一种生猪多目标跟踪方法及应用
本发明涉及生猪的多目标跟踪的,尤其涉及一种生猪多目标跟踪方法及其应用。
背景技术:
1、养猪业已成为我国畜牧业的支柱产业,猪只健康状况监测是养猪生产中的关键环节。利用多目标跟踪技术可以有效记录猪只的日常活动轨迹并检测其生理状态,有助于及早发现生猪异常并迅速采取干预措施,从而降低养殖企业的损失。传统的生猪养殖管理往往依赖于人工观察,不仅效率低,覆盖面窄,且难以发现猪只的细微变化和潜在问题。随着智能养殖技术的迅速发展,多目标跟踪技术逐渐应用于生猪养殖中,能够实现自动捕捉并分析猪只的运动轨迹、姿态变化和社交行为等多维度信息,为养殖者提供全面而精准的数据支持。
2、现有研究大多采用了tbd跟踪算法,虽然研究者们采取了多种不同的策略提升检测器和跟踪器的性能,但这些研究中的跟踪场景相对单一,并未充分反映出现实环境中可能遇到的各种复杂状况。
技术实现思路
1、本部分的目的在于概述本发明的实施例的一些方面以及简要介绍一些较佳实施例。在本部分以及本申请的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、鉴于上述现有存在的问题,提出了本发明。
3、因此,本发明解决的技术问题是:提供一种生猪多目标跟踪方法。
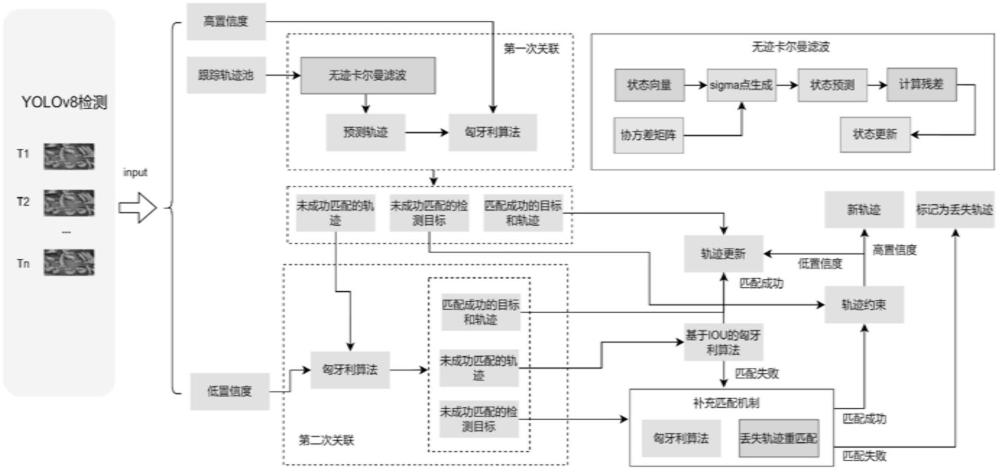
4、为解决上述技术问题,本发明提供如下技术方案:一种生猪多目标跟踪方法,包括以下步骤,构建采用定向边界框标注的多样化数据集;利用yolov8n模型进行生猪目标检测,输出每个目标的边界框坐标、宽高、置信度及类别;对输入的视频序列进行置信度分类,包括高置信度和低置信度;利用改进的无迹卡尔曼滤波器输出预测目标轨迹并与所述高置信度的目标进行一次关联匹配;匹配成功的目标和轨迹进行轨迹更新,对于未匹配成功的轨迹与所述低置信度的目标进行二次关联匹配,同时两次中均未成功匹配的检测目标和与之前记录中被视为遗失的轨迹利用补充匹配策略进行重新关联;所述补充匹配策略中匹配成功后形成新的轨迹,对于未匹配成功的轨迹标记为丢失轨迹,保持对生猪多目标的持续跟踪。
5、优选的,所述无迹卡尔曼滤波器的改进为对状态向量进行扩展,包括增加角度和角速度参数、以及增加残差函数处理角度变量。
6、优选的,所述无迹卡尔曼滤波器通过一组称为sigma点的样本近似状态向量的概率分布,并传播不确定性,sigma点的构造公式如下,
7、
8、式中,表示第i个sigma点,表示k时刻状态向量的均值估计,pk表示k时刻状态向量的协方差矩阵,反映了状态估计的不确定性,n是状态向量的维度,λ是一个调整参数。
9、优选的,所述增加角度和角速度参数包括,将卡尔曼滤波状态向量定义为式中,x、y表示对应的中心点坐标,a表示宽高比,h表示高度,和表示速度的x、y分量,和则分别表示宽高比和高度的变化率;增加旋转角度θ和角速度ω,并将重新定义为
10、优选的,所述增加残差函数处理角度变量包括引入了自定义残差函数,用于优化角度变量的处理方式,提高所述无迹卡尔曼滤波器在含有角度值状态向量的应用场景下的精确度和稳定性,角度值残差如下式:
11、y[i]=(a[i]-b[i]+π)%(2π)-π
12、式中,对于i个目标,首先计算角度差值,然后将该差值加π并取模2π,以确保结果在[0,2π]内,最后减去π将结果平移到[-π,π],保证残差角度的连续性和正确性。
13、优选的,所述无迹卡尔曼滤波器对轨迹的生成引入额外的约束,增加一个时间序列用于存储最近检测目标的数量,通过计算检测目标在一定帧数内的平均值来避免在部分帧内因误检所造成的id增长,如下式:
14、
15、式中,ad表示平均检测目标数,td表示从当前帧到之前第t帧内检测到的目标总数,tf表示从当前帧到之前第t帧的总帧数。
16、优选的,输入的视频帧数为每秒16帧,将tf设置为160,表示在过去的10秒内,只有当平均检测目标数ad大于当前准确跟踪的轨迹数。
