一种基于人工智能的遥感影像目标识别方法和系统与流程
本申请涉及数据处理,尤其是涉及一种基于人工智能的遥感影像目标识别方法和系统。
背景技术:
1、遥感影像目标识别主要基于模式识别的理论和方法,即利用计算机或其他装置对图像中的物体、图形等信息进行自动识别。在遥感领域,这通常涉及对遥感图像中地物的光谱特征、纹理特征、空间特征、时相特征等的提取和分析,从而实现对目标地物的识别。
2、目前,覆盖区域内的小型无人终端开始携带遥感设备进行主动侦查,用来提高对覆盖区域的感知能力,使用遥感手段进行侦查的优势在于数据丰富度和远距离侦查,但是在数据处理上存在一定难度,例如目前出现的因相似目标重叠导致的无法识别和数量识别错误,如何解决还需要进一步研究。
技术实现思路
1、本申请提供一种基于人工智能的遥感影像目标识别方法和系统,使用范围提取和对缺失位置的补充检索提取手段来实现重叠目标的识别,用以提高相似目标的数量识别精度。
2、本申请的上述目的是通过以下技术方案得以实现的:
3、第一方面,本申请提供了一种基于人工智能的遥感影像目标识别方法,包括:
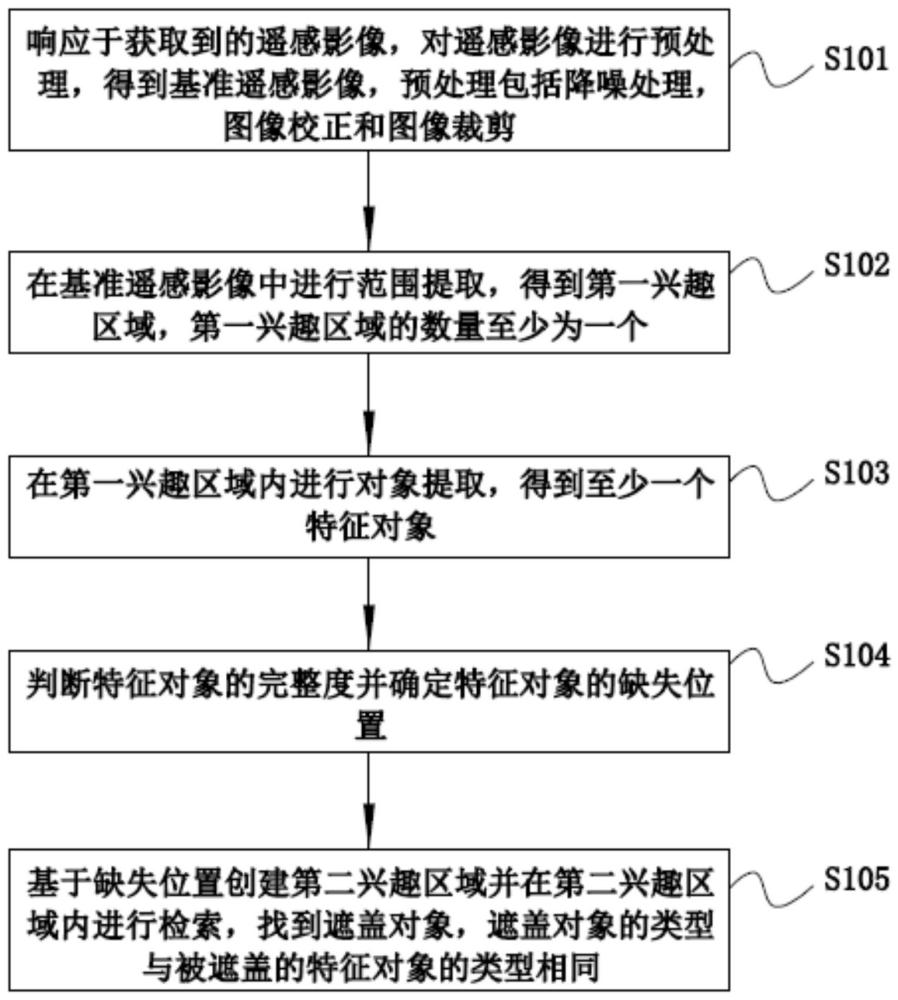
4、响应于获取到的遥感影像,对遥感影像进行预处理,得到基准遥感影像,预处理包括降噪处理,图像校正和图像裁剪;
5、在基准遥感影像中进行范围提取,得到第一兴趣区域,第一兴趣区域的数量至少为一个;
6、在第一兴趣区域内进行对象提取,得到至少一个特征对象;
7、判断特征对象的完整度并确定特征对象的缺失位置;
8、基于缺失位置创建第二兴趣区域并在第二兴趣区域内进行检索,找到遮盖对象,遮盖对象的类型与被遮盖的特征对象的类型相同。
9、在第一方面的一种可能的实现方式中,在基准遥感影像中进行范围提取并得到第一兴趣区域包括:
10、使用边缘检测方式基准遥感影像中进行范围提取,得到疑似第一兴趣区域;
11、对疑似第一兴趣区域包括的内容进行分块处理并确定每一个分块的类型;
12、使用分块的类型对疑似第一兴趣区域进行缩小,得到第一兴趣区域。
13、在第一方面的一种可能的实现方式中,使用分块的类型对疑似第一兴趣区域进行缩小包括:
14、根据分块的类型的汇集度确定至少一个汇集区域并将类型为相同的汇集区域进行整合处理,记为第一整合汇集区域;
15、将位于第一整合汇集区域内部的其他分块纳入到第一整合汇集区域,得到第二整合汇集区域;
16、将第二整合汇集区域作为第一兴趣区域;
17、其中,将类型为相同的汇集区域进行整合处理时,要求类型为相同的汇集区域的围拢面积最小。
18、在第一方面的一种可能的实现方式中,基于缺失位置创建第二兴趣区域包括:
19、在特征对象的边缘上随机取多个特征点;
20、计算特征点的特征值,特征值包括颜色均值和确定方向上的颜色变化度;
21、根据特征点的特征值尝试对特征对象的缺失位置进行重建并在重建的缺失位置处创建第二兴趣区域。
22、在第一方面的一种可能的实现方式中,在第二兴趣区域内进行检索包括:
23、在缺失位置的两个断点处分别创建一个选择区域并在选择区域生成选择算子;
24、使用选择算子在第二兴趣区域内进行检索,得到参考分界点;
25、使用得到的参考分界点生成分界线,分界线的两个端点分别与缺失位置的两个断点重合;
26、其中,选择区域中包括的内容均参与生成选择算子。
27、在第一方面的一种可能的实现方式中,生成选择算子时,生成的选择算子包括两组像素点,同一组像素点之间的差值在第一允许范围内,两组像素点的分界线两侧的差值在第二允许范围内。
28、在第一方面的一种可能的实现方式中,当无法生成选择算子时,还包括:
29、对选择区域进行分层处理,得到多个子选择区域,每一个子选择区域对应一个颜色区间;
30、使用子选择区域中包括的内容生成选择算子,选择算子包括像素点和空白点。
31、第二方面,本申请提供了一种基于人工智能的遥感影像目标识别装置,包括:
32、预处理单元,用于响应于获取到的遥感影像,对遥感影像进行预处理,得到基准遥感影像,预处理包括降噪处理,图像校正和图像裁剪;
33、范围提取单元,用于在基准遥感影像中进行范围提取,得到第一兴趣区域,第一兴趣区域的数量至少为一个;
34、对象提取单元,用于在第一兴趣区域内进行对象提取,得到至少一个特征对象;
35、判断单元,用于判断特征对象的完整度并确定特征对象的缺失位置;
36、检索单元,用于基于缺失位置创建第二兴趣区域并在第二兴趣区域内进行检索,找到遮盖对象,遮盖对象的类型与被遮盖的特征对象的类型相同。
37、第三方面,本申请提供了一种基于人工智能的遥感影像目标识别系统,所述系统包括:
38、一个或多个存储器,用于存储指令;以及
39、一个或多个处理器,用于从所述存储器中调用并运行所述指令,执行如第一方面及第一方面任意可能的实现方式中所述的方法。
40、第四方面,本申请提供了一种计算机可读存储介质,所述计算机可读存储介质包括:
41、程序,当所述程序被处理器运行时,如第一方面及第一方面任意可能的实现方式中所述的方法被执行。
42、第五方面,本申请提供了一种计算机程序产品,包括程序指令,当所述程序指令被计算设备运行时,如第一方面及第一方面任意可能的实现方式中所述的方法被执行。
43、第六方面,本申请提供了一种芯片系统,该芯片系统包括处理器,用于实现上述各方面中所涉及的功能,例如,生成,接收,发送,或处理上述方法中所涉及的数据和/或信息。
