用于水声目标识别的自相关结构分析方法、系统和装置与流程
本发明涉及水下目标识别,特别涉及一种用于水声目标识别的自相关结构分析方法、系统和装置。
背景技术:
1、传统的水声目标识别分类方法包括特征提取和分类器设计,其中主要依据是目标独特的特征信息,需要目标原始数据中存在可提取的能精确和简化表明目标状态和身份的信息。现有水声目标识别的特征提取方法主要包括基于船舶的物理结构特征、基于具有统计意义的时频特征量和基于声场结构的特征的方法三类。基于船舶的物理结构特征的方法通过提取具有物理意义明确的特征量,如螺旋桨桨叶数、螺旋桨转速等特征对目标进行检测后,再通过经验或数据库对目标类别进行识别,虚警率和误检率较高;基于具有统计意义的时频特征量的目标识别方法基于rcnn、yolo等主流目标检测框架实现提取目标的谱中心、谱形、谱起伏、窄带与宽带谱特征、倒谱特征、mel倒谱参数、音调频率参数等统计时频域特征,但由于声信道存在时变特性、相同目标的统计特性不稳定导致目标识别准确率较低等问题。
技术实现思路
1、本发明的一个目的在于提供一种用于水声目标识别的自相关结构分析方法、系统和装置,其中所述自相关结构分析方法采用基于声场结构的声源特征,利用自相关结构分析方法提取目标深度信息,从而达成目标识别的目标具有稳健性、准确率高的特点。
2、为了达到上述目的,本发明采用的技术方案是:一种用于水声目标识别的自相关结构分析方法,其中所述自相关结构分析方法包括如下步骤:
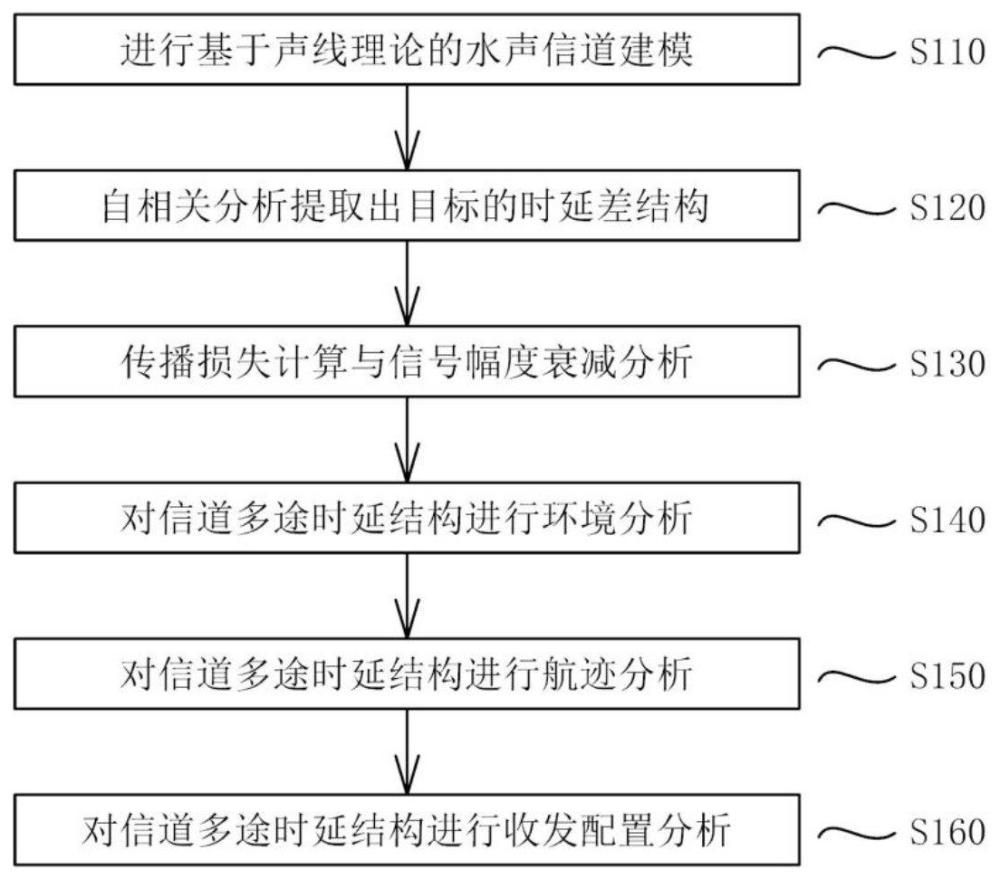
3、s1,进行基于声线理论的水声信号建模;
4、s2,自相关分析提取出目标的时延差结构,供将多途时延结构分类为多途时延结构a、多途时延结构b和多途时延结构c;
5、s3,分析声源深度、接收深度以及声源和接收间的相对距离,以选择多途时延结构a、多途时延结构b和多途时延结构c中的一个进行目标识别。
6、作为本发明的技术方案的进一步改进,在所述步骤s2中,自相关分析得到接收信号的自相关函数为:
7、,参数为声源信号的自相关函数,参数为噪声的自相关函数,接收信号的自相关函数在时出现峰值,其中峰值被提取之后,基于峰值估计时延值,其中仅经过一次海面反射的本征声线为本征声线s,仅经过一次海底反射的本征声线为本征声线b,先经过一次海面反射后经过一次海底反射的本征声线为本征声线sb,先经过一次海底反射后经过一次海面反射的本征声线为本征声线bs,其中多途时延结构由本征声线sb-b、本征声线sbs-bs两组时延差组成,多途时延结构b由本征声线s-d一组时延差组成,多途时延结构c由本征声线bs-b、本征声线bs-sb、本征声线sbs-b、本征声线sbs-sb四组时延差组成。
8、作为本发明的技术方案的进一步改进,在所述步骤s3中,分别分析信道多途时延结构的环境、航迹和收发配置,以选择多途时延结构a、多途时延结构b和多途时延结构c中的一个进行目标识别。
