一种轨道扣件智能巡检方法及智能巡检小车与流程
本发明属于轨道巡检,具体涉及一种轨道扣件智能巡检方法及智能巡检小车。
背景技术:
1、轨道检测是保障铁路安全、提高运输效率的重要手段。通过对轨道进行定期检测,可以及时发现轨道的缺陷和隐患,采取有效的维修措施,确保铁路运输的顺利进行。
2、轨道扣件是轨道的重要配件,通常利用轨道智能巡检小车对轨道及其配件进行巡检,轨道智能巡检小车(以下简称“巡检车”)能够实现轨道缺陷和病害的检测识别、查找定位、质量评定评价、趋势预测监控,通过实时检测、综合分析、数据挖掘,找出各专业检测数据之间的关联性,掌握轨道病害发展规律、状态变化趋势,具有综合、高效、实时等特点,减少成本投入,大幅度的提升检测效率,减少人员上道作业频次,实现指导轨道维护养护,延长轨道设施使用寿命和确保运营安全。
3、目前市面上大多使用手推式轨道扣件安装状态检查仪对轨道扣件进行检测,该方式不便于人员长时间作业,疲劳强度过大,且自动化、数字化、智能化程度不足,仅仅停留在人工操作阶段,不利于解放劳动力和大力推广。
4、当前,随着我国高速铁路和城市轨道交通的快速发展,其安全问题也变得日益重要,而我国在轨道交通安全检测和保障方面的技术较为传统,许多方面仍然依靠人工巡检,在轨道交通行业快速发展的今天,机械化和自动化的轨道交通安全检测技术日益成为焦点。
技术实现思路
1、鉴于现有技术中存在上述问题,本发明的目的是提供一种轨道扣件智能巡检方法,通过采集扣件信息实现对扣件外形、螺母高度进行检测判断,并结合标杆信息对扣件进行定位,确定扣件的准确位置。
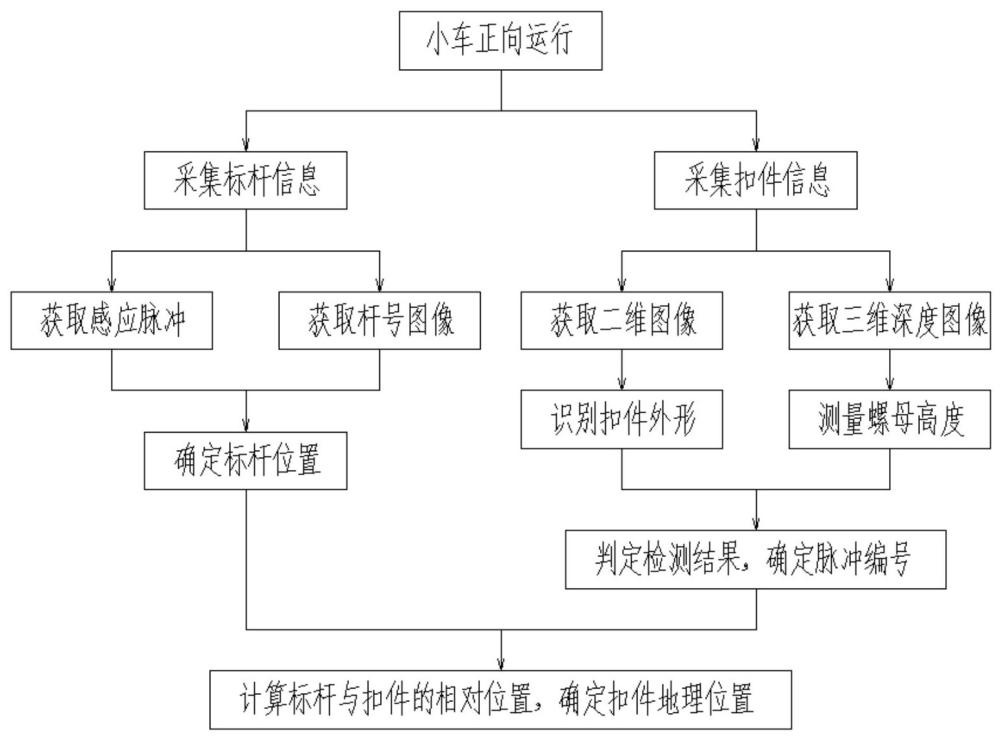
2、一种轨道扣件智能巡检方法,用于对轨道扣件进行巡检,并根据轨道旁侧设置的标杆确定对应轨道扣件的地理位置,具体包括如下步骤:
3、采集信息:获取当前标杆的感应脉冲、标杆的图片以及轨道扣件二维图像、三维深度图像;
4、标杆信息处理:根据采集的信息获取标杆的感应脉冲计数和标杆的杆号字符以确定标杆的地理位置;
5、扣件信息处理:根据轨道扣件二维图像和轨道扣件三维深度图像得到轨道扣件的检测结果以及位置信息,所述位置信息包括扣件的图像坐标和脉冲编号;
6、定位扣件:根据标杆的地理位置和轨道扣件的脉冲编号计算标杆与轨道扣件的相对位置,从而推定轨道扣件的地理位置;
7、根据轨道扣件二维图像和三维深度图像对轨道扣件进行检测,判断轨道扣件是否合格,若不合格则报警并输出对应轨道扣件的地理位置,若合格则巡检小车继续前行完成检测。
8、优选的,通过标杆相机连续拍照获取当前标杆的图片,通过脉冲接收器接收标杆上传感器发射的感应脉冲并计数,所述标杆上的传感器为光电开关;每个标杆配置有对应的唯一杆号,对标杆图片进行图像识别以获取杆号字符;通过杆号字符和感应脉冲计数推定当前标杆的地理位置。
9、优选的,通过扣件相机获取当前扣件的二维图像,此外,扣件相机拍摄轨道扣件二维图像时,轨道扣件的脉冲编号依次累加;通过构建的结构光系统获取当前扣件的三维深度图像;所述轨道扣件包括左扣件和右扣件,对当前扣件的二维图像进行图像处理以实现扣件分类、轮廓提取,从而判断当前扣件是否合格;通过结构光系统获取当前扣件的螺母高度和空间位置,根据螺母高度判断当前扣件是否合格,根据当前扣件的空间位置确定对应的图像坐标。
