基于替代图模型的干散货码头堆场无人卡车调度优化方法与流程
本发明涉及码头无人车调度,具体为基于替代图模型的干散货码头堆场无人卡车调度优化方法。
背景技术:
1、在干散货码头的作业过程中,堆场是物料转运与存储的核心区域,而无人车作为堆场内的主要运输工具,负责将物料从卸船点运送至堆场指定的堆垛位置。无人车调度的合理性与效率直接影响到整个码头的作业效率和物流成本。
2、现有的无人卡车调度方法主要基于固定路径和简单的优先级规则,如先进先出(fifo)调度或基于最短路径的调度。然而,这些传统方法在面对复杂的堆场环境时,容易出现车辆冲突、路径拥堵、调度延迟等问题,进而影响整体作业效率。此外,堆场作业的动态性和不确定性,如装卸点变化、车流量波动等,进一步加剧了无人卡车调度的复杂性。
3、为了解决上述问题,近年来一些自动引导车辆(agv)调度模型和算法得到了应用,例如基于图论的路径规划算法、动态资源预留机制等。这些方法通过优化路径选择、动态分配资源并实时调整调度方案,提升了自动引导车调度的灵活性和作业效率。
4、然而,现有技术在应用于无人驾驶卡车调度时仍存在局限性。首先,这些方法未能实现对无人卡车速度的精细化控制,无法适应卡车的多样化操作需求。其次,部分方法依赖规则驱动,缺乏严谨的数学模型作为支撑,导致优化效果有限。
5、针对这些不足,本发明提出了适用于干散货码头堆场的无人卡车调度优化方法,旨在提升调度效率和作业性能。
技术实现思路
1、为实现上述目的,本发明提供基于替代图模型的干散货码头堆场无人卡车调度优化方法,具体技术方案如下:
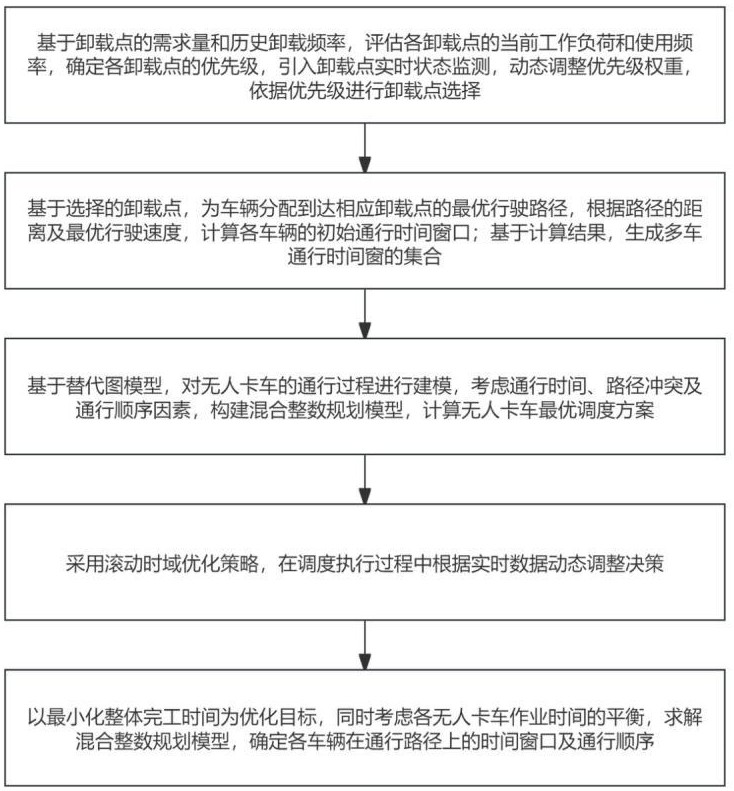
2、基于卸载点的需求量和历史卸载频率,评估各卸载点的当前工作负荷和使用频率,确定各卸载点的优先级,引入卸载点实时状态监测,动态调整优先级权重,依据优先级进行卸载点选择;
3、基于选择的卸载点,为车辆分配到达相应卸载点的最优行驶路径,根据路径的距离及最优行驶速度,计算各车辆的初始通行时间窗口;基于计算结果,生成多车通行时间窗的集合;
4、基于替代图模型,对无人卡车的通行过程进行建模,考虑通行时间、路径冲突及通行顺序因素,构建混合整数规划模型,计算无人卡车最优调度方案;
5、采用滚动时域优化策略,在调度执行过程中根据实时数据动态调整决策;
6、以最小化整体完工时间为优化目标,同时考虑各无人卡车作业时间的平衡,求解混合整数规划模型,确定各车辆在通行路径上的时间窗口及通行顺序。
7、优选的,根据卸载点容量,标记卸载点是否为可用卸载点;根据卸载点的卸载频率,计算卸载点优先级;根据卸载点容量约束和优先级设置,确定可用卸载点集合;
8、对可用卸载点集合中的卸载点按照卸载点优先级从高到低进行排序,选择优先级最高的卸载点作为当前卸载任务的目标卸载点。
9、优选的,引入卸载点状态实时监测机制,对卸载点的状态参数进行动态跟踪,包括:获取卸载点的实时卸载量,计算卸载点的实时空闲容量,获取卸载点的实时排队车辆数;
10、当存在卸载点的实时排队车辆数超过排队车辆数阈值时,触发卸载点协同调配机制,包括:在卸载点的邻近区域内,搜索空闲卸载点,即,将卸载点排队车辆引导至空闲卸载点。
