基于聚类和偏差阈值修正筛选的公交轨迹挖掘方法及应用与流程
本发明涉及智能交通,尤其涉及一种基于聚类和偏差阈值修正筛选的公交轨迹挖掘方法及应用。
背景技术:
1、智能交通是未来城市管理的重要组成部分,而公共交通工具,诸如地铁、公交车等具有运量大、成本低、安全环保的优势,是智能化交通管理的重中之重。
2、对公交gps数据进行处理与分析,能够从中准确提取公交线路的具体轨迹,而其又是进行公交站距计算、公交电子围栏绘制、路况分析以及公交到站时间预测的基础,对公交公司进行公交实时监控、公交报表统计以及公交大数据分析有着重要意义。
3、虽然gps已经较为准确,但是由于信号干扰、地形、天气、设备稳定性等因素的影响,仍旧会出现偏移的问题,而目前,利用聚类算法对多辆车的轨迹进行相似度计算是轨迹挖掘的常见方法,然而,由于上述问题,一些异常轨迹点无法做到完全筛除,即使利用多辆车的轨迹进行相似度计算和提取也会使得计算复杂度过高并且无法完全避免异常点的连接,导致轨迹的准确性受影响,可见,现有技术在处理轨迹数据时仍然存在一定的局限性。
技术实现思路
1、针对现有技术的不足,本发明的目的在于提供一种基于聚类和偏差阈值修正筛选的公交轨迹挖掘方法及应用。
2、为实现前述发明目的,本发明采用的技术方案包括:
3、第一方面,本发明提供一种基于聚类和偏差阈值修正筛选的公交轨迹挖掘方法,其包括:
4、获取同一线路中的多个公交车的gps原始数据;
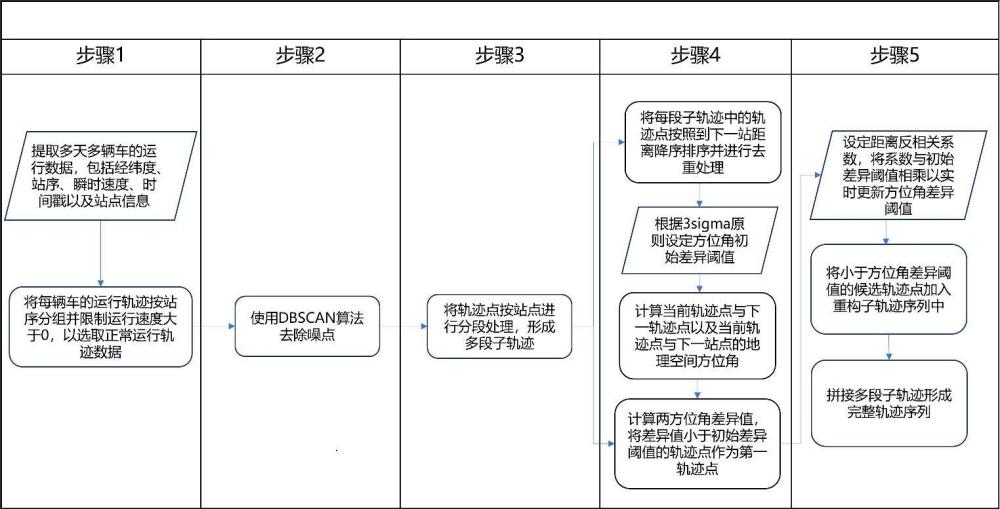
5、对所述gps原始数据进行聚类处理,形成若干簇,剔除不属于任一簇的数据点,获得聚类筛选数据;
6、将所述聚类筛选数据按照站序进行分段,形成多段数据;
7、对所述多段数据中的任一段,计算目标数据点指向下一数据点的第一方位角,以及指向段尾站的第二方位角,计算所述第一方位角和第二方位角的角度偏差值;
8、统计所述角度偏差值的分布,设定初始阈值,使得高于所述初始阈值的角度偏差值所占比例为预设比例;
9、基于所述目标数据点与段尾站之间的到站距离计算修正因子,所述修正因子与所述到站距离具有反相关的趋势且始终为正值;
10、基于所述修正因子与所述初始阈值的乘积计算筛选阈值,并剔除对应的所述第一方位角在所述筛选阈值以上的部分目标数据点,得到方位角筛选数据;
11、基于所述方位角筛选数据,提取所述线路对应的公交轨迹。
12、第二方面,本发明还提供一种上述公交轨迹挖掘方法在公交运营管理中的应用。
13、第三方面,本发明还提供一种基于多目标车辆gps数据聚类的公交轨迹挖掘系统,其包括:
14、数据获取模块,用于获取同一线路中的多个公交车的gps原始数据;
15、聚类筛选模块,用于对所述gps原始数据进行聚类处理,形成若干簇,剔除不属于任一簇的数据点,获得聚类筛选数据;
16、分段模块,用于将所述聚类筛选数据按照站序进行分段,形成多段数据;
17、角度偏差模块,用于对所述多段数据中的任一段,计算目标数据点指向下一数据点的第一方位角,以及指向段尾站的第二方位角,计算所述第一方位角和第二方位角的角度偏差值;
18、初始阈值模块,用于统计所述角度偏差值的分布,设定初始阈值,使得高于所述初始阈值的角度偏差值所占比例为预设比例;
