一种针对无人挖掘机的模型在线训练系统、方法、装置、设备和存储介质与流程
本申请涉及自动控制,具体而言,涉及一种针对无人挖掘机的模型在线训练系统、方法、装置、设备和存储介质。
背景技术:
1、随着智能化的普及和ai能力的提升,在挖掘机领域中,逐渐开始采用学习的方法来对无人挖掘机进行运动控制任务。轨迹跟踪是无人挖掘机运动控制中比较基础的任务,有很多基于学习的方法开始在该任务上进行尝试。基于学习的方法可以分为在线学习和离线学习,在线学习的模式中数据是源源不断在更新,并且训练好的模型可以直接在挖掘机上进行测试根据结果进行进一步的训练;离线学习一般是收集一堆数据,在固定的数据集中进行训练,模型的好坏需要在仿真环境下进行测试。因为一般很难构建一个逼真的仿真环境来测试模型,所以会选择在线学习的模式来进行轨迹跟踪。
2、基于在线学习的方案一般都会涉及到神经网络的学习,而目前为无人挖掘机部署的嵌入式系统的算力通常不高,如果将神经网络的在线学习也部署到挖掘机上面,那么挖掘机需要通过自身算力实现训练和推理过程,这样就会导致需要较长的时间进行训练和推理,进而会影响无人挖掘机的实时轨迹跟踪任务。
技术实现思路
1、有鉴于此,本申请实施例提供了一种针对无人挖掘机的模型在线训练系统、方法、装置、设备和存储介质,以降低对挖掘机的实时轨迹跟踪任务的影响。
2、第一方面,本申请实施例提供了一种针对无人挖掘机的模型在线训练系统,所述模型在线训练系统包括:高性能运算设备和无人挖掘机,所述高性能运算设备与无人挖掘机部署在同一局域网内;
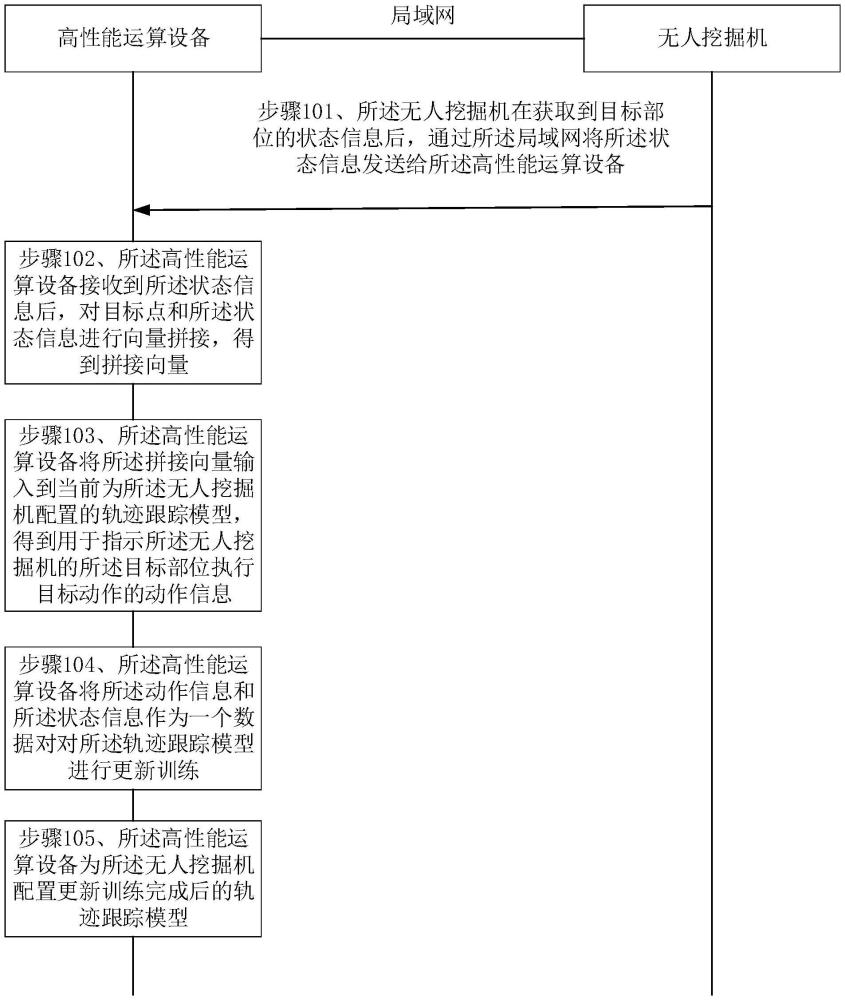
3、所述无人挖掘机在获取到目标部位的状态信息后,通过所述局域网将所述状态信息发送给所述高性能运算设备;
4、所述高性能运算设备接收到所述状态信息后,对目标点和所述状态信息进行向量拼接,得到拼接向量,其中,所述目标点是从轨迹库中选择的目标轨迹上确定出来的;
5、所述高性能运算设备将所述拼接向量输入到当前为所述无人挖掘机配置的轨迹跟踪模型,得到用于指示所述无人挖掘机的所述目标部位执行目标动作的动作信息;
6、所述高性能运算设备将所述动作信息和所述状态信息作为一个数据对对所述轨迹跟踪模型进行更新训练;
7、所述高性能运算设备为所述无人挖掘机配置更新训练完成后的轨迹跟踪模型。
8、第二方面,本申请实施例提供了一种针对无人挖掘机的模型在线训练方法,所述在线训练方法配置在高性能运算设备上,所述高性能运算设备和无人挖掘机构成模型在线训练系统,所述高性能运算设备和所述无人挖掘机部署在同一局域网内,所述方法包括:
9、在通过所述局域网接收到所述无人挖掘机发送的状态信息后,对目标点和所述状态信息进行向量拼接,得到拼接向量,其中,所述目标点是从轨迹库中选择的目标轨迹上确定出来的;
10、将所述拼接向量输入到当前为所述无人挖掘机配置的轨迹跟踪模型,得到用于指示所述无人挖掘机的目标部位执行目标动作的动作信息;