9、作为本发明的技术方案的进一步改进,在所述步骤s3之前,所述自相关结构分析方法包括步骤:传播损失计算与信号幅度衰减分析,供判断是否适用多途时延结构a、多途时延结构b和多途时延结构c进行目标识别。
10、作为本发明的技术方案的进一步改进,在所述步骤s3中,在目标深度大于280m且小于500m时,适用多途时延结构a进行目标识别,在目标深度大于500m时,适用多途时延结构b进行目标识别。
11、依本发明的另一个方面,本发明进一步提供一种用于水声目标识别的自相关结构分析系统,其包括:
12、建模单元,用于进行基于声线理论的水声信号建模;
13、分类单元,用于自相关分析提取出目标的时延差结构,供将多途时延结构分类为多途时延结构a、多途时延结构b和多途时延结构c;
14、选择单元,用于分析声源深度、接收深度以及声源和接收间的相对距离,以选择多途时延结构a、多途时延结构b和多途时延结构c中的一个进行目标识别。
15、作为本发明的技术方案的进一步改进,自相关分析得到接收信号的自相关函数为:
16、,参数为声源信号的自相关函数,参数为噪声的自相关函数,接收信号的自相关函数在时出现峰值,其中峰值被提取之后,基于峰值估计时延值,其中仅经过一次海面反射的本征声线为本征声线s,仅经过一次海底反射的本征声线为本征声线b,先经过一次海面反射后经过一次海底反射的本征声线为本征声线sb,先经过一次海底反射后经过一次海面反射的本征声线为本征声线bs,其中多途时延结构由本征声线sb-b、本征声线sbs-bs两组时延差组成,多途时延结构b由本征声线s-d一组时延差组成,多途时延结构c由本征声线bs-b、本征声线bs-sb、本征声线sbs-b、本征声线sbs-sb四组时延差组成。
17、作为本发明的技术方案的进一步改进,所述选择单元分别分析信道多途时延结构的环境、航迹和收发配置,以选择多途时延结构a、多途时延结构b和多途时延结构c中的一个进行目标识别。
18、作为本发明的技术方案的进一步改进,所述自相关结构分析系统包括计算单元,用于计算传播损失与信号幅度衰减分析,供判断是否适用多途时延结构a、多途时延结构b和多途时延结构c进行目标识别。
19、依本发明的另一个方面,本发明进一步提供一种计算装置,其包括处理器和被耦合于处理器的存储器,所述存储器用于存储程序指令,所述处理器用于执行所述程序指令,在所述程序指令被执行时,所述计算装置执行自相关结构分析方法,其中所述自相关结构分析方法包括如下步骤:
20、进行基于声线理论的水声信号建模;
21、自相关分析提取出目标的时延差结构,供将多途时延结构分类为多途时延结构a、多途时延结构b和多途时延结构c;
22、分析声源深度、接收深度以及声源和接收间的相对距离,以选择多途时延结构a、多途时延结构b和多途时延结构c中的一个进行目标识别。
23、与现有技术相比,本发明具有至少以下有益效果:
24、1、本发明通过将多途时延结构分类为多途时延结构a、多途时延结构b和多途时延结构c并分析出多途时延结构a、多途时延结构b和多途时延结构c的适用条件的方式,有利于后续基于多途时延结构a、多途时延结构b和多途时延结构c进行目标识别;
