一种基于关键邻居预测信息的多智能体系统一致性方法
本发明涉及多智能体系统一致性领域,具体涉及一种基于关键邻居预测信息的多智能体系统一致性算法。
背景技术:
0、技术背景
1、多智能体系统是一种新型的分布式控制系统,涉及到由多个智能体组成的集合体,这些智能体通过相互通信和协作来完成共同点任务和目标,在机器人编队控制、控制理论、网络科学、机器学习等领域得到了广泛的研究和应用。相比与中央控制器的传统的集中控制系统,分布式控制的多智能体系统所具有的优势主要表现为:系统功能强大,强鲁棒性、高可拓展性、高灵活性。多智能体系统的一致性问题是多智能体系统研究领域的基本问题之一,其主要是专注于控制理论和代数图论为共识行为设计适当的协议,使得每个智能体在只使用局部感知的信息情况下,在有限的时间内达成全局共识。
2、在现有的分布式系统中,离散时间模型存在智能体初始数量和拓扑结构的不确定性,这会导致过多的邻居会影响一致性的效果。目前,有多种一致性方法,虽然能够最终达成一致,但通常会考虑所有智能体的信息,导致系统收敛缓慢。为此,本发明提出一种基于关键邻居预测信息的多智能体系统一致性方法。
技术实现思路
1、本发明目的是克服现有的一致性算法考虑过多邻居信息导致收敛过慢的问题,提供了一种基于关键邻居预测信息的算法,对智能体的邻居进行重要性划分,选取更有价值的邻居进行通信,降低了通信代价,提升了收敛速度。
2、本发明中提出的关键邻居预测信息收敛算法,通过对邻居进行重要性划分,选取更关键的邻居的预测信息来进行状态更新和演化,具体步骤如下:
3、步骤一:分布式离散时间模型切换拓扑结构下,在k时刻,智能体i扫描所有邻居智能体,存储邻居信息ni(k);
4、步骤二:智能体i根据邻居集ni(k),将二跳度中心性thkj,距离dkij,聚类系数clcj作为重要性指标构造一个多属性决策矩阵d;
5、步骤三:对决策矩阵d进行归一化处理,得到归一化矩阵r;
6、步骤四:根据归一化矩阵r及信息熵公式计算得出各属性指标的信息熵hy;
7、步骤五:由各属性指标的信息熵hy及熵权法得到各属性指标的权重wy;
8、步骤六:根据归一化后的索引riy和最终得到的权重wy,计算得出mlwc值;
9、步骤七:智能体i选择mlwc值高的四个邻居,将所选的智能体邻居更新邻居集为φi(k);
10、步骤八:邻居集φi(k)内的智能体分别取各自邻域形成的外圆圆心作为预测点,得到预测点集信息tpi(k),智能体i将预测信息tpi(k)作为控制输入,通过控制输入量来更新自身的状态信息。
