一种基于物联网数据仓库管理系统的制作方法
本发明涉及管理系统,具体为一种基于物联网数据仓库管理系统。
背景技术:
1、随着物联网技术在仓库管理领域的广泛使用,对于仓库环境与储存货物的数据监测与匹配越来越科学,基于多源数据的仓库环境与储存货物的适应度分析可以避免仓库环境对于货品储存过程中的质量影响,针对仓库中常见的易受潮货物的存放环境监测是现阶段常见的仓库数据监测领域,对易受潮的货物的存放环境如果不能及时监测,会造成产品质量的下降,影响其使用。
2、传统仓库管理系统存在环境监测精度与实时性不足:传感器覆盖密度低,存在监测盲区,单模态数据采集(如仅温度或湿度)导致环境评估片面,且数据更新延迟高(通常>1分钟),难以及时响应变化。
3、且路径规划安全性与效率矛盾:rrt算法路径曲率大(常出现r<0.5m的急转弯),动态避障响应慢(>2秒),多机器人协作易死锁。
技术实现思路
1、本发明的目的在于提供一种基于物联网数据仓库管理系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:一种基于物联网数据仓库管理系统,包括:
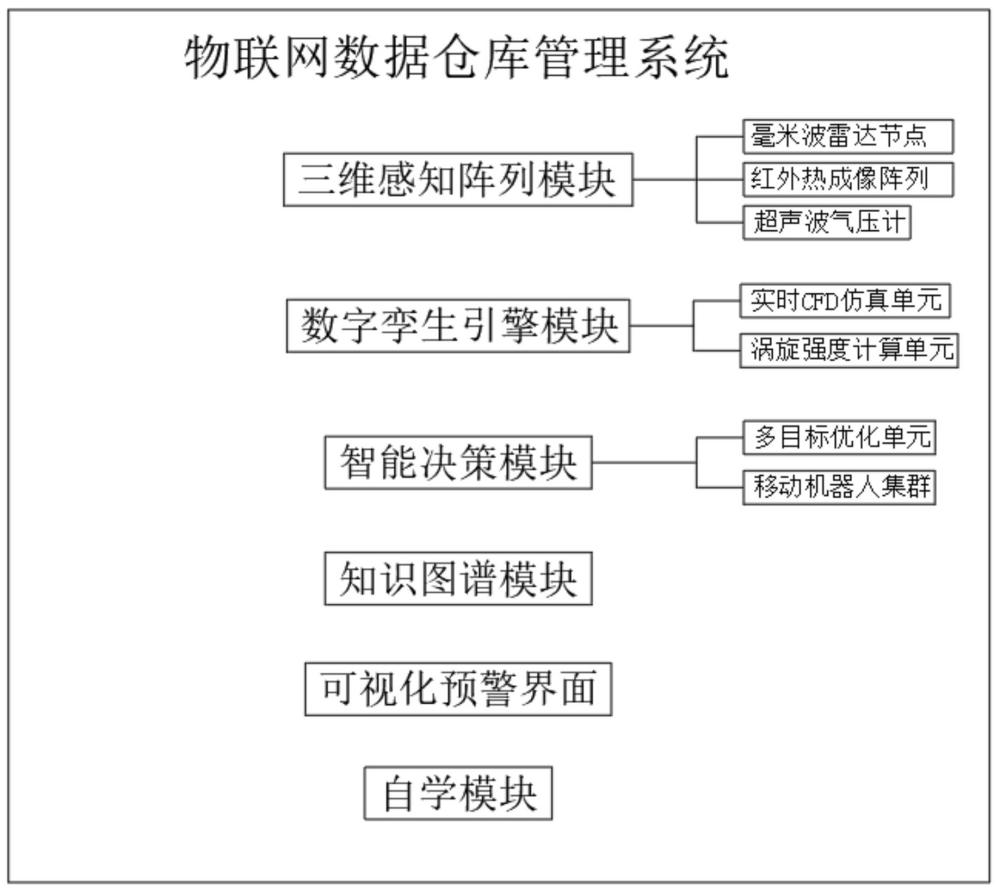
3、三维感知阵列模块,包含均匀部署的毫米波雷达节点、红外热成像阵列和超声波气压计,形成5m×5m×3m的蜂窝状监测网格;数字孪生引擎模块,包括:(a)实时cfd仿真单元,基于改进的openfoam架构构建,采用涡度-速度法求解navier-stokes方程:
4、
5、其中ω为涡度场,u为速度场,ν为运动粘度系数;(b)涡旋强度计算单元,按公式(1)计算区域涡旋强度:
6、(1)
7、当γ≥0.35时标记为强扰动区域;智能决策模块,包含:
8、(c)多目标优化单元,建立包含能耗、货品保质期和环境达标率的损失函数:
9、
10、其中α、β、γ通过q-learning动态调整,e-能耗,t-货品保质期,h-环境达标率;(d)移动机器人集群,配备6自由度机械臂和微型涡扇阵列,基于拍卖算法实现多机协同,移动机器人配备uwb定位模块和防碰撞传感器,在密集货架区的导航误差≤3cm;知识图谱模块,构建包含1200+sku的环境敏感性数据库,定义货品环境耐受度指标:
11、其中,δt-暴露时长,τ-耐受系数,γ-涡旋强度,t-温度,当s值下降速率超过15%/周时触发三级预警;
12、所述三维感知阵列模块的输出端与数字孪生引擎模块的输入端连接,所述数字孪生引擎模块的输出端与智能决策模块的输入端连接,所述智能决策模块的输出端与移动机器人集群的输入端连接,所述知识图谱模块的输出端与智能决策模块的输入端连接。
13、所述三维感知阵列模块的部署方法包括:沿仓库立柱设置基准节点,间距≤8m,立柱节点垂直间隔≤3m,水平间距6.8m;在货架间隔层部署补充节点,垂直间距≤2.5m;所有节点采用lorawan协议组网,数据传输延迟≤50ms。
14、所述实时cfd仿真单元的运行方法包括:采用自适应网格划分技术,关键区域网格密度达到200节点/m³;实施混合精度计算:涡旋强度γ≥0.2区域使用fp32精度,其余区域使用fp16精度;每30秒更新一次全场流体动力学模型。
15、所述移动机器人集群的控制方法包括:建立三维slam地图,定位精度±2cm;涡扇阵列支持8档风速调节(0.5-8m/s);半导体除湿模块功率密度达3w/cm³;多机任务分配响应时间≤500ms。