11、将所述动作信息和所述状态信息作为一个数据对对所述轨迹跟踪模型进行更新训练;
12、为所述无人挖掘机配置更新训练完成后的轨迹跟踪模型。
13、第三方面,本申请实施例提供了一种针对无人挖掘机的模型在线训练装置,所述在线训练装置设置在高性能运算设备上,所述高性能运算设备和无人挖掘机构成模型在线训练系统,所述高性能运算设备和所述无人挖掘机部署在同一局域网内,所述装置包括:
14、拼接单元,用于在通过所述局域网接收到所述无人挖掘机发送的状态信息后,对目标点和所述状态信息进行向量拼接,得到拼接向量,其中,所述目标点是从轨迹库中选择的目标轨迹上确定出来的;
15、训练单元,用于将所述拼接向量输入到当前为所述无人挖掘机配置的轨迹跟踪模型,得到用于指示所述无人挖掘机的目标部位执行目标动作的动作信息;
16、更新单元,用于将所述动作信息和所述状态信息作为一个数据对对所述轨迹跟踪模型进行更新训练;
17、配置单元,用于为所述无人挖掘机配置更新训练完成后的轨迹跟踪模型。
18、第四方面,本申请实施例提供了一种电子设备,包括:处理器、存储介质和总线,所述存储介质存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储介质之间通过总线通信,所述处理器执行所述机器可读指令,以执行如第二方面中任一项所述的在线训练方法的步骤。
19、第五方面,本申请实施例提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如第二方面中任一项所述的在线训练方法的步骤。
20、本申请的实施例提供的技术方案可以包括以下有益效果:
21、在本申请中,将高性能运算设备和无人挖掘机部署在同一局域网内,这样可以使高性能运算设备和无人挖掘机进行通信,其中,高性能运算设备上部署了无人挖掘机的轨迹跟踪模型,以及对轨迹跟踪模型进行在线训练,即:由高性能运算设备完成针对无人挖掘机的轨迹跟踪的推理和训练,而无人挖掘机只需要根据高性能运算设备推理出的结果执行相应的控制就可以实现轨迹跟踪,并且高性能运算设备使用的轨迹跟踪模型是利用在线学习的方式进行的训练,因此推理使用的轨迹跟踪模型是当前更新后的轨迹跟踪模型,有利于提高无人挖掘机控制的正确性,由于推理和训练是由高性能运算设备完成的,不占用无人挖掘机自身的算力,因此有利于降低对无人挖掘机的实时轨迹跟踪任务的影响。
22、为使本申请的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
技术特征:
1.一种针对无人挖掘机的模型在线训练系统,其特征在于,所述模型在线训练系统包括:高性能运算设备和无人挖掘机,所述高性能运算设备与无人挖掘机部署在同一局域网内;
2.如权利要求1所述的在线训练系统,其特征在于,所述无人挖掘机在发送所述状态信息时,通过所述局域网将自身的安全信息发送给高性能运算设备;
