一种自动甄别高速公路货车占用快车道方法与流程
本发明涉及智能交通控制,具体为一种自动甄别高速公路货车占用快车道方法。
背景技术:
1、高速公路作为现代交通体系的重要组成部分,其通行效率与安全性至关重要。然而,货车违规占用快车道现象时有发生,不仅影响其他车辆的正常行驶,还可能导致交通事故的发生。现有的管理方法大多是通过管理人员驾驶巡逻车巡逻管辖路段的方式,以及配合基于监控视频远程人工巡查的方式进行治理。但是现有的人工监控方式存在效率低、易遗漏等问题,难以满足当前交通管理的需求。
技术实现思路
1、为了解决人工甄别高速公路货车占用快车道效率低的问题,本发明提供一种自动甄别高速公路货车占用快车道方法,其可以自动甄别高速公路货车占用快车道,有效地提高了发现问题的效率。
2、本发明的技术方案是这样的:一种自动甄别高速公路货车占用快车道方法,其特征在于,其包括以下步骤:
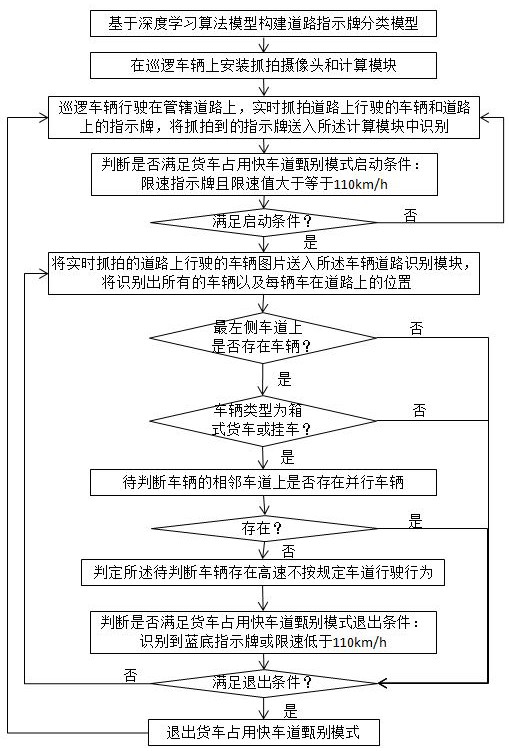
3、s1: 基于深度学习算法模型构建道路指示牌分类模型,对道路上安装的指示牌类型进行分类;
4、所述指示牌类型包括:绿底指示牌、蓝底指示牌和限速指示牌;
5、所述绿底指示牌,代表高速或快速路;所述蓝底指示牌,通常代表普通公路或城市道路;所述限速指示牌为高速或者快速路上的限速标志;
6、s2:在巡逻车辆上安装抓拍摄像头和计算模块;
7、所述计算模块中包括训练好的所述道路指示牌分类模型、限速值识别模块和车辆道路识别模块;
8、当所述道路指示牌分类模型输出指示牌类型为所述限速指示牌时,基于所述限速值识别模块识别出所述限速指示牌上对应的具体限速值;
9、s3:所述巡逻车辆行驶在管辖道路上,实时抓拍道路上行驶的车辆和道路上的指示牌;
10、s4:将抓拍到的指示牌送入所述计算模块中识别;
11、当所述计算模块输出的指示牌类型为:限速指示牌,同时识别出的限速值大于等于110km/h时,执行步骤s5,启动货车占用快车道甄别模式;
12、否则,循环执行步骤s3~s4;
13、s5:将实时抓拍的道路上行驶的车辆图片送入所述车辆道路识别模块,将识别出所有的车辆以及每辆车在道路上的位置;
14、s6:判断最左侧车道上是否存在车辆;
15、如果有,则执行步骤s7;
16、如果没有,则训执行步骤s3~s4;
17、s7:将位于最左侧车道的车辆记作:待判断车辆;
18、基于所述待判断车辆的车牌号码判断车辆类型;
19、如果所述车辆类型为箱式货车或挂车,则执行步骤s8;
20、否则,循环执行步骤s3~s4;
21、s8:确认所述待判断车辆的相邻车道上是否存在并行车辆;
22、如果存在,则循环执行步骤s3~s4;
23、如果不存在,则判定所述待判断车辆存在高速不按规定车道行驶行为,记作:违规嫌疑车辆。
24、其进一步特征在于:
25、步骤s1中,基于pytorch深度学习框架构建所述道路指示牌分类模型;
26、其还包括以下步骤:
27、s9:自动记录一段不少于5秒的所述违规嫌疑车辆占用快车道的监控视频;
28、所述货车占用快车道甄别模式的退出条件为:
29、当所述巡逻车辆抓的计算模块识别到蓝底指示牌或限速低于110km/h时,自动退出所述货车占用快车道甄别模式;
30、步骤s7中,还包括以下步骤:
31、当识别出的车辆号牌在本日内已经被判定过所述违规嫌疑车辆,则对同一辆车同一日不再次进行判定;
32、所述限速指示牌对应的限速值包括:80km/h、90km/h、100km/h、110km/h和120km/h。
33、本申请提供的一种自动甄别高速公路货车占用快车道方法,其通过深度学习模型精确识别道路指示牌、限速标志及车辆类型,有效排除堵车、变道等特殊情形下的误判,提高甄别准确率。本申请可以自动记录违规车辆信息,减少人工干预,大幅提高交通管理效率。
技术特征:
1.一种自动甄别高速公路货车占用快车道方法,其特征在于,其包括以下步骤:
2.根据权利要求1所述一种自动甄别高速公路货车占用快车道方法,其特征在于:步骤s1中,基于pytorch深度学习框架构建所述道路指示牌分类模型。
3.根据权利要求1所述一种自动甄别高速公路货车占用快车道方法,其特征在于:其还包括以下步骤:
4.根据权利要求1所述一种自动甄别高速公路货车占用快车道方法,其特征在于:所述货车占用快车道甄别模式的退出条件为:
5.根据权利要求1所述一种自动甄别高速公路货车占用快车道方法,其特征在于:步骤s7中,还包括以下步骤:
6.根据权利要求1所述一种自动甄别高速公路货车占用快车道方法,其特征在于:所述限速指示牌对应的限速值包括:80km/h、90km/h、100km/h、110km/h和120km/h。
技术总结
本申请提供的一种自动甄别高速公路货车占用快车道方法,其通过深度学习模型精确识别道路指示牌、限速标志及车辆类型,有效排除堵车、变道等特殊情形下的误判,提高甄别准确率。本申请可以自动记录违规车辆信息,减少人工干预,大幅提高交通管理效率。
技术研发人员:尤勇,何瑞华,镇煌,黎厚冰,陆俊杰
受保护的技术使用者:公安部交通管理科学研究所
技术研发日:
技术公布日:2025/3/27
- 还没有人留言评论。精彩留言会获得点赞!