10、优选的,所述结构光系统包括结构光投射器和系统相机,设置系统相机与结构光投射器呈设置的角度安装,结构光投射器向物体表面发射线结构光,使线结构光平面与物体表面相切,在物体表面形成一条光条。
11、优选的,所述扣件不合格情况包括左扣件和右扣件的位置装反、扣件破损、螺母未安装、螺母高度不处于阈值范围。
12、本发明的另一个目的在于,提出一种轨道扣件智能巡检小车,一种轨道扣件智能巡检小车,包括:
13、标杆检测模块,用于获取标杆输出的感应脉冲并计数、获取标杆图片并对标杆图片进行图像识别以获取杆号字符,通过杆号字符和感应脉冲计数推定当前标杆的地理位置;
14、扣件检测模块,用于获取轨道扣件的二维图像并对当前扣件的二维图像进行图像处理以实现扣件分类、轮廓提取;同时,设置扣件相机拍摄轨道扣件二维图像时,轨道扣件的脉冲编号依次累加;获取轨道扣件的三维深度图像从而获取当前扣件的螺母高度和空间位置,所述空间位置反映当前扣件的图像坐标;
15、中控模块,用于根据轨道扣件的二维图像和三维深度图像的处理结果判断当前扣件是否存在不合格情况;根据标杆的地理位置和轨道扣件的脉冲编号计算标杆与轨道扣件的相对位置,从而推定轨道扣件的地理位置;
16、当检测到轨道扣件存在不合格情况时,中控模块驱动报警模块发出警报并输出对应轨道扣件的地理位置。
17、优选的,所述巡检小车还包括驱动模块和供电模块,所述驱动模块用于驱动小车沿轨道运行从而依次检修轨道扣件,驱动模块与底盘通过插销定位和肘夹机构锁紧;所述供电模块用于向巡检小车提供相应的供电电源,通过外形限位垂直朝下放置于底盘上。
18、优选的,标杆检测模块包括标杆相机和脉冲接收器,标杆相机用于获取标杆图片,所述标杆上安装有用于输出感应脉冲的光电开关;扣件检测模块包括扣件相机和结构光系统,所述扣件相机用于获取轨道扣件的二维图像,结构光系统用于获取轨道扣件的三维图像,所述结构光系统包括结构光投射器和系统相机,设置系统相机与结构光投射器呈设置的角度安装,结构光投射器向物体表面发射线结构光,使线结构光平面与物体表面相切,在物体表面形成一条光条。
19、优选的,扣件不合格情况包括左扣件和右扣件的位置装反、扣件破损、螺母未安装、螺母高度不处于阈值范围。
20、本发明的有益效果是:该轨道扣件智能巡检方法,通过采集轨道扣件的信息,利用图像识别技术对轨道扣件的二维图像进行识别分析,判断轨道扣件是否存在安装反向、外形破损等问题;同时,利用构建的结构光系统采集轨道扣件的三维深度图像,测量扣件上的螺母是否存在丢失或松动等问题,实现轨道扣件的智能巡检,提高检测效率。
21、进一步的,结合标杆信息对扣件定位,通过采集标杆的感应脉冲和杆号字符确定当前标杆的位置,通过计算当前标杆与当前轨道扣件之间的相对位置,从而确定轨道扣件的准确位置,便于扣件定位。