44、该芯片系统,可以由芯片构成,也可以包括芯片和其他分立器件。
45、在一种可能的设计中,该芯片系统还包括存储器,该存储器,用于保存必要的程序指令和数据。该处理器和该存储器可以解耦,分别设置在不同的设备上,通过有线或者无线的方式连接,或者处理器和该存储器也可以耦合在同一个设备上。
技术特征:
1.一种基于人工智能的遥感影像目标识别方法,其特征在于,包括:
2.根据权利要求1所述的基于人工智能的遥感影像目标识别方法,其特征在于,在基准遥感影像中进行范围提取并得到第一兴趣区域包括:
3.根据权利要求2所述的基于人工智能的遥感影像目标识别方法,其特征在于,使用分块的类型对疑似第一兴趣区域进行缩小包括:
4.根据权利要求1至3中任意一项所述的基于人工智能的遥感影像目标识别方法,其特征在于,基于缺失位置创建第二兴趣区域包括:
5.根据权利要求4所述的基于人工智能的遥感影像目标识别方法,其特征在于,在第二兴趣区域内进行检索包括:
6.根据权利要求4所述的基于人工智能的遥感影像目标识别方法,其特征在于,生成选择算子时,生成的选择算子包括两组像素点,同一组像素点之间的差值在第一允许范围内,两组像素点的分界线两侧的差值在第二允许范围内。
7.根据权利要求6所述的基于人工智能的遥感影像目标识别方法,其特征在于,当无法生成选择算子时,还包括:
8.一种基于人工智能的遥感影像目标识别装置,其特征在于,包括:
9.一种基于人工智能的遥感影像目标识别系统,其特征在于,所述系统包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括:
技术总结
本申请涉及一种基于人工智能的遥感影像目标识别方法和系统,方法包括响应于获取到的遥感影像,对遥感影像进行预处理,得到基准遥感影像,预处理包括降噪处理,图像校正和图像裁剪;在基准遥感影像中进行范围提取,得到第一兴趣区域;在第一兴趣区域内进行对象提取,得到至少一个特征对象;判断特征对象的完整度并确定特征对象的缺失位置;基于缺失位置创建第二兴趣区域并在第二兴趣区域内进行检索,找到遮盖对象,遮盖对象的类型与被遮盖的特征对象的类型相同。本申请公开的基于人工智能的遥感影像目标识别方法和系统,使用范围提取和对缺失位置的补充检索提取手段来实现重叠目标的识别,用以提高相似目标的数量识别精度。
技术研发人员:姜艳川,王振刚,张学宇,马保群,程贺军
受保护的技术使用者:北京瞰天科技有限公司
技术研发日:
技术公布日:2025/3/18
- 还没有人留言评论。精彩留言会获得点赞!