16、所述知识图谱模块的构建方法包括:采用图神经网络分析环境参数与货品劣化的时空关联;利用对比学习生成新sku初始参数:
17、=
18、其中,q为新sku查询向量,k⁺为正样本键向量,k⁻为负样本键向量,为余弦相似度函数,为温度系数,n为负样本数量,负样本数量n≥1024,温度系数τ∈[0.05,0.2];
19、部署联邦学习节点实现跨仓库知识共享,所述联邦学习节点采用防梯度泄露参数聚合方法,所述联邦学习节点参数聚合满足:
20、
21、其中,为平滑常数,为聚合权重向量,为第i节点本地权重,为本地参数方差,∈[1]。
22、还包括动态基线校准模块,所述动态基线校准模块的输出端与智能决策模块的输入端连接,动态基线校准模块通过卡尔曼滤波建立环境参数耦合模型:
23、
24、其中a为环境参数转移矩阵,b为设备控制系数矩阵,为过程噪声,所述动态基线校准模块的运行频率为每分钟执行一次全仓校准,异常参数波动阈值设置为±2σ,其中σ为近24小时参数标准差,所述σ值按公式计算:
25、
26、其中n取最近24小时内采集的1440个数据点。
27、还包括可视化预警界面,所述可视化预警界面实时显示涡旋强度热力图、货品风险等级分布、机器人集群工作状态以及能耗实时监测曲线,且可视化预警界面基于webgl引擎,色阶映射周期≤1秒。
28、所述移动机器人采用rrt*算法生成无碰撞路径,所述rrt*算法运行时满足:采样频率≥1000次/秒,路径优化迭代次数≥50次,执行以下步骤:基于slam地图构建三维占据栅格;
29、设置目标点吸引力函数,为吸引力大小,为吸引力系数,q为当前位姿,为目标点位姿,所述吸引力系数根据实时路径曲率动态调节,满足:
30、
31、采用双向搜索策略,当两棵树间距<0.5m时进行路径连接;
32、路径优化阶段删除冗余节点,确保路径曲率半径≥0.8m。
33、还包括自学习模块,所述自学习模块的输出端分别与三维感知阵列模块、数字孪生引擎模块、动态基线校准模块、智能决策模块、知识图谱模块、移动机器人集群以及可视化预警界面连接,所述自学习模块每24小时执行一次全局参数优化,包括:q-learning策略更新、cfd模型参数校准以及知识图谱关系权重调整。
34、所述系统初始化时执行:建立三维基准坐标系、部署感知节点以及训练联邦学习模型,具体包括:通过激光扫描仪建立三维基准坐标系,原点设于仓库几何中心;沿立柱每8m部署基准节点,货架层高2m处部署补充节点;联邦学习模型预训练阶段采用dirichlet分布分配参数:
35、p()=
36、所述dirichlet分布的浓度参数α∈(0.3,0.7],优先α=0.5,k为类别总数,为k维概率向量。
37、与现有技术相比,本发明的有益效果是:
38、本系统通过感知、建模、决策、执行以及优化五层架构实现闭环管理,实现多物理场耦合仿真与多目标动态优化的深度结合,相比传统方案,路径合格率提升、预警响应速度加快、综合能耗降低,为现代智能仓库提供了高精度、强适应性的管理范式。
技术特征:
1.一种基于物联网数据仓库管理系统,其特征在于,包括:
2.根据权利要求1所述的一种基于物联网数据仓库管理系统,其特征在于,所述三维感知阵列模块的部署方法包括:沿仓库立柱设置基准节点,间距≤8m,立柱节点垂直间隔≤3m,水平间距6.8m;在货架间隔层部署补充节点,垂直间距≤2.5m;所有节点采用lorawan协议组网,数据传输延迟≤50ms。
