高速飞行器气动力-热-结构多场耦合智能预测方法与流程
本发明属于高速飞行器设计,涉及高速飞行器气动力-热-结构多场耦合智能预测方法。
背景技术:
1、高速飞行器面临复杂的多物理场耦合问题,导致结构状态在线预测困难,每个物理场具备不同的特性,且分析方法各有不同,难以获得较为准确的结构响应,因此,探索不同物理场之间的耦合关系,准确预测飞行器的气动力/热环境、结构温度、应力和位移状态,对于高速飞行器的研制具有重要意义。
2、目前,高速飞行器面临越来越复杂的任务需求,飞行轨迹更为复杂,气动加热作用对结构所产生的高温及温度梯度会使结构材料力学性能下降,结构内部不均匀的热变形及热应力会改变结构的刚度特性,同时还会改变结构的固有振动特性。复杂轨迹下,对整个轨迹开展时域动气动弹性分析的代价巨大,其中的流体力学问题维度高、非线性强、数据量大等特点。虽然计算结构力学求解不如计算流体力学对从几万到几千万网格求解n-s方程一般耗时往往达到数小时甚至数天的量级,但动辄几万到几十万网格的微分方程求解耗时也往往达到了数分钟甚至数小时的量级,这在多场耦合计算当中也是不容忽视的。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出高速飞行器气动力-热-结构多场耦合智能预测方法,对模拟仿真的气动力-热-结构耦合数据进行人工智能算法离线学习建模后,实现输入飞行轨迹,快速预测输出飞行器特征点数据沿飞行轨迹变化的数据。
2、本发明解决技术的方案是:
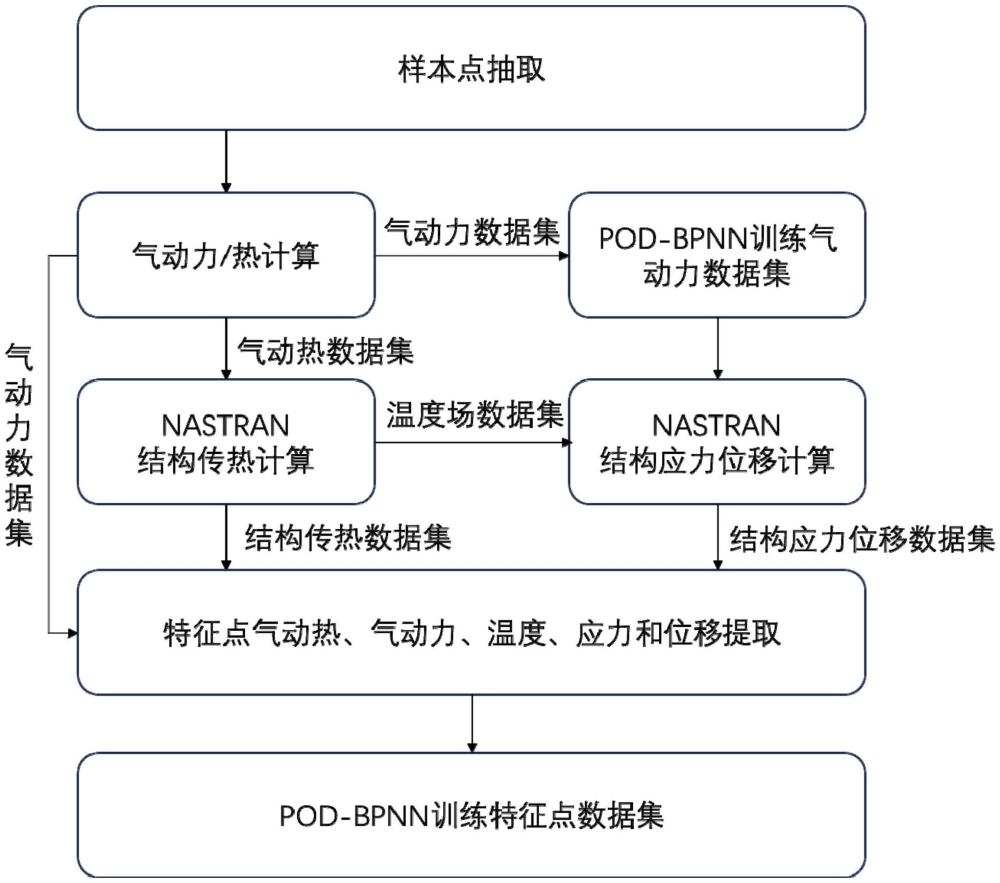
3、高速飞行器气动力-热-结构多场耦合智能预测方法,包括:
4、步骤一、根据飞行器飞行轨迹,抽取用于计算气动力和气动热状态的样本参数;
5、步骤二、对飞行器进行建模,根据步骤一抽取的样本参数,模拟计算获取气动力和气动热数据集;
6、步骤三、根据步骤二的气动热数据集,计算沿轨迹的飞行器温度场;
7、步骤四、对步骤二的气动力数据集进行训练,获得气动力预测模型;
8、步骤五、根据步骤三中沿轨迹的飞行器温度场和步骤四中气动力预测模型,计算飞行器模型的结构应力位移场数据;
9、步骤六、获得特征点数据集;
10、步骤七、对特征点数据集进行训练,得到精确的预测结果。
11、在上述的高速飞行器气动力-热-结构多场耦合智能预测方法,所述步骤一中,采用均匀采样的方法抽取样本参数;样本参数包括飞行器的壁面温度、飞行高度、攻角和马赫数。
12、在上述的高速飞行器气动力-热-结构多场耦合智能预测方法,所述步骤二中,模拟计算气动力和气动热的方法为:
13、对飞行器模型划分气动网格;将样本参数作为边界条件输入;数值仿真模拟,获得气动力和气动热数据集。
14、在上述的高速飞行器气动力-热-结构多场耦合智能预测方法,所述步骤三中,沿轨迹的飞行器温度场的计算方法为:
15、s31、通过气动热数据集插值计算获得tn时刻的节点气动热;