22、该轨道扣件智能巡检小车通过轻量化集成设计,将标杆检测模块、扣件检测模块和中控模块相结合,利用二维图像和三维深度图像的融合,通过二维图像实现目标识别,通过三维图像实现精确测量;结合标杆检测模块对当前轨道扣件进行位置定位,能够有效消除小车行程的累积误差,实现扣件、接口等配件的精准定位。
技术特征:
1.一种轨道扣件智能巡检方法,其特征在于,用于对轨道扣件进行巡检,并根据轨道旁侧设置的标杆确定对应轨道扣件的地理位置,具体包括如下步骤:
2.根据权利要求1所述的轨道扣件智能巡检方法,其特征在于,通过标杆相机连续拍照获取当前标杆的图片,通过脉冲接收器接收标杆上传感器发射的感应脉冲并计数,所述标杆上的传感器为光电开关;
3.根据权利要求1所述的轨道扣件智能巡检方法,其特征在于,通过扣件相机获取当前扣件的二维图像,此外,扣件相机拍摄轨道扣件二维图像时,轨道扣件的脉冲编号依次累加;通过构建的结构光系统获取当前扣件的三维深度图像;
4.根据权利要求3所述的轨道扣件智能巡检方法,其特征在于,所述结构光系统包括结构光投射器和系统相机,设置系统相机与结构光投射器呈设置的角度安装,结构光投射器向物体表面发射线结构光,使线结构光平面与物体表面相切,在物体表面形成一条光条。
5.根据权利要求1所述的轨道扣件智能巡检方法,其特征在于,所述轨道扣件的不合格情况包括左扣件和右扣件的位置装反、扣件破损、螺母未安装、螺母高度不处于阈值范围。
6.一种轨道扣件智能巡检小车,其特征在于,包括:
7.根据权利要求6所述的轨道扣件智能巡检小车,其特征在于,所述巡检小车还包括驱动模块和供电模块,所述驱动模块用于驱动小车沿轨道运行从而依次检修轨道扣件,驱动模块与底盘通过插销定位和肘夹机构锁紧;所述供电模块用于向巡检小车提供相应的供电电源,通过外形限位垂直朝下放置于底盘上。
8.根据权利要求6所述的轨道扣件智能巡检小车,其特征在于,所述标杆检测模块包括标杆相机和脉冲接收器,所述标杆相机用于获取标杆图片,所述标杆上安装有用于输出感应脉冲的光电开关;
9.根据权利要求6所述的轨道扣件智能巡检小车,其特征在于,所述轨道扣件的不合格情况包括左扣件和右扣件的位置装反、扣件破损、螺母未安装、螺母高度不处于阈值范围。
技术总结
本发明提供一种轨道扣件智能巡检方法及智能巡检小车,应用于轨道巡检技术领域,包括如下步骤:获取标杆的感应脉冲、标杆图片以及轨道扣件二维图像、三维深度图像;根据标杆的感应脉冲计数和杆号字符确定标杆的地理位置;根据轨道扣件二维图像和轨道扣件三维深度图像得到轨道扣件的检测结果以及位置信息,位置信息包括扣件的图像坐标和脉冲编号;根据标杆的地理位置和轨道扣件的脉冲编号计算标杆与轨道扣件的相对位置推定轨道扣件的地理位置;判断轨道扣件是否合格,若不合格则报警并输出对应轨道扣件的地理位置;通过采集扣件信息实现对扣件外形、螺母高度进行检测判断,并结合标杆信息对扣件进行定位,确定扣件的准确位置。
技术研发人员:杨文静,徐峥,高文超
受保护的技术使用者:苏州振畅智能科技有限公司
技术研发日:
技术公布日:2024/12/23
- 还没有人留言评论。精彩留言会获得点赞!