17、优选的,所述yolov8n模型进行生猪目标检测,包括骨干网络、特征融合层和输出头;所述骨干网络负责特征提取,使用csp结构的darknet处理图像特征,逐步降低分辨率并增加特征图深度;所述特征融合层中通过panet实现特征融合并利用自下而上和自上而下的路径整合不同层次的特征,确保高低分辨率特征的有效结合;所述输出头基于融合后的特征图生成检测框和类别概率预测,输出每个目标的边界框坐标、宽高、置信度及类别。
18、本发明还提供了一种生猪多目标跟踪方法的应用,包括如上述的生猪多目标跟踪方法,应用于生猪的多目标跟踪。
19、优选的,在白天重度密集、白天极度密集、夜间重度密集和夜间极度密集四种复杂场景下,所述生猪多目标跟踪方法的高阶跟踪精度分别为96.10%、83.10%、76.50%和84.00%,idf1得分分别为95.7%、78.2%、70.1%和77.6%。
20、本发明的有益效果:在白天重度密集、白天极度密集、夜间重度密集和夜间极度密集四种复杂场景下,高阶跟踪精度分别为96.10%、83.10%、76.50%和84.00%,idf1得分分别为95.7%、78.2%、70.1%和77.6%,相较于bytetrack算法和ukftrack算法的hota分别提高了21、17.1、5.5和5.5个百分点,idf1分别提高了4.7、9.1、5.8和5.0个百分点。
技术特征:
1.一种生猪多目标跟踪方法,其特征在于:包括以下步骤,
2.根据权利要求1所述的生猪多目标跟踪方法,其特征在于:所述无迹卡尔曼滤波器的改进为对状态向量进行扩展,包括增加角度和角速度参数、以及增加残差函数处理角度变量。
3.根据权利要求2所述的生猪多目标跟踪方法,其特征在于:所述无迹卡尔曼滤波器通过一组称为sigma点的样本近似状态向量的概率分布,并传播不确定性,sigma点的构造公式如下,
4.根据权利要求2所述的生猪多目标跟踪方法,其特征在于:所述增加角度和角速度参数包括,
5.根据权利要求2所述的生猪多目标跟踪方法,其特征在于:所述增加残差函数处理角度变量包括,
6.根据权利要求1所述的生猪多目标跟踪方法,其特征在于:所述无迹卡尔曼滤波器对轨迹的生成引入额外的约束,增加一个时间序列用于存储最近检测目标的数量,通过计算检测目标在一定帧数内的平均值来避免在部分帧内因误检所造成的id增长,如下式:
7.根据权利要求6所述的生猪多目标跟踪方法,其特征在于:输入的视频帧数为每秒16帧,将tf设置为160,表示在过去的10秒内,只有当平均检测目标数ad大于当前准确跟踪的轨迹数。
8.根据权利要求1所述的生猪多目标跟踪方法,其特征在于:所述yolov8n模型进行生猪目标检测,包括骨干网络、特征融合层和输出头;
9.一种生猪多目标跟踪方法的应用,其特征在于:包括如权利要求1-8所述的生猪多目标跟踪方法,应用于生猪的多目标跟踪。
10.根据权利要求9所述的生猪多目标跟踪方法的应用,其特征在于:在白天重度密集、白天极度密集、夜间重度密集和夜间极度密集四种复杂场景下,所述生猪多目标跟踪方法的高阶跟踪精度分别为96.10%、83.10%、76.50%和84.00%,idf1得分分别为95.7%、78.2%、70.1%和77.6%。
技术总结
本发明公开了一种生猪多目标跟踪方法及应用,包括以下步骤,构建采用定向边界框标注的多样化数据集;利用YOLOv8n模型进行生猪目标检测;对输入的视频序列进行置信度分类;利用改进的无迹卡尔曼滤波器输出预测目标轨迹并与所述高置信度的目标进行一次关联匹配;对于未匹配成功的轨迹与所述低置信度的目标进行二次关联匹配,同时两次中均未成功匹配的检测目标和与之前记录中被视为遗失的轨迹利用补充匹配策略进行重新关联;所述补充匹配策略中匹配成功后形成新的轨迹。本发明的有益效果:在白天重度密集、白天极度密集、夜间重度密集和夜间极度密集四种复杂场景下,高阶跟踪精度分别为96.10%、83.10%、76.50%和84.00%,I DF1得分分别为95.7%、78.2%、70.1%和77.6%。
技术研发人员:徐爱俊,王亚彬,周素茵,叶俊华,赵阿勇
受保护的技术使用者:浙江农林大学
技术研发日:
技术公布日:2025/4/6
- 还没有人留言评论。精彩留言会获得点赞!