16、s32、设定t0时刻飞行器初始结构温度场为已知、辐射边界条件为已知;根据飞行器飞行轨迹,热载荷为已知;迭代获得tn时刻飞行器初始结构温度场;
17、s33、在飞行器模型上施加s31的tn时刻的节点气动热、辐射边界条件、tn时刻飞行器初始结构温度场,nastran软件进行瞬态结构传热分析得到tn+1时刻的结构温度场;
18、s34、从tn+1时刻的结构温度场中的飞行器表面温度作为tn+1时刻的节点气动热,将tn+1时刻的结构温度场作为tn+1时刻飞行器初始结构温度场;循环步骤s31-s33,获得沿轨迹的飞行器温度场。
19、在上述的高速飞行器气动力-热-结构多场耦合智能预测方法,所述s33中,迭代获得tn时刻飞行器初始结构温度场的方法为:
20、在t0时刻飞行器初始结构温度场基础上,输入热载荷作为飞行器模型的载荷变量,迭代获得tn时刻飞行器初始结构温度场。
21、在上述的高速飞行器气动力-热-结构多场耦合智能预测方法,所述步骤四中,对步骤二的气动力数据集进行训练的方法为:
22、s41、采用pod方法对气动力数据进行降阶;
23、s42、根据样本参数与降阶的气动力数据之间的映射关系,采用bp神经网络训练,获得气动力预测模型。
24、在上述的高速飞行器气动力-热-结构多场耦合智能预测方法,所述步骤五中,计算飞行器模型的结构应力位移的方法为:
25、s51、根据气动力预测模型,计算tn时刻节点气动力;
26、s52、将tn时刻节点气动力和步骤三中沿轨迹的飞行器温度场施加在飞行器模型上,采用nastran软件进行结构强度分析得到结构应力和位移场;
27、s53、进入tn+1时刻循环s51-s52,获得沿轨迹的飞行器结构应力和位移场数据。
28、在上述的高速飞行器气动力-热-结构多场耦合智能预测方法,所述s51中,获得tn时刻节点气动力的方法为:
29、将tn时刻飞行器的高度、攻角、马赫数作为气动力预测模型的输入,输出tn时刻节点气动力。
30、在上述的高速飞行器气动力-热-结构多场耦合智能预测方法,所述步骤六中,获得特征点数据集的方法为:
31、在步骤二中的气动力数据集、步骤三的飞行器温度场、步骤五的飞行器模型的结构应力位移场数据中,提取关注的飞行器特征点相应数据,获得特征点数据集。
32、在上述的高速飞行器气动力-热-结构多场耦合智能预测方法,所述步骤七中,对特征点数据集进行训练的方法为:
33、s71、采用pod方法对特征点数据集进行降阶;
34、s72、针对飞行轨迹和降阶后的特征点数据集之间的映射关系,采用bp神经网络进行训练。
35、本发明与现有技术相比的有益效果是:
36、(1)本发明基于模拟仿真获得的气动力-热-结构多场域数据集,采用本征正交分解(proper orthogonal decomposition,pod)和反向传播神经网络(bpnn)方法,对多场域数据集进行离线训练学习,建立了快速、高精度的高速气动力-热-结构多场耦合效应智能预测方法;
37、(2)本发明对模拟仿真获取的大量数据集,基于机器学习方法擅长处理和分析大规模数据集,能够从中发现人类难以察觉的模式和关联的特点,引入bp网络对数据集进行训练;