技术特征:
1.一种基于关键邻居预测信息的多智能体系统一致性算法,其特征在于,能有有效结合关键智能体邻居的信息,步骤如下:
2.根据权利要求1所述的关键邻居预测信息的多智能体系统一致性算法,其特征在于,网络的拓扑结构是时变的,用邻接矩阵a来表示拓扑结构,则在切换拓扑结构下,a用a(k)来表示。
3.根据权利要求1所述的关键邻居预测信息的多智能体系统一致性算法,其特征在于,多智能体系统是一个状态依赖的拓扑结构,智能体的位置信息表示的是其状态信息,只考虑智能体的二维坐标信息,智能体下一时刻位置由其关键邻居的位置共同决定,其下一时刻的状态信息可表示为,其一致性协议可表示为:
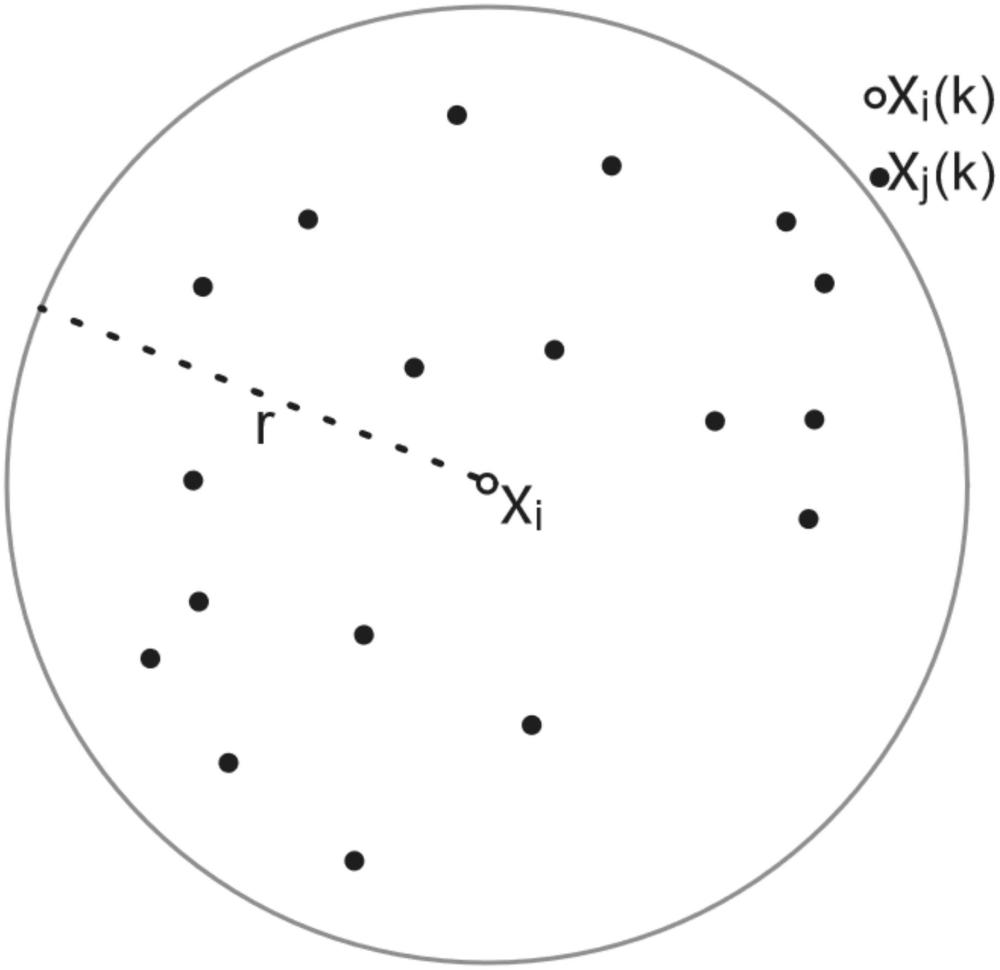
4.根据权利要求1所述的关键邻居预测信息的多智能体系统一致性算法,其特征在于,其邻居ni(k)的定义可比表示为在k时刻,对于任意智能体i,j,若||xi(k)-xj(k)||≤r,r为智能体的通信半径,则智能体i,j互为邻居。
5.根据权利要求4所述的关键邻居预测信息的多智能体系统一致性算法,其特征在于,智能体达到聚集的条件是,对于任意的智能体i,j,若满足条件limx→∞||xi-xj||=0,则我们称系统达到一致,即完成了聚集的任务。
6.根据权利要求1所述的关键邻居预测信息的多智能体系统一致性算法,其特征在于,降低了通信代价,加快了系统的收敛速度,进而增强了一致性。
技术总结
本发明设计了一种基于关键邻居预测信息收敛算法,包括关键邻居选取策略,预测信息获取策略。该算法通过对智能体的邻居进行重要性区分,选取更具有代表性的关键邻居智能体进行通信、状态更新和状态演化。智能体的通信半径设为一个固定的值,从而获取某一时刻智能体i的邻居集,智能体i从邻居信息中选取三种局部属性信息,通过构造多属性决策矩阵对每个邻居计算其重要性值,根据重要性值选取具有代表性的关键邻居进行通信和状态演化。进而设计了预测信息获取策略,利用关键邻居的预测信息进行收敛,以提升收敛速度。本发明算法能够适应不同密度范围,提升收敛速度。
技术研发人员:张能波
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2025/3/3
- 还没有人留言评论。精彩留言会获得点赞!