一种自动清车机器人悬臂结构优化设计方法与流程
本发明涉及信息,尤其涉及一种自动清车机器人悬臂结构优化设计方法。
背景技术:
1、问题背景:
2、针对自动清车机器人技术在翻车机空车余煤清扫中的应用,存在一个关键的技术问题:如何设计一种标准化的悬臂接口和模块,使得不同型号的清车机器人能够共用悬臂部件,并实现快速、便捷的悬臂存取。这一问题的解决对于降低自动清车机器人的制造成本和维护难度具有重要意义。
3、目前,不同型号的清车机器人通常采用不同的悬臂设计,导致零部件无法通用,增加了生产和维护成本。此外,更换或维修悬臂时,往往需要较长的设备停机时间,影响清扫效率。因此,亟需研究设计一种标准化的悬臂接口和模块,使其能够在不同型号的清车机器人上实现互换,同时采用快速锁紧装置,实现悬臂的快速安装和拆卸,最大限度地减少设备停机时间。
4、这一技术问题的解决需要在深入分析翻车机空车余煤清扫工艺和自动清车机器人运行特点的基础上,综合考虑悬臂的力学性能、材料选择、接口标准化设计、快速锁紧装置设计等多方面因素,并进行反复的试验验证和优化改进,以期获得一种兼顾通用性、可靠性和高效性的悬臂标准化解决方案,从而推动自动清车机器人技术在翻车机空车余煤清扫领域的广泛应用。
技术实现思路
1、本发明提供了一种自动清车机器人悬臂结构优化设计方法,主要包括:
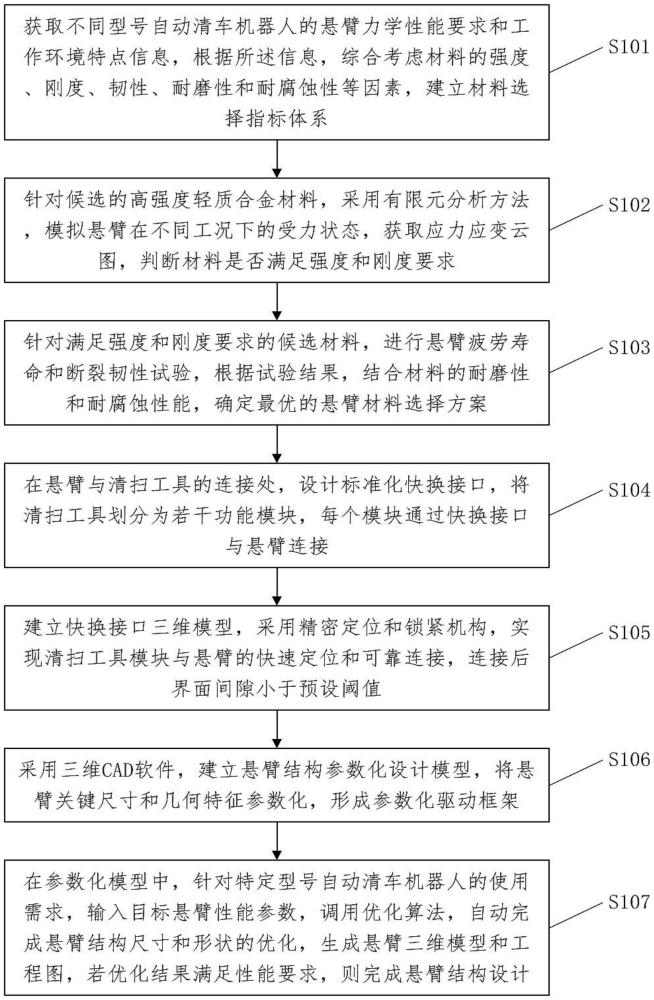
2、获取不同型号自动清车机器人的悬臂力学性能要求和工作环境特点信息,根据所述信息,综合考虑材料的强度、刚度、韧性、耐磨性和耐腐蚀性等因素,建立材料选择指标体系;
3、针对候选的高强度轻质合金材料,采用有限元分析方法,模拟悬臂在不同工况下的受力状态,获取应力应变云图,判断材料是否满足强度和刚度要求;
4、针对满足强度和刚度要求的候选材料,进行悬臂疲劳寿命和断裂韧性试验,根据试验结果,结合材料的耐磨性和耐腐蚀性能,确定最优的悬臂材料选择方案;
5、在悬臂与清扫工具的连接处,设计标准化快换接口,将清扫工具划分为若干功能模块,每个模块通过快换接口与悬臂连接;
6、建立快换接口三维模型,采用精密定位和锁紧机构,实现清扫工具模块与悬臂的快速定位和可靠连接,连接后界面间隙小于预设阈值;
7、采用三维cad软件,建立悬臂结构参数化设计模型,将悬臂关键尺寸和几何特征参数化,形成参数化驱动框架;
8、在参数化模型中,针对特定型号自动清车机器人的使用需求,输入目标悬臂性能参数,调用优化算法,自动完成悬臂结构尺寸和形状的优化,生成悬臂三维模型和工程图,若优化结果满足性能要求,则完成悬臂结构设计。
9、本发明实施例提供的技术方案可以包括以下有益效果:
10、本发明公开了一种自动清车机器人悬臂结构优化设计方法。该方法首先建立材料选择指标体系,综合考虑强度、刚度、韧性等因素,通过有限元分析和疲劳试验筛选最优悬臂材料。然后设计标准化快换接口,实现清扫工具模块化连接。最后建立悬臂结构参数化设计模型,针对特定型号机器人需求,输入目标性能参数,调用优化算法自动完成结构优化。本发明通过材料优选、模块化设计和参数化优化相结合的方法,实现了自动清车机器人悬臂的高效定制化设计,提高了悬臂结构的性能和适应性,为不同工况下的清车作业提供了可靠的技术支持。
技术特征:
1.一种自动清车机器人悬臂结构优化设计方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述获取不同型号自动清车机器人的悬臂力学性能要求和工作环境特点信息,根据所述信息,综合考虑材料的强度、刚度、韧性、耐磨性和耐腐蚀性等因素,建立材料选择指标体系,包括:
3.根据权利要求1所述的方法,其特征在于,所述针对候选的高强度轻质合金材料,采用有限元分析方法,模拟悬臂在不同工况下的受力状态,获取应力应变云图,判断材料是否满足强度和刚度要求,包括:
4.根据权利要求1所述的方法,其特征在于,所述针对满足强度和刚度要求的候选材料,进行悬臂疲劳寿命和断裂韧性试验,根据试验结果,结合材料的耐磨性和耐腐蚀性能,确定最优的悬臂材料选择方案,包括:
5.根据权利要求1所述的方法,其特征在于,所述在悬臂与清扫工具的连接处,设计标准化快换接口,将清扫工具划分为若干功能模块,每个模块通过快换接口与悬臂连接,包括:
6.根据权利要求1所述的方法,其特征在于,所述建立快换接口三维模型,采用精密定位和锁紧机构,实现清扫工具模块与悬臂的快速定位和可靠连接,连接后界面间隙小于预设阈值,包括:
7.根据权利要求1所述的方法,其特征在于,所述采用三维cad软件,建立悬臂结构参数化设计模型,将悬臂关键尺寸和几何特征参数化,形成参数化驱动框架,包括:
8.根据权利要求1所述的方法,其特征在于,所述在参数化模型中,针对特定型号自动清车机器人的使用需求,输入目标悬臂性能参数,调用优化算法,自动完成悬臂结构尺寸和形状的优化,生成悬臂三维模型和工程图,若优化结果满足性能要求,则完成悬臂结构设计,包括:
技术总结
本申请提供一种自动清车机器人悬臂结构优化设计方法,包括:针对候选的高强度轻质合金材料,采用有限元分析方法,模拟悬臂在不同工况下的受力状态,获取应力应变云图,判断材料是否满足强度和刚度要求;在悬臂与清扫工具的连接处,设计标准化快换接口,将清扫工具划分为若干功能模块,每个模块通过快换接口与悬臂连接;建立快换接口三维模型,采用精密定位和锁紧机构,实现清扫工具模块与悬臂的快速定位和可靠连接,连接后界面间隙小于预设阈值;采用三维CAD软件,建立悬臂结构参数化设计模型,将悬臂关键尺寸和几何特征参数化,形成参数化驱动框架。
技术研发人员:朱致远
受保护的技术使用者:湖北华电襄阳发电有限公司
技术研发日:
技术公布日:2025/4/6
- 还没有人留言评论。精彩留言会获得点赞!