一种车载点云的机动车道与人行道分割方法
本发明涉及点云处理,尤其涉及一种车载点云的机动车道与人行道分割方法。
背景技术:
1、机动车道与人行道的精准分割在城市交通管理、智能驾驶和道路规划中具有重要意义;传统的机动车道与人行道分割方法通常依赖于人工标注或基于图像的检测技术;
2、公开号为cn117745793a的专利,采用基于fgn的小样本实例分割模型,对所述待测量图片进行检测和划分,生成多个mask矩阵,每个mask矩阵标识一个慢行道路区域以及区域类型;其中,所述基于fgn的小样本实例分割模型为使用coco数据集和ss数据集通过机器学习训练得到;该方法不仅耗时费力,还需要构建网络模型,容易受到光照条件、天气变化和遮挡物等因素的影响,导致分割结果的准确性和鲁棒性不足。
3、利用车载点云数据进行的研究,已广泛应用于道路标线提取、障碍物检测和建筑物三维建模等领域;但用于机动车道与人行道的自动分割研究仍较少,多集中于具有明显高度的路缘石的简单道路场景的分割方法,这些方法难以分割机动车道和人行道高度类似或缓慢变化的情况,对复杂道路场景的适应性较差。
技术实现思路
1、针对现有方法的不足,本发明充分利用点云数据的空间特征和渐变有界特征,实现对机动车道与人行道的高效分割。
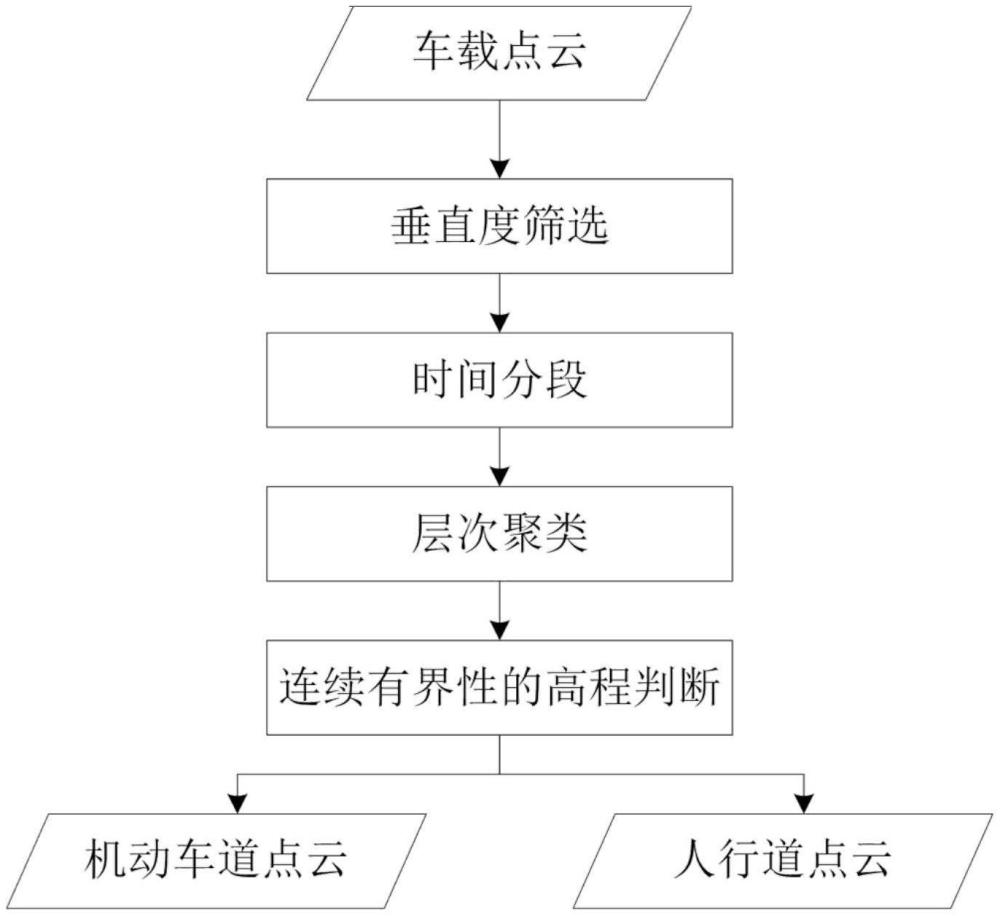
2、本发明所采用的技术方案是:一种车载点云的机动车道与人行道分割方法包括以下步骤:
3、步骤一、采集道路点云数据;
4、步骤二、通过计算点云的法向量和垂直度,保留垂直度在预设垂直度阈值范围内的点云,得到平坦区域点云;
5、作为本发明的一种优选实施方式,步骤二具体包括:
6、步骤21、检测点云中的第p个点,如果点p未处理,则初始化点p的垂直度;
7、步骤22、以点p中心,获取该点的球形邻域半径内的点云,作为该点的邻域点集pp;
8、步骤23、对pp进行pca分析,得到空间坐标系上的三个坐标轴的特征值和特征向量;将pp中的最小的特征值对应的特征向量作为点p的法向量np;
9、步骤24、计算点p的垂直度:vp=1-|nzp|,|*|代表绝对值,np的z轴法向量;
10、步骤25、计算所有点的垂直度;
11、步骤26、保留垂直度范围在预设垂直度阈值内的点,作为平坦区域点云。
12、步骤三、利用时间索引属性,将平坦区域点云进行等时间间隔分段;
13、步骤四、利用层次聚类对每段点云分别进行聚类分块,保留点数量最多的聚类簇点云为地面点云;
14、作为本发明的一种优选实施方式,步骤四具体包括:
15、步骤41、对每段点云中的若干点初始化为若干独立簇;
16、步骤42、计算任意两个点之间的距离,构建每段点云的距离矩阵d;