19、修正因子模块,用于基于所述目标数据点与段尾站之间的到站距离计算修正因子,所述修正因子与所述到站距离反相关且始终为正值;
20、阈值筛选模块,用于基于所述修正因子与所述初始阈值的乘积计算筛选阈值,并剔除对应的所述第一方位角在所述筛选阈值以上的部分目标数据点,得到方位角筛选数据;
21、轨迹提取模块,用于基于所述方位角筛选数据,提取所述线路对应的公交轨迹。
22、基于上述技术方案,与现有技术相比,本发明的有益效果至少包括:
23、本发明所提供的公交轨迹挖掘方法首先基于无监督聚类算法和方位角差异的筛选规则来聚合线路轨迹,利用多辆公交车gps数据相互补充,降低异常点对轨迹分析的影响;此外本发明还提出了针对方位角差异筛选的基于到站距离反相关的修正算法,针对到站距离的不同设定不同的角度差异筛选力度,避免不同位置的筛选过于严格或过于松弛,最终提供了高精度和高可信度的轨迹数据,给智能化交通管理创造了有利条件。
24、上述说明仅是本发明技术方案的概述,为了能够使本领域技术人员能够更清楚地了解本申请的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合详细附图说明如后。
技术特征:
1.一种基于聚类和偏差阈值修正筛选的公交轨迹挖掘方法,其特征在于,包括:
2.根据权利要求1所述的公交轨迹挖掘方法,其特征在于,所述初始阈值的确定过程表示为:
3.根据权利要求1所述的公交轨迹挖掘方法,其特征在于,所述修正因子为非线性函数,且设置上限值和下限值。
4.根据权利要求3所述的公交轨迹挖掘方法,其特征在于,所述修正因子的计算方式表示为:
5.根据权利要求1所述的公交轨迹挖掘方法,其特征在于,所述角度偏差值的计算过程表示为:
6.根据权利要求1所述的公交轨迹挖掘方法,其特征在于,所述聚类筛选数据的获取过程具体包括:
7.根据权利要求1所述的公交轨迹挖掘方法,其特征在于,在进行所述聚类处理前,还包括:
8.根据权利要求1或7所述的公交轨迹挖掘方法,其特征在于,所述gps原始数据包括公交车的经纬度、站序、瞬时速度、时间戳。
9.权利要求1-8中任意一项所述的公交轨迹挖掘方法在公交运营管理中的应用。
10.一种基于多目标车辆gps数据聚类的公交轨迹挖掘系统,其特征在于,包括:
技术总结
本发明公开了一种基于聚类和偏差阈值修正筛选的公交轨迹挖掘方法及应用。所述方法包括:获取原始数据;进行聚类处理剔除部分数据点;分成多段数据;计算目标点指向下一点的第一方位角,以及指向段尾站的第二方位角,计算角度偏差值;统计设定初始阈值;基于到站距离计算修正因子,修正因子与到站距离反相关且为正值;基于乘积计算筛选阈值,并剔除筛选阈值以上的部分目标数据点,得到方位角筛选数据;提取公交轨迹。本发明基于无监督聚类算法和方位角差异的筛选规则来聚合线路轨迹,降低异常点对轨迹分析的影响;还提出了基于到站距离反相关的修正算法,避免不同位置的筛选过于严格或过于松弛,最终提供了高精度和高可信度的轨迹数据。
技术研发人员:周彦彤,郁飞,孙虎,李曦,王茹
受保护的技术使用者:上海随申行智慧交通科技有限公司
技术研发日:
技术公布日:2024/12/19
- 还没有人留言评论。精彩留言会获得点赞!