38、(3)本发明通过引入pod方法在保证数据特征的前提下实现对高维数据降阶,bp网络对降阶后的数据进行训练,大大减小了模型训练的耗时和内存占用;
39、(4)本发明依据训练完成的智能预测模型,输入飞行器飞行轨迹,秒量级内实现飞行器的特征点气动力、气动热、温度、应力和位移的预测输出。
技术特征:
1.高速飞行器气动力-热-结构多场耦合智能预测方法,其特征在于:包括:
2.根据权利要求1所述的高速飞行器气动力-热-结构多场耦合智能预测方法,其特征在于:所述步骤一中,采用均匀采样的方法抽取样本参数;样本参数包括飞行器的壁面温度、飞行高度、攻角和马赫数。
3.根据权利要求1所述的高速飞行器气动力-热-结构多场耦合智能预测方法,其特征在于:所述步骤二中,模拟计算气动力和气动热的方法为:
4.根据权利要求1所述的高速飞行器气动力-热-结构多场耦合智能预测方法,其特征在于:所述步骤三中,沿轨迹的飞行器温度场的计算方法为:
5.根据权利要求4所述的高速飞行器气动力-热-结构多场耦合智能预测方法,其特征在于:所述s33中,迭代获得tn时刻飞行器初始结构温度场的方法为:
6.根据权利要求1所述的高速飞行器气动力-热-结构多场耦合智能预测方法,其特征在于:所述步骤四中,对步骤二的气动力数据集进行训练的方法为:
7.根据权利要求1所述的高速飞行器气动力-热-结构多场耦合智能预测方法,其特征在于:所述步骤五中,计算飞行器模型的结构应力位移的方法为:
8.根据权利要求7所述的高速飞行器气动力-热-结构多场耦合智能预测方法,其特征在于:所述s51中,获得tn时刻节点气动力的方法为:
9.根据权利要求1所述的高速飞行器气动力-热-结构多场耦合智能预测方法,其特征在于:所述步骤六中,获得特征点数据集的方法为:
10.根据权利要求1所述的高速飞行器气动力-热-结构多场耦合智能预测方法,其特征在于:所述步骤七中,对特征点数据集进行训练的方法为:
技术总结
本发明涉及高速飞行器气动力-热-结构多场耦合智能预测方法,属于高速飞行器设计技术领域;根据飞行器飞行轨迹,抽取用于计算气动力和气动热状态的样本参数;对飞行器进行建模,模拟计算获取气动力和气动热数据集;计算沿轨迹的飞行器温度场;对气动力数据集进行训练,获得气动力预测模型;计算飞行器模型的结构应力位移场数据;在气动力数据集、飞行器温度场、飞行器模型的结构应力位移场数据中,提取关注的飞行器特征点相应数据,获得特征点数据集;对特征点数据集进行训练,得到精确的预测结果;本发明对模拟仿真的气动力-热-结构耦合数据进行人工智能算法离线学习建模后,实现输入飞行轨迹,快速预测输出飞行器特征点数据沿飞行轨迹变化的数据。
技术研发人员:汪小卫,艾立强,徐振亮,陈蓉,邓思超,林明月,庄方方,孔令超,张翼,任宽,张升升,毛羽
受保护的技术使用者:中国运载火箭技术研究院
技术研发日:
技术公布日:2025/3/10
- 还没有人留言评论。精彩留言会获得点赞!