一种阿克曼率仿真方法、系统、设备及介质与流程
本申请涉及底盘设计,尤其涉及一种阿克曼率仿真方法、系统、设备及介质。
背景技术:
1、在轻型车底盘硬点的设计过程中,阿克曼率是一个重要性能参数指标,这个指标要求在合理的目标范围内,如果过底,虽高速过弯操稳能力较强,但会影响轮胎的纯滚动,导致轮胎偏磨现象;如果过高,则外轮转角会比内轮转角小的过多,过弯道时会导致不足转向,高速过弯时操稳性会变差,导致过弯能力变差。
2、由于阿克曼率和整车轮距、轴距关系密切,在车型平台在设计之初会同时规划多款不同轴距轮距的车型,这个时候尚且没有骡车可以进行k&c试验进行测量,只能通过对每个不同轴距轮距的数据模型逐一进行建模仿真得到,工作量比较繁重。
3、以前麦弗逊悬架,后钢板弹簧带后轴总成的车型为例,如果平台规划涉及不同轴距、轮距,现有的方案只能对不同的轮距&轴距车辆的阿克曼率进行硬点仿真并逐一求解,如不合适,则需要重新更改硬点设计,再次对每个车型逐一进行仿真模型搭建分析阿克曼率是否在推荐的标准范围内,如此往复,直至合格为止,费时费力。
技术实现思路
1、本申请提供了一种阿克曼率仿真方法、系统、设备及介质,用以解决上述问题。
2、一方面,本申请提供了一种阿克曼率仿真方法,所述方法包括以下步骤:
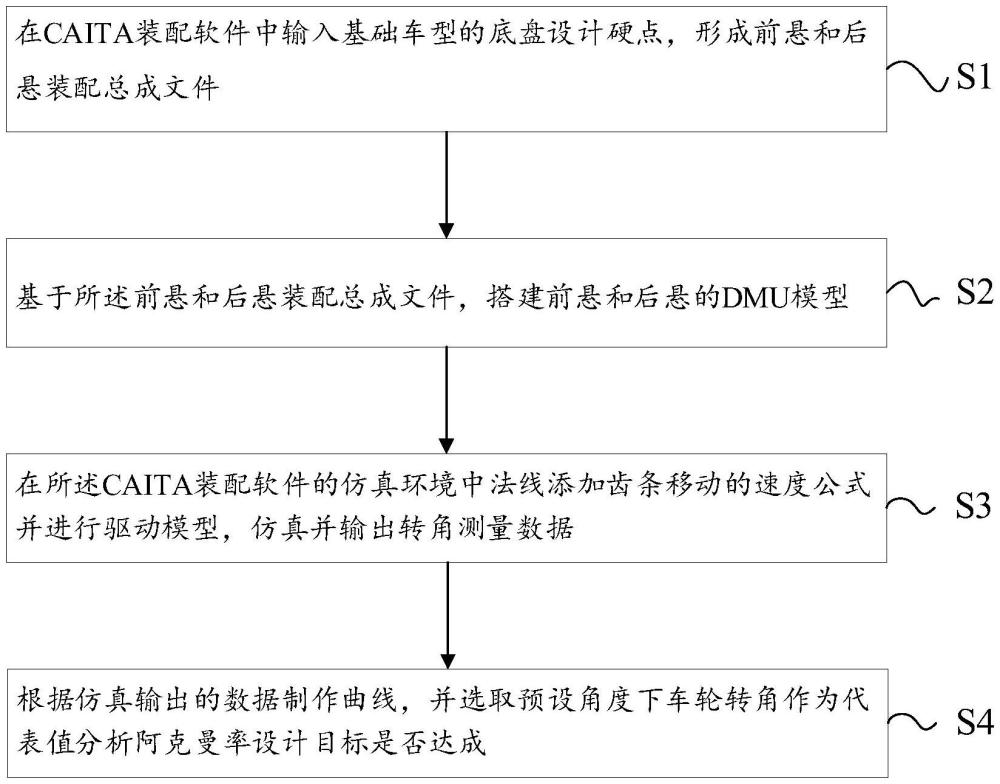
3、步骤s1:在caita装配软件中输入基础车型的底盘设计硬点,形成前悬和后悬装配总成文件;
4、步骤s2:基于所述前悬和后悬装配总成文件,搭建前悬和后悬的dmu模型;
5、步骤s3:在所述caita装配软件的仿真环境中法线添加齿条移动的速度公式并进行驱动模型,仿真并输出转角测量数据;
6、步骤s4:根据仿真输出的数据制作曲线,并选取预设角度下车轮转角作为代表值分析阿克曼率设计目标是否达成。
7、在本申请的一种实现方式中,在所述步骤s3之前,所述方法还包括:
8、在所述caita装配软件中添加辅助零部件对理论转角的测量;
9、进行纯滚动工况时理论转角的求解。
10、在本申请的一种实现方式中,所述步骤s4之后,所述方法还包括:
11、对输出的仿真数据及制作的曲线进行分析;
12、判断每个变化的轴距及轮距下车辆硬点是否合格,如果阿克曼率超出预设阈值,则调整轴距轮距及硬点数据重复步骤s1-s4。
13、在本申请的一种实现方式中,理论转角的求解,具体是:以左前轮为基准,当车辆右转弯时,当左前轮转过一定角度,计算右前轮正好实现纯滚时转过的角度。
14、在本申请的一种实现方式中,角度计算具体通过添加公式建立函数关系实现。
15、在本申请的一种实现方式中,添加的公式具体为:理论转角φ=atan(1/(1/tan(`测量间距.3\角度`+0.001deg)-(p+`机械装置.1\命令\左前轮距\长度`/1mm)/(l+`机械装置.1\命令\轴距\长度`/1mm)));其中l为轴距,p为主销距。
16、在本申请的一种实现方式中,所述步骤s2,具体为:
17、对dmu模型中的3d零部件数据进行分组,按照固定部分、可移动部分进行划分;
18、进入所述caita装配软件的仿真环境,对零部件施加约束。形成前悬和后悬的dmu模型。
19、本申请还提供了一种阿克曼率仿真系统,所述系统包括:
20、硬点数据输入单元,用于在caita装配软件中输入基础车型的底盘设计硬点,形成前悬和后悬装配总成文件;
21、dmu模型搭建单元,用于基于所述前悬和后悬装配总成文件,搭建前悬和后悬的dmu模型;
22、驱动仿真单元,用于在所述caita装配软件的仿真环境中法线添加齿条移动的速度公式并进行驱动模型,仿真并输出转角测量数据;
