
2.根据权利要求1所述的集装箱堆场正面吊运机作业的路径规划仿真方法,其特征在于,所述对集装箱堆场与正面吊运机进行时空相关性分析,得到集装箱堆场数字化参数,包括:
3.根据权利要求1所述的集装箱堆场正面吊运机作业的路径规划仿真方法,其特征在于,所述基于所述集装箱堆场数字化参数,对预置的集装箱堆场空间进行非线性多体动力学三维建模,得到包括设备耦合状态数据、动态约束传播数据和时变边界条件数据的异构数据集,包括:
4.根据权利要求1所述的集装箱堆场正面吊运机作业的路径规划仿真方法,其特征在于,所述对所述异构数据集进行自适应分辨率多层网格划分分析,得到考虑拓扑变化的动态代价地图、基于熵值的密度代价地图和基于碰撞概率的安全代价地图,包括:
5.根据权利要求1所述的集装箱堆场正面吊运机作业的路径规划仿真方法,其特征在于,所述对所述动态代价地图、所述密度代价地图以及所述安全代价地图进行多尺度路径拓扑分析,得到具有时空不确定性的潜在路径流形数据,包括:
6.根据权利要求1所述的集装箱堆场正面吊运机作业的路径规划仿真方法,其特征在于,所述对所述潜在路径流形数据进行非平稳状态量化分析,得到路径动力学特征,所述路径动力学特征包括路径微分几何特征、时空熵特征和能量梯度特征,包括:
7.根据权利要求1所述的集装箱堆场正面吊运机作业的路径规划仿真方法,其特征在于,所述根据预设的路径性能标准,对所述路径动力学特征进行多模态特征融合和层次化权重分配,得到具有时空适应性的正面吊运机作业的最优路径评分和动力学性能参数,并根据所述正面吊运机作业的最优路径评分和所述动力学性能参数生成自校正路径规划方案,包括:
8.一种集装箱堆场正面吊运机作业的路径规划仿真系统,用于实现如权利要求1-7中任一项所述的集装箱堆场正面吊运机作业的路径规划仿真方法,其特征在于,所述集装箱堆场正面吊运机作业的路径规划仿真系统包括:
技术总结
本申请涉及路径分析技术领域,公开了一种集装箱堆场正面吊运机作业的路径规划仿真方法及系统。所述方法包括:对动态代价地图、密度代价地图及安全代价地图进行多尺度路径拓扑分析,得到潜在路径流形数据;对潜在路径流形数据进行非平稳状态量化分析,得到路径动力学特征,路径动力学特征包括路径微分几何特征、时空熵特征和能量梯度特征;根据预设的路径性能标准,对路径动力学特征进行多模态特征融合和层次化权重分配,得到具有时空适应性的正面吊运机作业的最优路径评分和动力学性能参数,根据正面吊运机作业的最优路径评分和动力学性能参数生成自校正路径规划方案。本申请提升了集装箱堆场正面吊运机作业的路径规划仿真的准确率。
技术研发人员:方曾利,王芳,梁亚莉,赵亚军,毕馨月,齐梦茹,郭永健,李杲岭,易真真,黄小雅,张秋月
受保护的技术使用者:郑州综合交通运输研究院有限公司
技术研发日:
技术公布日:2025/2/27
- 还没有人留言评论。精彩留言会获得点赞!