11、优选的,根据选定的卸载点,结合码头的道路网络布局,构建路网拓扑图;
12、采用a*算法,计算车辆的最短路径;
13、根据路网拓扑图和a*算法,计算得出车辆-路径-时间的调度信息。
14、优选的,使用替代图模型对无人卡车的通行过程进行建模;
15、定义替代图模型和决策变量,并构建混合整数规划模型,以最小化无人卡车调度时间为目标,求解无人卡车的规划调度。
16、优选的,将整个调度时间范围划分为个连续的调度时间窗口;
17、基于构建的替代图模型和混合整数规划模型,求解得到每辆无人卡车的最优路径和对应的时间窗口。
18、优选的,以最小化整体完工时间为优化目标,同时考虑各无人卡车作业时间的平衡,求解混合整数规划模型,确定各无人卡车在通行路径上的时间窗口及通行顺序。
19、基于替代图模型的干散货码头堆场无人卡车调度优化系统,其基于所述的基于替代图模型的干散货码头堆场无人卡车调度优化方法实现,包括:卸载点选择模块、通行时间计算模块、调度计算模块、滚动优化模块以及多目标优化模块;
20、所述卸载点选择模块,基于卸载点的需求量和历史卸载频率,评估各卸载点的当前工作负荷和使用频率,确定各卸载点的优先级,引入卸载点实时状态监测,动态调整优先级权重,依据优先级进行卸载点选择;
21、所述通行时间计算模块,基于选择的卸载点,为车辆分配到达相应卸载点的最优行驶路径,根据路径的距离及最优行驶速度,计算各车辆的初始通行时间窗口;基于计算结果,生成多车通行时间窗的集合;
22、所述调度计算模块,基于替代图模型,对无人卡车的通行过程进行建模,考虑通行时间、路径冲突及通行顺序因素,构建混合整数规划模型,计算无人卡车最优调度方案;
23、所述滚动优化模块,采用滚动时域优化策略,在调度执行过程中根据实时数据动态调整决策;
24、所述多目标优化模块,以最小化整体完工时间为优化目标,同时考虑各无人卡车作业时间的平衡,求解混合整数规划模型,确定各车辆在通行路径上的时间窗口及通行顺序。
25、一种电子设备,包括:处理器和存储器,其中,所述存储器中存储有可供处理器调用的计算机程序;所述处理器通过调用所述存储器中存储的计算机程序,执行所述的基于替代图模型的干散货码头堆场无人卡车调度优化方法。
26、一种计算机可读存储介质,储存有指令,当所述指令在计算机上运行时,使得计算机执行所述的基于替代图模型的干散货码头堆场无人卡车调度优化方法。
27、本发明的有益效果:本发明通过动态评估卸载点实时状态,综合容量与排队情况确定目标卸载点,触发协同调配机制实现负荷均衡,为车辆分配最优卸载点,提升资源利用效率。
28、本发明基于选定卸载点,构建动态路网拓扑,采用a*算法计算最短路径,结合路段通行能力与实时拥堵调整路径,生成车辆的路径与时间窗集合,保障通行高效性。
29、本发明通过替代图模型描述车辆通行冲突与顺序关系,构建混合整数规划模型最小化整体完工时间,解决车辆在路径与卸载点的冲突问题,优化车辆通行顺序与时间分配。
30、本发明通过划分调度时间窗口,实时更新车辆状态与环境参数,动态求解优化模型调整车辆路径与时间窗,适应随机事件与不确定性,持续优化调度方案的执行效果。
