基于状态空间模型结合BP神经网络算法和遗传算法的微燃机控制方法
本发明属于微型燃气机控制,涉及一种基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法。
背景技术:
1、微型燃气轮机是一种小型化的燃气轮机,通常功率不超过1000kw,主要用于分布式发电、无人机、小型动力装置以及一些特定的工业应用中。微型燃气轮机控制系统是一套专门设计用于控制和管理微型燃气轮机运行的电子元器件系统。这些控制系统的设计和功能是确保燃气轮机在各种操作条件下高效、稳定且安全运行的关键。现有的微燃机的控制算法存在局部最优解和收敛慢的问题。
技术实现思路
1、本发明提供了一种基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法,提高控制的准确性,避免陷入局部最优解和收敛慢的问题。
2、本发明采用的技术方案是:
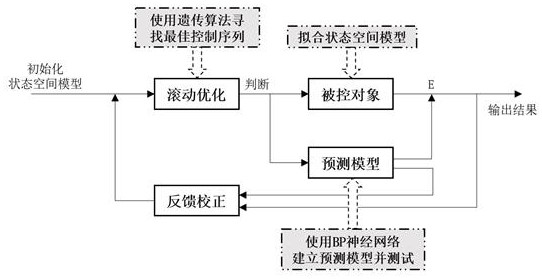
3、基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法,其具体步骤如下:
4、s1,建立微燃机的数学机理模型,确定输入量为空气流量、燃料量与空燃比,输出量为排烟温度与输出功率;
5、s2,通过仿真,拟合出传递函数并将其线性化,作为状态空间模型;
6、s3,对步骤s2的状态空间模型进行初始化;
7、s4,建立bp神经网络多步预测模型并训练;
8、s5,计算被控对象实际输出与bp神经网络多步预测模型输出的误差e;
9、s6,对bp神经网络多步预测模型的预测输出进行反馈校正;
10、s7,利用遗传算法得到一组最佳的控制序列。
11、进一步,还包括步骤s8,判断仿真时间是否小于预设的仿真时间,如果是,则进入步骤s3,如果否,则输出结果。
12、进一步,步骤s1中数学机理模型包括压气机模块、燃烧室模块、透平模块、转子模块、发电机模块和容积惯性模块。
13、进一步,步骤s1的微燃机采用capston离心式燃气轮机,并通过simulink仿真。
14、进一步,步骤s4的所述bp神经网络多步预测模型采取递推多步bp神经网络,构造单个神经网路模型进行多步预测,该神经网络的输入输出如下:
15、;
16、式中,u(k),u(k-1),… ,u(k-m+1)表示系统在不同时间步的输入变量或控制变量;y(k),…,y(k-n+1)表示系统在不同时间步的输出变量或被控变量的历史数据;表示模型在未来np个时间步的预测结果;m和n分别表示非线性系统输入量和输出量的阶次;np是预测时域或预测步长,x是bp神经网络的输入向量,y是bp神经网络的输出向量。
17、进一步,步骤s4的所述bp神经网络多步预测模型的bp神经网络训练过程包括:
18、s41,初始化神经网络:确认输入输出变量,需要预先设置输入层、隐层和输出层的节点数;其中,确认输入参数:空气流量、燃料量、空燃比;输出参数:输出功率,排烟温度;
19、s42,在确认输入参数后,进行输入参数归一化处理,离差标准化,是对原始数据的线性变换,使数值映射到[0-1,0]之间;转换函数如下:
20、;
21、其中,max为样本数据的最大值,min为样本数据值域最小值,x为样本数据抽样值,x*为线性变换后的数据值;
22、s43,在归一化处理之后,开始构件基础的神经网络,确定神经网络层数以及各层神经元的数量;
23、s44,在确认完每一层神经元数量之后,设置激励函数f(x):
24、;
25、其中,e为自然常数;
26、设置每个神经元的偏置量bias值,即每个神经元的默认权重值;
27、s45,利用遗传算法调整bp神经网络初始神经元之间的权重系数,使得误差函数e最小;
28、s46,通过多轮的学习,直到停止训练。
29、进一步,步骤s41中还需要设定学习率和激活函数,设定层间的权值和层内的阈值;
30、隐层计算:根据以下方程计算隐层输出h,其中f是激活函数,
31、;
32、式中,ωij是输入层第i个到隐层第j个节点的连接权值,xi是输入层第i个节点的输入值,aj是隐层第j个节点的偏置,n表示输入层的节点数量,l表示隐藏层的节点数量;
33、输出层计算:根据bp神经网络的隐层输出h、权值ωjk和阈值b计算预测值ok,
34、;
35、式中,ωjk是从隐层第j个节点到输出层第k个节点的权重,bk是输出层第k个节点的偏置,l表示输出层的节点数量,m表示输出层的节点数量。
36、进一步,步骤s43中神经元基函数为:
37、;
38、其中,u表示神经元函数。
39、进一步,步骤s45中通过遗传算法调整bp神经网络初始神经元之间的权值训练步骤如下:
40、s451,初始化种群,采取轮盘赌来获取种群,种群大小可以根据经验值确认,基本原理是对样本进行抽样计算,通过杂交操作来达到优化的目的;
41、s452,变异操作、变异率根据经验值来调整,并通过实验来确定;
42、s453,循环进行选择、交叉、变异、计算适应值操作,直到达到进化次数,得到最有的初始权值;
43、s454,获取神经网络初始权重,利用遗传算法初始化权重、阈值,当遗传算法执行完一代之后,新一代的权重重新插入神经网络;
44、s455,通过计算误差来判断是否达到可接受范围,可接受则训练结束;
45、s456,不断调整各层权重及其阈值;
46、s457,神经网络训练结束。
47、进一步,步骤s5的误差e计算公式如下:
48、;
49、其中,tj为期望值,yj为每个神经元的输出值,ep为一个神经层的误差和,e为整个神经网络的误差和,p表示为样本编号,p表示用于训练或测试的样本总数,j表示输出层中的节点编号,m表示输出层的节点数量。
50、本发明的有益效果:通过建立微型燃气轮机的数学机理模型并通过simulink来进行仿真操作,利用bp神经网络的特性作为预测模型,引入遗传算法来滚动优化控制流程,避免陷入局部最优解和收敛慢的问题。
技术特征:
1.基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法,其特征在于,具体步骤如下:
2.根据权利要求1所述的基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法,其特征在于:还包括步骤s8,判断仿真时间是否小于预设的仿真时间,如果是,则进入步骤s3,如果否,则输出结果。
3.根据权利要求1所述的基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法,其特征在于:步骤s1中数学机理模型包括压气机模块、燃烧室模块、透平模块、转子模块、发电机模块和容积惯性模块。
4.根据权利要求3所述的基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法,其特征在于:步骤s1的微燃机采用capston离心式燃气轮机,并通过simulink仿真。
5.根据权利要求1所述的基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法,其特征在于:步骤s4的所述bp神经网络多步预测模型采取递推多步bp神经网络,构造单个神经网路模型进行多步预测,该神经网络的输入输出如下:
6.根据权利要求5所述的基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法,其特征在于:步骤s4的所述bp神经网络多步预测模型的bp神经网络训练过程包括:
7.根据权利要求6所述的基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法,其特征在于:步骤s41中还需要设定学习率和激活函数,设定层间的权值和层内的阈值;
8.根据权利要求6所述的基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法,其特征在于:步骤s43中神经元基函数为:
9.根据权利要求6所述的基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法,其特征在于:步骤s45中通过遗传算法调整bp神经网络初始神经元之间的权值训练步骤如下:
10.根据权利要求1所述的基于状态空间模型结合bp神经网络算法和遗传算法的微燃机控制方法,其特征在于:步骤s5的误差e计算公式如下:
技术总结
本发明提供了一种基于状态空间模型结合BP神经网络算法和遗传算法的微燃机控制方法,其具体步骤如下:S1,建立微燃机的数学机理模型,确定输入量为空气流量、燃料量与空燃比,输出量为排烟温度与输出功率;S2,通过仿真,拟合出传递函数并将其线性化,作为状态空间模型;S3,对步骤S2的状态空间模型进行初始化;S4,建立BP神经网络多步预测模型并训练;S5,计算被控对象实际输出与BP神经网络多步预测模型输出的误差E;S6,对BP神经网络多步预测模型的预测输出进行反馈校正;S7,利用遗传算法得到一组最佳的控制序列。
技术研发人员:张梦婷,崔琛焕,陈锐,余恩慧,章宇杰
受保护的技术使用者:浙大城市学院
技术研发日:
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!