23、阿克曼率分析单元,用于根据仿真输出的数据制作曲线,并选取预设角度下车轮转角作为代表值分析阿克曼率设计目标是否达成。
24、本申请还提供了一种阿克曼率仿真设备,所述设备包括:
25、至少一个处理器;以及,
26、与所述至少一个处理器通信连接的存储器;其中,
27、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够完成前述的一种阿克曼率仿真方法。
28、本申请还提供了一种阿克曼率仿真的非易失性计算机存储介质,存储有计算机可执行指令,所述计算机可执行指令被处理器执行以用于实现前述的一种阿克曼率仿真方法。
29、本申请提供的一种阿克曼率仿真方法、系统、设备及介质,可代替以前对单一车型轴距和轮距传统的阿克曼率仿真分析方法,尤其是针对四分之一悬架硬点不变进行平移的轴距和轮距变化的车型,避免对每个不同轴距和轮距的车型进行逐一分析求解的重复性劳动。本专利涉及到一个通用模型的搭建,只要对该通用模型进行固定件和运动件进行拆分,并对轴距轮距的参数添加约束副,就可以实现变轴距变轮距的更改,从而进行阿克曼率分析仿真,提高分析效率。
技术特征:
1.一种阿克曼率仿真方法,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的一种阿克曼率仿真方法,其特征在于,在所述步骤s3之前,所述方法还包括:
3.根据权利要求1所述的一种阿克曼率仿真方法,其特征在于,所述步骤s4之后,所述方法还包括:
4.根据权利要求2所述的一种阿克曼率仿真方法,其特征在于,理论转角的求解,具体是:以左前轮为基准,当车辆右转弯时,当左前轮转过一定角度,计算右前轮正好实现纯滚时转过的角度。
5.根据权利要求4所述的一种阿克曼率仿真方法,其特征在于,角度计算具体通过添加公式建立函数关系实现。
6.根据权利要求5所述的一种阿克曼率仿真方法,其特征在于,添加的公式具体为:理论转角φ=atan(1/(1/tan(`测量间距.3\角度`+0.001deg)-(p+`机械装置.1\命令\左前轮距\长度`/1mm)/(l+`机械装置.1\命令\轴距\长度`/1mm)));其中l为轴距,p为主销距。
7.根据权利要求1所述的一种阿克曼率仿真方法,其特征在于,所述步骤s2,具体为:
8.一种阿克曼率仿真系统,其特征在于,所述系统包括:
9.一种阿克曼率仿真设备,其特征在于,所述设备包括:
10.一种阿克曼率仿真的非易失性计算机存储介质,存储有计算机可执行指令,其特征在于,所述计算机可执行指令被处理器执行以用于实现权利要求1-7任意一项所述的一种阿克曼率仿真方法。
技术总结
本申请公开了一种阿克曼率仿真方法、系统、设备及介质,利用CATIA软件仿真模块搭建一种可变轴距及轮距的模型,通过辅助零件的添加及约束副设置,模拟出在可变轴距及轮距的情况下车辆的阿克曼率值,并判断是否在标准范围内,来评估前期整车的关键参数及硬点是否合理。这种技术克服了以往每次仅能通过一种固定的轴距及轮距来仿真车辆阿克曼率的缺点,如要变化轴距、轮距需要多次搭建模型,每变化一个参数就需要重新搭建一次,反复做重复性工作,填补了平台车型变轴距及轮距仿真模型搭建的空白,通过该模型可以快速分析不同轴距轮距车辆阿克曼率值的合理性,大幅提升了底盘平台前期的硬点设计效率。
技术研发人员:赵金龙,陶德芝,郑福玉
受保护的技术使用者:中国重汽集团济南动力有限公司
技术研发日:
技术公布日:2025/2/27
- 还没有人留言评论。精彩留言会获得点赞!