一种机械设备的控制系统的制作方法
本申请涉及虚拟现实,尤其涉及一种机械设备的控制系统。
背景技术:
1、工程机械在建筑、挖掘、运输、加工、以及修理等领域中有着广泛的应用,如,挖掘机、起重机等,在此类工程机械的控制中,除人工在驾驶舱中进行操作的方式之外,目前还可以使用无线遥控的方式进行操作。
2、虽然无线遥控的方式无需在驾驶舱,即可控制机械末端,但是此种操作方式存在不直观、不灵活等问题,在一些救援、救灾、防爆、精细化控制等场景中,需要更加灵活、精准的机械控制方式来代替本应由人工进行的操作。
3、因此,需要重新设计一种机械设备的控制系统,以更加灵活、直观、精准的对机械设备进行控制。
技术实现思路
1、本申请实施例提供一种机械设备的控制系统,以更加灵活、精准的对机械设备进行控制。
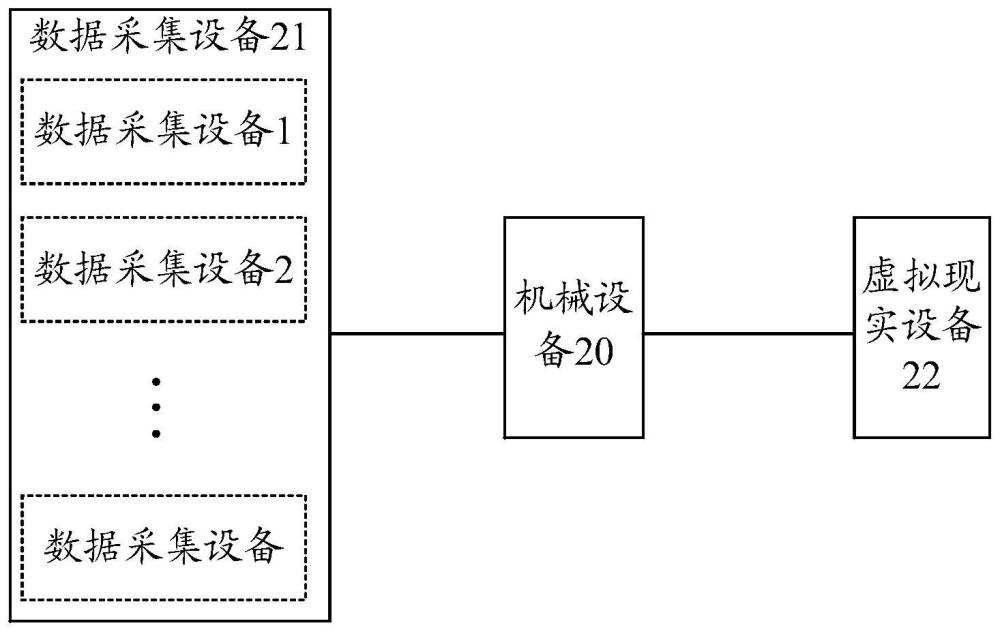
2、本申请实施例提供一种机械设备的控制系统,包括:机械设备、设置在所述机械设备上的数据采集设备,以及与所述机械设备通信连接的虚拟现实设备,其中,
3、所述数据采集设备,实时采集所述机械设备的状态数据,并将所述状态数据发送至所述机械设备;
4、所述机械设备,接收所述数据采集设备上报的状态数据,将所述状态数据发送至所述虚拟现实设备,并接收所述虚拟现实设备发送的控制命令,基于所述控制命令执行相应的动作;
5、所述虚拟现实设备,基于接收到的所述机械设备发送的状态数据,更新预先创建的机械设备模型的位置和状态,并获取对象的手部位置数据,基于所述手部位置数据识别所述对象的手势,基于所述对象的手势获取相应的控制命令,将所述控制命令发送至所述机械设备。
6、可选的,所述虚拟现实设备,包括:可穿戴的数据采集设备,用于采集所述对象的手部位置数据。
7、可选的,所述可穿戴的数据采集设备包括数据手套。
8、可选的,所述机械设备包括底盘,所述虚拟现实设备,包括:定位设备、控制设备、以及通信设备;
9、所述控制设备,用于在控制所述机械设备的底盘移动时,控制所述定位设备获取所述对象手部的移动幅度,基于所述移动幅度,确定控制所述机械设备移动时的移动速度;
10、所述通信设备,用于将所述移动速度发送至所述机械设备,以控制所述机械设备以所述移动速度进行移动。
11、可选的,所述机械设备包括臂架;
12、所述控制设备,还用于在控制所述机械设备的臂架移动时,控制所述定位设备获取所述对象手部的位置变化以及角度变化,并基于所述位置变化和所述角度变化,确定所述臂架的移动量和旋转角度;
13、所述通信设备,还用于将确定出的所述臂架的移动量和旋转角度,发送至所述机械设备,以控制所述机械设备的臂架进行运动。
14、可选的,所述虚拟现实设备,包括:可穿戴显示设备,用于显示所述机械设备的模型,展示所述机械设备的位置和状态。
15、可选的,所述可穿戴显示设备包括虚拟现实眼镜。
16、可选的,所述数据采集设备包括以下一种或多种:卫星定位传感器、方向传感器、倾角传感器、一个或多个采集所述机械设备工作状态参数的传感器。
17、可选的,所述机械设备包括臂架和底盘,所述控制命令包括以下一种或多种:所述机械设备的臂架控制命令、所述机械设备的底盘回转控制命令、所述机械设备的行走控制命令。