3.根据权利要求1所述的一种基于物联网数据仓库管理系统,其特征在于,所述实时cfd仿真单元的运行方法包括:采用自适应网格划分技术,关键区域网格密度达到200节点/m³;实施混合精度计算:涡旋强度γ≥0.2区域使用fp32精度,其余区域使用fp16精度;每30秒更新一次全场流体动力学模型。
4.根据权利要求1所述的一种基于物联网数据仓库管理系统,其特征在于,所述移动机器人集群的控制方法包括:建立三维slam地图,定位精度±2cm;涡扇阵列支持8档风速调节(0.5-8m/s);半导体除湿模块功率密度达3w/cm³;多机任务分配响应时间≤500ms。
5.根据权利要求1所述的一种基于物联网数据仓库管理系统,其特征在于,所述知识图谱模块的构建方法包括:采用图神经网络分析环境参数与货品劣化的时空关联;利用对比学习生成新sku初始参数:
6.根据权利要求1所述的一种基于物联网数据仓库管理系统,其特征在于,还包括动态基线校准模块,所述动态基线校准模块的输出端与智能决策模块的输入端连接,动态基线校准模块通过卡尔曼滤波建立环境参数耦合模型:
7.根据权利要求1所述的一种基于物联网数据仓库管理系统,其特征在于,还包括可视化预警界面,所述可视化预警界面实时显示涡旋强度热力图、货品风险等级分布、机器人集群工作状态以及能耗实时监测曲线,且可视化预警界面基于webgl引擎,色阶映射周期≤1秒。
8.根据权利要求1所述的一种基于物联网数据仓库管理系统,其特征在于,所述移动机器人采用rrt*算法生成无碰撞路径,所述rrt*算法运行时满足:采样频率≥1000次/秒,路径优化迭代次数≥50次,执行以下步骤:基于slam地图构建三维占据栅格;
9.根据权利要求1所述的一种基于物联网数据仓库管理系统,其特征在于,还包括自学习模块,所述自学习模块的输出端分别与三维感知阵列模块、数字孪生引擎模块、动态基线校准模块、智能决策模块、知识图谱模块、移动机器人集群以及可视化预警界面连接,所述自学习模块每24小时执行一次全局参数优化,包括:q-learning策略更新、cfd模型参数校准以及知识图谱关系权重调整。
10.根据权利要求1所述的一种基于物联网数据仓库管理系统,其特征在于,所述系统初始化时执行:建立三维基准坐标系、部署感知节点以及训练联邦学习模型,具体包括:通过激光扫描仪建立三维基准坐标系,原点设于仓库几何中心;沿立柱每8m部署基准节点,货架层高2m处部署补充节点;联邦学习模型预训练阶段采用dirichlet分布分配参数:
技术总结
本发明公开了一种基于物联网数据仓库管理系统,包括三维感知阵列模块、数字孪生引擎模块、智能决策模块和知识图谱模块,所述三维感知阵列模块的输出端与数字孪生引擎模块的输入端连接,所述数字孪生引擎模块的输出端与智能决策模块的输入端连接,所述智能决策模块的输出端与移动机器人集群的输入端连接,所述知识图谱模块的输出端与智能决策模块的输入端连接。本系统通过感知、建模、决策、执行以及优化五层架构实现闭环管理,实现多物理场耦合仿真与多目标动态优化的深度结合,相比传统方案,路径合格率提升、预警响应速度加快、综合能耗降低,为现代智能仓库提供了高精度、强适应性的管理范式。
技术研发人员:程玉成,万军,李军,沈锦瑾,梁天,张殷日,高金鑫,殷巧春
受保护的技术使用者:安徽三禾一信息科技有限公司
技术研发日:
技术公布日:2025/3/24
- 还没有人留言评论。精彩留言会获得点赞!