一种港口物流管控方法及系统与流程
本申请涉及港口物流管控,具体涉及一种港口物流管控方法及系统。
背景技术:
1、港口物流管控旨在通过集成先进的信息技术和智能调度系统,优化港口内的物流运作流程,提高货物装卸、转运及仓储等环节的效率。然而,在港口管控中,面临一个重要问题,即如何实现船期与卡车运输的有效同步调控,以提高整体运营效率。由于船舶到达时间和卡车调度受到多种不确定因素的影响,如天气状况、港口拥堵和运输距离等,如果船期与卡车运输无法实现有效匹配,则可能导致资源浪费和延误,进而影响整个物流链条的效率。
技术实现思路
1、有鉴于此,本公开实施例提供了一种港口物流管控方法,至少部分解决现有技术中存在的问题。
2、第一方面,提供了一种港口物流管控方法,包括:
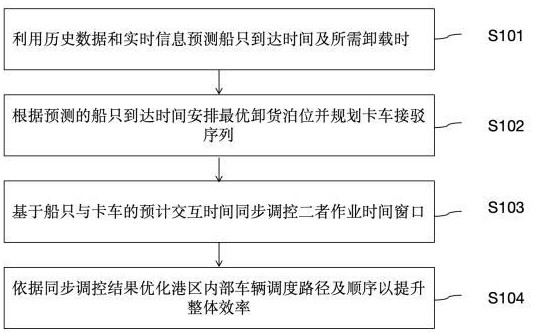
3、利用历史数据和实时信息预测船只到达时间及所需卸载时长;
4、根据预测的船只到达时间安排最优卸货泊位并规划卡车接驳序列;
5、基于船只与卡车的预计交互时间同步调控二者作业时间窗口;
6、依据同步调控结果优化港区内部车辆调度路径及顺序以提升整体效率。
7、具体地,所述基于船只与卡车的预计交互时间同步调控二者作业时间窗口,包括:
8、获取船只预计卸载完成时间和卡车预计到达卸货区时间;
9、计算船只与卡车预计交互时间差,公式为:δt = |t1 - t2|,其中δt为时间差,t1为船只预计卸载完成时间,t2为卡车预计到达卸货区时间;
10、基于时间差δt,若δt > tt,则调整卡车出发时间提前δt - tt,使卡车提前到达卸货区等待,其中tt为设定的等待时间阈值;
11、若δt ≤ tt,则保持卡车原定出发时间不变,船只按计划卸载,实现二者作业时间窗口同步。
12、具体地,基于时间差δt调整卡车出发时间的步骤,包括:
13、确定卡车可提前的最长时间段t3;
14、基于δt - tt与t3的关系,若δt - tt > t3,则将卡车出发时间提前至最大提前时间t3;
15、若δt - tt ≤ t3,则将卡车出发时间提前δt - tt;
16、根据卡车提前到达的时间,重新规划卡车在卸货区的等待区域,确保卡车有序等待。
17、具体地,基于δt - tt与t3的关系调整卡车出发时间,包括:
18、计算卡车提前到达后在卸货区的等待成本c1,公式为:c1 = k1 × (δt - tt),其中k1为单位时间等待成本系数;
19、基于c1与预设成本阈值ct的关系,若c1 > ct,则重新评估卡车提前时间,寻找成本与时间平衡点;
20、若c1 ≤ ct,则按原计划调整卡车出发时间;
21、在调整过程中,实时监测卡车油量等状态,确保卡车能够按时到达。
22、具体地,基于c1与ct的关系重新评估卡车提前时间,包括:
23、确定卡车可调整的最小时间单位δt_m;
24、基于c1与ct的差值,计算可调整的时间步长n,公式为:n = (c1 - ct) / (k1×δt_m);
25、若n为正整数,则将卡车出发时间提前n × δt_m;
26、若n为负数或零,则保持原计划调整时间不变,并记录此次成本超阈值情况,用于后续优化策略调整。
27、具体地,还包括基于泊位作业进度反馈调整后续船舶的靠泊计划和泊位分配,包括:
28、获取当前泊位作业完成进度和预计剩余作业时间;
29、计算后续船舶预计到达时间t4和当前泊位预计空闲时间t5的时间差δtp,公式为:δtp = |t4 - t5|;
30、若δtp > tp,则提前安排后续船舶靠泊计划,缩短船舶等待时间,其中tp为设定的泊位等待时间阈值。
31、具体地,所述基于泊位作业进度反馈调整后续船舶的靠泊计划和泊位分配,还包括:
32、确定后续船舶可提前到达的最大时间t6;
33、基于δtp与tp的关系,若δtp > tp且t6 > 0,则将后续船舶靠泊时间提前至最早可安排时间;
34、若δtp < tp,则维持原靠泊计划不变;
35、根据船舶提前靠泊情况,重新规划船舶进港航道和引航资源分配。
36、具体地,所述基于δtp与tp的关系,若δtp > tp且t6 > 0,则将后续船舶靠泊时间提前至最早可安排时间,还包括:
37、计算船舶提前靠泊后在泊位的等待成本c2,公式为:c2 = k2 × (tp - δtp),其中k2为单位时间船舶等待成本系数;
38、基于c2与预设船舶成本阈值c3的关系,若c2 > c3,则重新评估船舶提前时间,寻找成本与时间平衡点;
39、若c2 ≤ c3,则按原计划调整船舶靠泊时间;
40、在调整过程中,实时监测船舶燃油储备等状态,确保船舶能够顺利靠泊。
41、具体地,所述基于c2与预设船舶成本阈值c3的关系,若c2 > c3,则重新评估船舶提前时间,寻找成本与时间平衡点,还包括:
42、确定船舶可调整的最小时间单位δtm;
43、基于c2与c3的差值,计算可调整的时间步长m,公式为:m = (c2 - c3) / (k2 ×δtm);
44、若m为正整数,则将船舶靠泊时间推迟m × δtm;
45、若m为负数或零,则保持原计划调整时间不变,并记录此次成本超阈值情况,用于后续优化策略调整。
46、第二方面,本申请的一种港口物流管控系统,包括:
47、预测模块,利用历史数据和实时信息预测船只到达时间及所需卸载时长;
48、规划模块,根据预测的船只到达时间安排最优卸货泊位并规划卡车接驳序列;
49、调控模块,基于船只与卡车的预计交互时间同步调控二者作业时间窗口;
50、控制模块,依据同步调控结果优化港区内部车辆调度路径及顺序以提升整体效率。
51、本公开实施例提供了一种港口物流管控方法,包括:利用历史数据和实时信息预测船只到达时间及所需卸载时长;根据预测的船只到达时间安排最优卸货泊位并规划卡车接驳序列;基于船只与卡车的预计交互时间同步调控二者作业时间窗口;依据同步调控结果优化港区内部车辆调度路径及顺序以提升整体效率。通过本公开实施例的方案,能够解决如何对船期与卡车进行同步调控以提高整体效率。
技术特征:
1.一种港口物流管控方法,其特征在于,包括:
2.根据权利要求1所述的港口物流管控方法,其特征在于,所述基于船只与卡车的预计交互时间同步调控二者作业时间窗口,包括:
3. 根据权利要求2所述的港口物流管控方法,其特征在于,所述基于时间差δt,若δt> tt,则调整卡车出发时间提前δt - tt,使卡车提前到达卸货区等待,进一步包括:
4. 根据权利要求3所述的港口物流管控方法,其特征在于,所述基于δt - tt与t3的关系,若δt - tt > t3,则将卡车出发时间提前至最大提前时间t3,包括:
5. 根据权利要求4所述的港口物流管控方法,其特征在于,所述基于c1与预设成本阈值ct的关系,若c1 > ct,则重新评估卡车提前时间,包括:
6.根据权利要求1所述的港口物流管控方法,其特征在于,还包括基于泊位作业进度反馈调整后续船舶的靠泊计划和泊位分配,包括:
7.根据权利要求6所述的港口物流管控方法,其特征在于,所述基于泊位作业进度反馈调整后续船舶的靠泊计划和泊位分配,还包括:
8. 根据权利要求7所述的港口物流管控方法,其特征在于,所述基于δtp与tp的关系,若δtp > tp且t6 > 0,则将后续船舶靠泊时间提前至最早可安排时间,还包括:
9. 根据权利要求8所述的港口物流管控方法,其特征在于,所述基于c2与预设船舶成本阈值c3的关系,若c2 > c3,则重新评估船舶提前时间,寻找成本与时间平衡点,还包括:
10.一种港口物流管控系统,其特征在于,包括:
技术总结
本公开实施例提供了一种港口物流管控方法及系统,属于港口物流管控技术领域,所述方法包括:利用历史数据和实时信息预测船只到达时间及所需卸载时长;根据预测的船只到达时间安排最优卸货泊位并规划卡车接驳序列;基于船只与卡车的预计交互时间同步调控二者作业时间窗口;依据同步调控结果优化港区内部车辆调度路径及顺序以提升整体效率。通过本公开实施例的方案,能够解决如何对船期与卡车进行同步调控以提高整体效率。
技术研发人员:马晓东,柳威,李健,阮锴,孙洁,田玉华,王举庆,林大凯,付积庆,郭士杰,魏健,李卓洋,胡少博,郑晓巍
受保护的技术使用者:山东港口烟台港集团有限公司
技术研发日:
技术公布日:2025/3/6
- 还没有人留言评论。精彩留言会获得点赞!