18、可选的,所述机械设备包括:连接检测设备,用于通过心跳检测确定与所述虚拟现实设备的网络连接是否正常,并在确定与所述虚拟现实设备的网络连接异常时,控制所述机械设备停止工作。
19、本申请有益效果如下:
20、本申请实施例提供的机械设备的控制系统,利用虚拟现实设备实时获取对象的手部位置数据,基于手部位置数据,确定对象手部的手势,进而基于对象的手势对机械设备进行控制,与现有无线遥控方式相比,通过手势对机械设备进行控制,摆脱了遥控设备的按键限制,可以使用更多的手势或者手势组对机械设备进行控制,从而使得对机械设备的控制更加的灵活、便捷和精准。
21、本申请的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本申请而了解。本申请的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
技术特征:
1.一种机械设备的控制系统,其特征在于,包括:机械设备、设置在所述机械设备上的数据采集设备,以及与所述机械设备通信连接的虚拟现实设备,其中,
2.根据权利要求1所述的系统,其特征在于,所述机械设备包括底盘,所述虚拟现实设备,包括:定位设备、控制设备、以及通信设备;
3.根据权利要求2所述的系统,其特征在于,所述机械设备包括臂架;
4.根据权利要求1所述的系统,其特征在于,所述虚拟现实设备,包括:可穿戴显示设备,用于显示所述机械设备的模型,展示所述机械设备的位置和状态。
5.根据权利要求4所述的系统,其特征在于,所述可穿戴显示设备包括虚拟现实眼镜。
6.根据权利要求1-5中任一项所述的系统,其特征在于,所述数据采集设备包括以下一种或多种:卫星定位传感器、方向传感器、倾角传感器、一个或多个采集所述机械设备工作状态参数的传感器。
7.根据权利要求1-5中任一项所述的系统,其特征在于,所述机械设备包括臂架和底盘,所述控制命令包括以下一种或多种:所述机械设备的臂架控制命令、所述机械设备的底盘回转控制命令、所述机械设备的行走控制命令。
8.根据权利要求1-5中任一项所述的系统,其特征在于,所述机械设备包括:连接检测设备,用于通过心跳检测确定与所述虚拟现实设备的网络连接是否正常,并在确定与所述虚拟现实设备的网络连接异常时,控制所述机械设备停止工作。
技术总结
本申请涉及虚拟现实技术领域,尤其涉及一种机械设备的控制系统,以更加灵活、精准的对机械设备进行控制。其中,系统包括:机械设备、数据采集设备,以及与机械设备通信连接的虚拟现实设备,数据采集设备,实时采集机械设备的状态数据,并将状态数据发送至机械设备;机械设备,接收数据采集设备上报的状态数据,将状态数据发送至虚拟现实设备,并接收虚拟现实设备发送的控制命令,基于控制命令执行相应的动作;虚拟现实设备,基于接收到的机械设备发送的状态数据,更新预先创建的机械设备模型的位置和状态,并获取对象的手部位置数据,基于手部位置数据识别对象的手势,基于对象的手势获取相应的控制命令,将控制命令发送至机械设备。
技术研发人员:付玲,彭勇波,邓奇,刘延斌,于晓颖,董胜豪,尹莉,袁野
受保护的技术使用者:中联重科股份有限公司
技术研发日:20240220
技术公布日:2025/2/13
- 还没有人留言评论。精彩留言会获得点赞!