31、本发明以最小化整体完工时间为主目标,同时平衡车辆作业时间差异,构建加权优化目标综合考虑优先级与均衡性,提升无人卡车调度的公平性和整体效率。
技术特征:
1.基于替代图模型的干散货码头堆场无人卡车调度优化方法,其特征在于,包括:
2.根据权利要求1所述的基于替代图模型的干散货码头堆场无人卡车调度优化方法,其特征在于,根据卸载点容量,标记卸载点是否为可用卸载点;根据卸载点的卸载频率,计算卸载点优先级;根据卸载点容量约束和优先级设置,确定可用卸载点集合;
3.根据权利要求2所述的基于替代图模型的干散货码头堆场无人卡车调度优化方法,其特征在于,引入卸载点状态实时监测机制,对卸载点的状态参数进行动态跟踪,包括:获取卸载点的实时卸载量,计算卸载点的实时空闲容量,获取卸载点的实时排队车辆数;
4.根据权利要求3所述的基于替代图模型的干散货码头堆场无人卡车调度优化方法,其特征在于,根据选定的卸载点,结合码头的道路网络布局,构建路网拓扑图;
5.根据权利要求4所述的基于替代图模型的干散货码头堆场无人卡车调度优化方法,其特征在于,使用替代图模型对无人卡车的通行过程进行建模;
6.根据权利要求5所述的基于替代图模型的干散货码头堆场无人卡车调度优化方法,其特征在于,将整个调度时间范围划分为个连续的调度时间窗口;
7.根据权利要求6所述的基于替代图模型的干散货码头堆场无人卡车调度优化方法,其特征在于,以最小化整体完工时间为优化目标,同时考虑各无人卡车作业时间的平衡,求解混合整数规划模型,确定各无人卡车在通行路径上的时间窗口及通行顺序。
8.基于替代图模型的干散货码头堆场无人卡车调度优化系统,其基于权利要求1至7任一项所述的基于替代图模型的干散货码头堆场无人卡车调度优化方法实现,其特征在于,包括:卸载点选择模块、通行时间计算模块、调度计算模块、滚动优化模块以及多目标优化模块;
9.一种电子设备,其特征在于,包括:处理器和存储器,其中,所述存储器中存储有可供处理器调用的计算机程序;所述处理器通过调用所述存储器中存储的计算机程序,执行权利要求1至7任一项所述的基于替代图模型的干散货码头堆场无人卡车调度优化方法。
10.一种计算机可读存储介质,其特征在于:储存有指令,当所述指令在计算机上运行时,使得计算机执行如权利要求1至7任一项所述的基于替代图模型的干散货码头堆场无人卡车调度优化方法。
技术总结
本发明涉及码头无人车调度技术领域,具体为基于替代图模型的干散货码头堆场无人卡车调度优化方法,方法包括:根据卸载点需求量和历史卸载频率确定卸载点优先级,并引入实时状态监测,动态调整优先级权重;基于选定卸载点,为车辆分配最优行驶路径,计算初始通行时间窗口,生成多车时间窗集合;使用替代图模型对无人卡车通行过程建模,构建混合整数规划模型,并采用滚动时域优化策略动态调整决策;以最小化整体完工时间和平衡作业时间为目标,求解混合整数规划模型,得到各车辆的最优调度方案;本发明通过卸载点选择和基于替代图模型的调度优化,提高码头堆场无人卡车的调度效率,为码头物流作业的自动化和智能化提供了有力支持。
技术研发人员:朱俊锋,栾健民,邹燃
受保护的技术使用者:江苏大块头智驾科技有限公司
技术研发日:
技术公布日:2025/3/24
- 还没有人留言评论。精彩留言会获得点赞!