17、作为本发明的一种优选实施方式,使用欧式距离计算任意两个点之间的距离。
18、步骤43、根据所有簇之间的最小距离与设定距离阈值进行比较,进行簇合并;
19、作为本发明的一种优选实施方式,步骤43具体包括:
20、当所有簇之间的最小距离小于设定距离阈值,将距离最近的两个簇合并为一个新的簇,并更新簇的数量;
21、当所有簇之间的最小距离不小于设定距离阈值停止聚类。
22、步骤44、重新计算新簇与其他簇之间的距离;
23、步骤45、直到所有簇之间的最小距离不小于设定距离阈值时停止;
24、步骤46、保留点数量最多的聚类簇为地面点云。
25、步骤五、对每段地面点云分别进行分块,利用连续有界性的高程判断准则,获取机动车道和人行道的边界点云;
26、作为本发明的一种优选实施方式,步骤五具体包括:
27、步骤51、沿x轴对地面点云分块;
28、作为本发明的一种优选实施方式,分块是按照固定格网尺寸。
29、步骤52、计算每块点云的点数,选择点数最多的块为中心块;
30、步骤53、计算每个块内的点云的高程平均值,作为每个块的代表值;
31、步骤54、设置中心块、及其左、右外侧块值;
32、步骤55、将中心块和左、右外侧块值进行比较,进行边界点云识别。
33、作为本发明的一种优选实施方式,步骤55具体包括:
34、如果中心块值vg0最大,表示该段地面点云为机动车道,不存在人行道,不做处理;
35、如果左外侧块值vglmax最大,则代表左外侧块存在人行道,右外侧块为机动车道,继续处理左外侧块;
36、如果右外侧块vgrmax最大,则代表右外侧块存在人行道,左外侧块为机动车道,继续处理右外侧块;从中心块出发,依次遍历右外侧块;判断当前块是否满足如下条件:
37、vgrmax-vcurrent>vt且vgc-rmax>vcurrent
38、其中,vt为预设定高差阈值;vcurrent为当前块的值;vgrmax为中心块的右侧块的最大值;vgc-rmax为当前块的外侧块的值;
39、满足条件时当前块为边界块,停止处理;若不满足,继续判断更外侧的块;若没有满足条件的块,则该段地面点云均为机动车道点云,无人行道点云。
40、步骤六、利用边界点云分割地面点云,根据点云数进行人行道和机动车道划分;
41、作为本发明的一种优选实施方式,步骤六具体包括:
42、步骤61、若地面点云中无边界块,则保留全部点云;若地面点云中存在边界块,则以边界块内点云的x轴分量的均值作为分割阈值进行划分;
43、步骤62、机动车道点云数大于人行道点云数;
44、步骤63、合并所有段的机动车道点云和人行道点云。
45、作为本发明的一种优选实施方式,车载点云的机动车道与人行道分割系统,包括:存储器,用于存储可由处理器执行的指令;处理器,用于执行指令以实现车载点云的机动车道与人行道分割方法。