25、2、本发明通过计算传播损失与分析信号幅度衰减的方式能够判断是否适用多途时延结构a、多途时延结构b和多途时延结构c进行目标识别。
26、本发明的其他有效效果将在接下来的描述中被进一步揭露。
技术特征:
1.用于水声目标识别的自相关结构分析方法,其特征在于,所述自相关结构分析方法包括如下步骤:
2.根据权利要求1所述的自相关结构分析方法,其特征在于,在所述步骤s2中,自相关分析得到接收信号的自相关函数为:
3.根据权利要求1所述的自相关结构分析方法,其特征在于,在所述步骤s3中,分别分析信道多途时延结构的环境、航迹和收发配置,以选择多途时延结构a、多途时延结构b和多途时延结构c中的一个进行目标识别。
4.根据权利要求1所述的自相关结构分析方法,其特征在于,在所述步骤s3之前,所述自相关结构分析方法包括步骤:传播损失计算与信号幅度衰减分析,供判断是否适用多途时延结构a、多途时延结构b和多途时延结构c进行目标识别。
5.根据权利要求1所述的自相关结构分析方法,其特征在于,在所述步骤s3中,在目标深度大于280m且小于500m时,适用多途时延结构a进行目标识别,在目标深度大于500m时,适用多途时延结构b进行目标识别。
6.用于水声目标识别的自相关结构分析系统,其特征在于,包括:
7.根据权利要求6所述的自相关结构分析系统,其特征在于,自相关分析得到接收信号的自相关函数为:
8.根据权利要求6所述的自相关结构分析系统,其特征在于,所述选择单元分别分析信道多途时延结构的环境、航迹和收发配置,以选择多途时延结构a、多途时延结构b和多途时延结构c中的一个进行目标识别。
9.根据权利要求6所述的自相关结构分析系统,其特征在于,所述自相关结构分析系统包括计算单元,用于计算传播损失与信号幅度衰减分析,供判断是否适用多途时延结构a、多途时延结构b和多途时延结构c进行目标识别。
10.计算装置,其特征在于,包括处理器和被耦合于处理器的存储器,所述存储器用于存储程序指令,所述处理器用于执行所述程序指令,在所述程序指令被执行时,所述计算装置执行如权利要求1至5中任一所述的自相关结构分析方法。
技术总结
本公开了一种用于水声目标识别的自相关结构分析方法、系统和装置,属于水下目标识别技术领域,所述自相关结构分析方法包括步骤:S1,进行基于声线理论的水声信号建模;S2,自相关分析提取出目标的时延差结构,供将多途时延结构分类为多途时延结构A、多途时延结构B和多途时延结构C;S3,分析声源深度、接收深度以及声源和接收间的相对距离,以选择多途时延结构A、多途时延结构B和多途时延结构C中的一个进行目标识别。通过将多途时延结构分类为多途时延结构A、B和C并分析出多途时延结构A、B和C的适用条件的方式,有利于后续基于多途时延结构A、B和C进行目标识别。
技术研发人员:李昕昱,范勇刚
受保护的技术使用者:云南保利天同水下装备科技有限公司
技术研发日:
技术公布日:2025/2/5
- 还没有人留言评论。精彩留言会获得点赞!