3.如权利要求1所述的在线训练系统,其特征在于,所述高性能运算设备将所述数据对存储在数据存储装置中;
4.如权利要求1所述的在线训练系统,其特征在于,所述高性能运算设备在得到所述动作信息后,将所述动作信息通过所述局域网发送给所述无人挖掘机;
5.如权利要求4所述的在线训练系统,其特征在于,所述无人挖掘机在接收到所述动作信息后,将待控制部位的控制信息添加到所述动作信息中,得到集合控制指令;
6.如权利要求2所述的在线训练系统,其特征在于,所述无人挖掘机按照预设采集周期采集自身的部位执行信息;
7.如权利要求6所述的在线训练系统,其特征在于,所述无人挖掘机对所述部位执行信息进行解析,得到所述状态信息;
8.如权利要求1所述的在线训练系统,其特征在于,所述状态信息包括:所述无人挖掘机的大臂、小臂和座舱在当前时间点的位置信息和速度信息。
9.一种针对无人挖掘机的模型在线训练方法,其特征在于,所述在线训练方法配置在高性能运算设备上,所述高性能运算设备和无人挖掘机构成模型在线训练系统,所述高性能运算设备和所述无人挖掘机部署在同一局域网内,所述方法包括:
10.如权利要求9所述的在线训练系统,其特征在于,所述方法还包括:
11.如权利要求9所示的在线训练方法,其特征在于,所述方法还包括:
12.如权利要求9所述的方法在线训练方法,其特征在于,所述方法还包括:
13.一种针对无人挖掘机的模型在线训练装置,其特征在于,所述在线训练装置设置在高性能运算设备上,所述高性能运算设备和无人挖掘机构成模型在线训练系统,所述高性能运算设备和所述无人挖掘机部署在同一局域网内,所述装置包括:
14.一种电子设备,其特征在于,包括:处理器、存储介质和总线,所述存储介质存储有所述处理器可执行的机器可读指令,当电子设备运行时,所述处理器与所述存储介质之间通过总线通信,所述处理器执行所述机器可读指令,以执行如权利要求9至12中任一项所述的在线训练方法的步骤。
15.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器运行时执行如权利要求9至12中任一项所述的在线训练方法的步骤。
技术总结
本申请提供了一种针对无人挖掘机的模型在线训练系统、方法、装置、设备和存储介质,在本申请中,将高性能运算设备和无人挖掘机部署在同一局域网内,这样可以使高性能运算设备和无人挖掘机进行通信,其中,高性能运算设备上部署了无人挖掘机的轨迹跟踪模型,以及对轨迹跟踪模型进行在线训练,即:由高性能运算设备完成针对无人挖掘机的轨迹跟踪的推理和训练,由于推理和训练是由高性能运算设备完成的,不占用无人挖掘机自身的算力,因此有利于降低对无人挖掘机的实时轨迹跟踪任务的影响。
技术研发人员:胡玥,陈赢峰,范长杰,胡志鹏
受保护的技术使用者:网易灵动(杭州)科技有限公司
技术研发日:
技术公布日:2025/2/24
- 还没有人留言评论。精彩留言会获得点赞!