一种深度学习的机器人3D视觉定位误差校正方法及系统
本发明涉及机器人视觉定位,特别是指一种深度学习的机器人3d视觉定位误差校正方法及系统。
背景技术:
1、随着机器人技术的快速发展,智能机器人在工业自动化、无人驾驶、服务机器人等领域得到了广泛应用。在这些应用场景中,准确的定位与导航是实现机器人自主操作的关键。然而,机器人在复杂环境中的定位精度常常受到多种因素的影响,包括传感器噪声、环境光照变化、动态障碍物和测量误差等。这些因素会导致机器人的位置信息产生偏差,影响其工作效率和安全性。
2、传统的定位方法主要依赖于几何计算、传感器融合和滤波技术等。然而,这些方法在处理非线性和动态环境时,往往难以达到理想的效果。例如,卡尔曼滤波器(kalmanfilter)在处理高噪声和快速变化的环境时,可能会产生较大的误差。而基于特征提取的视觉定位方法则受到环境特征稀疏和光照变化的限制,难以保证稳定的性能。
3、近年来,深度学习技术的迅速发展为解决上述问题提供了新的思路。深度学习模型,尤其是卷积神经网络(convolutional neural networks,cnns),在图像识别和特征提取方面表现出了优越的性能。通过对大量数据的训练,深度学习模型能够自动学习到高维特征,从而提高定位的准确性和鲁棒性。然而,现有的深度学习方法在实际应用中仍面临定位误差校正不足的问题,尤其是在动态环境下。
技术实现思路
1、为了解决现有技术中机器人在复杂环境中定位精度不足、误差校正效率低下的技术问题,本发明提供了一种深度学习的机器人3d视觉定位误差校正方法及系统。
2、本发明提供的技术方案如下:
3、第一方面:
4、本发明提供的一种深度学习的机器人3d视觉定位误差校正方法,包括:
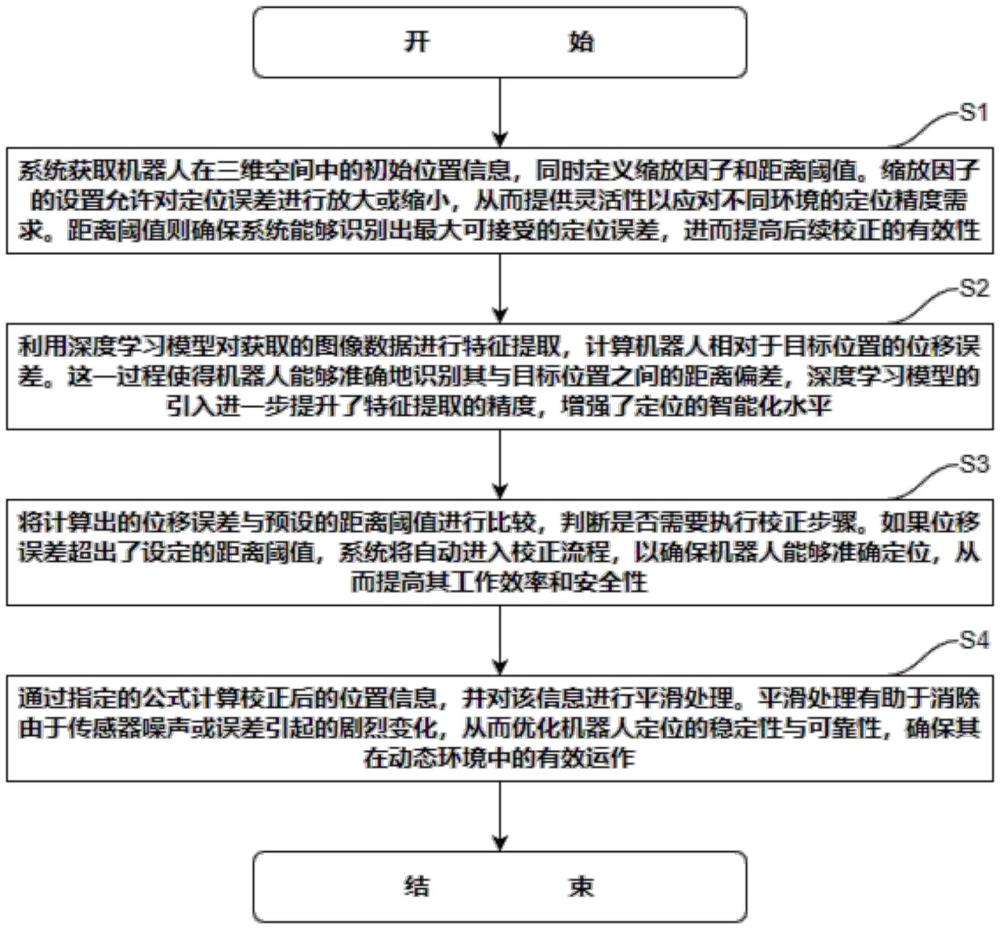
5、s1、获取机器人在三维空间中的初始位置信息pinitial,并定义缩放因子rscale和距离阈值dthreshold,所述缩放因子的取值范围为(0,2),表示对误差的放大或缩小,所述距离阈值单位为米,表示最大可接受的定位误差;
6、s2、利用深度学习模型从获取的图像数据中提取特征,计算机器人相对于目标位置的位移误差epos=ptarget-pcurrent,其中,ptarget为目标位置,pcurrent为当前位置信息;
7、s3、将所述位移误差和所述距离阈值进行比较,如果||epos||>dthreshold,执行校正步骤;
8、s4、所述校正步骤通过下式计算:
9、pcurrected=pcurrent+rscale·epos
10、其中,pcorrected为校正后的位置信息,之后对校正后的信息进行平滑处理。
11、第二方面:
12、本发明提供的一种深度学习的机器人3d视觉定位误差校正系统,包括:
13、处理器;
14、存储器,所述存储器上存储有计算机可读指令,所述计算机可读指令被所述处理器执行时,实现如第一方面所述的深度学习的机器人3d视觉定位误差校正方法。
15、本发明提供的技术方案带来的有益效果至少包括:
16、(1)在本发明中,通过深度学习模型的特征提取能力,显著提高了机器人在复杂环境中对位移误差的识别精度。这一创新使得机器人能够更加准确地定位自身相对于目标的位置,减少因传感器噪声和环境变化带来的影响,从而提升了整体定位的可靠性和稳定性。这种高精度的误差校正能力,有助于机器人在执行自主导航和任务时,显著降低潜在的安全风险;
17、(2)在本发明中,动态校正机制的引入使得机器人能够实时响应环境变化。当检测到位移误差超过设定的距离阈值时,系统能够快速执行校正步骤,从而有效减少定位误差。这种实时调整的能力使得机器人在复杂和动态的工作环境中更加灵活,能够适应快速变化的条件,提升了工作效率;
18、(3)在本发明中,融合多传感器数据的方法有效增强了信息的完整性和冗余性。通过结合视觉传感器、激光雷达和惯性测量单元的数据,系统能够在信息丢失或单一传感器失效的情况下,仍然保持较高的定位准确度。这种冗余设计提高了系统的鲁棒性,确保机器人在多种工作条件下均能稳定运行,从而拓宽了其应用范围。
技术特征:
1.一种深度学习的机器人3d视觉定位误差校正方法,其特征在于,包括:
2.根据权利要求1所述的一种深度学习的机器人3d视觉定位误差校正方法,其特征在于,所述位移误差的具体计算方法包括:
3.根据权利要求1所述的一种深度学习的机器人3d视觉定位误差校正方法,其特征在于,所述深度学习模型进一步包括:
4.根据权利要求3所述的一种深度学习的机器人3d视觉定位误差校正方法,其特征在于,包括:
5.根据权利要求1所述的一种深度学习的机器人3d视觉定位误差校正方法,其特征在于,所述平滑处理具体包括:
6.根据权利要求5所述的一种深度学习的机器人3d视觉定位误差校正方法,其特征在于,所述平滑因子的动态调整过程具体包括:
7.根据权利要求1所述的一种深度学习的机器人3d视觉定位误差校正方法,其特征在于,所述目标位置获得方法具体包括:
8.根据权利要求7所述的一种深度学习的机器人3d视觉定位误差校正方法,其特征在于,所述目标位置的融合计算具体包括:
9.根据权利要求8所述的一种深度学习的机器人3d视觉定位误差校正方法,其特征在于,所述目标位置的动态调整过程具体包括:
10.一种深度学习的机器人3d视觉定位误差校正系统,其特征在于,包括:
技术总结
本发明提供一种深度学习的机器人3D视觉定位误差校正方法及系统,涉及机器人视觉定位技术领域,方法包括:获取机器人在三维空间中的初始位置信息、利用深度学习模型提取图像特征、计算位移误差并与距离阈值进行比较、执行校正步骤。通过多传感器数据融合和动态调整目标位置,优化机器人在复杂环境中的定位精度和可靠性。本发明的目的是通过深度学习和多传感器融合技术,提升机器人在三维空间中的定位准确性,减少由于环境变化和传感器误差造成的定位偏差,从而实现更加智能化和自主化的机器人导航能力。
技术研发人员:毛贺,夏林中,卢忱,高波,赖周艺,杨洋,张晓莉,何懂,王贝
受保护的技术使用者:深圳信息职业技术学院
技术研发日:
技术公布日:2025/1/9
- 还没有人留言评论。精彩留言会获得点赞!