46、本发明的有益效果:
47、1、本发明首先利用垂直度区分路缘石区域和平坦区域;其次根据车载点云的距离越近、密度越大的特征确定行驶区域,移除非道路区域;最后根据道路横断面方向的连续有界性,从中块速准确地提取出机动车道和人行道的边界点云;
48、2、本发明方法可解释性强、可行性高、操作简单,大大提高了机动车道和人行道区域的自动分割的效率与准确性;
49、3、本发明方法操作简便、适应性强,显著提高了分割的准确性与效率,为智能交通管理和道路三维建模提供了重要技术支撑。
技术特征:
1.一种车载点云的机动车道与人行道分割方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的车载点云的机动车道与人行道分割方法,其特征在于,步骤二具体包括:
3.根据权利要求1所述的车载点云的机动车道与人行道分割方法,其特征在于,步骤四具体包括:
4.根据权利要求3所述的车载点云的机动车道与人行道分割方法,其特征在于,使用欧式距离计算任意两个点之间的距离。
5.根据权利要求3所述的车载点云的机动车道与人行道分割方法,其特征在于,步骤43具体包括:
6.根据权利要求1所述的车载点云的机动车道与人行道分割方法,其特征在于,步骤五具体包括:
7.根据权利要求6所述的车载点云的机动车道与人行道分割方法,其特征在于,分块是按照固定格网尺寸。
8.根据权利要求6所述的车载点云的机动车道与人行道分割方法,其特征在于,步骤55具体包括:
9.根据权利要求1所述的车载点云的机动车道与人行道分割方法,其特征在于,步骤六具体包括:
10.车载点云的机动车道与人行道分割系统,其特征在于,包括:存储器,用于存储可由处理器执行的指令;处理器,用于执行指令以实现如权利要求1-9任一项所述的车载点云的机动车道与人行道分割方法。
技术总结
本发明涉及点云处理技术领域,尤其涉及一种车载点云的机动车道与人行道分割方法,包括采集道路点云数据;通过计算点云的法向量和垂直度,保留垂直度在预设垂直度阈值范围内的点云,得到平坦区域点云;利用时间索引属性,将平坦区域点云进行等时间间隔分段;利用层次聚类对每段点云分别进行聚类分块,保留点数量最多的聚类簇点云为地面点云;对每段地面点云分别进行分块,利用连续有界性的高程判断准则,获取机动车道和人行道的边界点云;利用边界点云分割地面点云,根据点云数进行人行道和机动车道划分。本发明充分利用点云数据的空间特征和渐变有界特征,实现对机动车道与人行道的高效分割。
技术研发人员:刘胜男,马新江,梁玖
受保护的技术使用者:江苏城乡建设职业学院
技术研发日:
技术公布日:2025/4/17
- 还没有人留言评论。精彩留言会获得点赞!