一种海上目标航线预测方法与流程
本发明涉及航线预测,具体涉及一种海上目标航线预测方法。
背景技术:
1、精确的船舶轨迹预测对于海上交通管理具有举足轻重的意义,它能够有效预防船舶碰撞、优化航行路径以及提升航行效率。相较于陆地上车辆行驶路线的相对固定性,船舶在水域中的航行则显得更为灵活多变,这无疑加大了航行轨迹预测的难度。鉴于此,国际海事组织积极倡导采用多种导航系统,诸如驾驶台航行值班警报系统、自动识别系统(automatic identification system,简称ais)以及电子海图显示与信息系统等。随着海上交通监控技术和通信设备的不断进步,当前大多数船舶均已装备了ais系统,用于记录位置等相关信息。该系统能够与海岸ais基站实现信息互通,从而实现对船舶的识别、定位及实时监控。我国已构建起完善的沿海ais基站网络,并积累了海量的港口船舶相关信息,这些信息涵盖了船舶的静态信息(例如水上移动通信业务标识码(maritime mobile serviceidentity,简称mmsi)、尺寸及类型)、动态信息(如船舶的经纬度、对地速度及航向)以及航行相关信息(如船舶吃水量和目的地)等。通过对这些信息的深度处理,我们能够提取并分析船舶的行为特征,进而实现对船舶航行轨迹的精准预测。然而,值得注意的是,ais系统通常每2秒至3分钟便会发送一条信息,这导致了ais数据集规模的庞大。因此,如何高效地处理这些ais数据,以实现对船舶航线的精确预测,已成为当前研究的热点与难点问题。尽管当前已有若干船舶航线预测技术问世,但它们均面临一定的局限性。针对船舶轨迹数据缺失等挑战,现有技术依托改进后的卡尔曼滤波算法,构建了多项式卡尔曼滤波模型。然而,这类基于物理建模的方法在构建数学方程时难度较大,且难以应对复杂多变的环境因素。
技术实现思路
1、发明目的:本发明的目的是提供一种海上目标航线预测方法,解决复杂场景下的轨迹预测问题。
2、技术方案:本发明所述的一种海上目标航线预测方法,包括以下步骤:
3、(1)收集并预处理历史ais数据,计算引入新的特征,考虑复杂场景下本船舶的影响;划分训练集、验证集和测试集;
4、(2)使用卷积神经网络提取局部时空相关性特征;
5、(3)使用双向长短时记忆网络建模目标的时序依赖性;
6、(4)利用注意力机制加权提取关键时刻或特征;
7、(5)独立训练每个模型,并在测试集上评估融合后的模型性能;
8、(6)使用移动窗口技术提取和输出固定长度数据,完成从时间段到时间段的预测。
9、进一步的,步骤(1)中,收集自动识别系统ais历史数据,并提取所需要的包括时间、经度、纬度、对地航速、对地航向以及mmsi特征;
10、进一步的,步骤(1)中,对ais数据进行预处理,包括异常数据处理、缺省值处理和归一化;基于船舶的动态信息,计算得到船舶和目标船舶的相对位置、相对航向、相对速度和相对质量,作为新的特征加入,得到复杂场景下船舶间的距离、航行轨迹重合情况和船舶类型对船舶轨迹的影响。
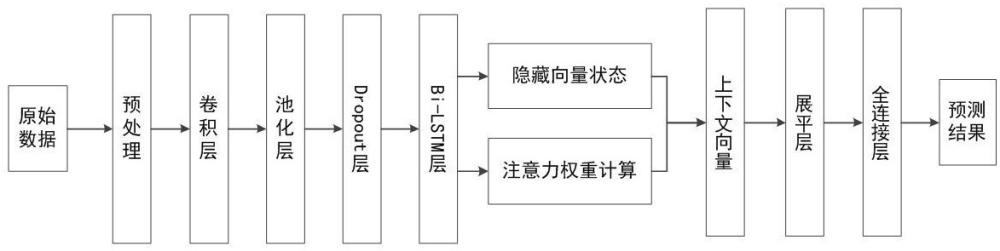
11、进一步的,步骤(2)具体如下:使用卷积神经网络cnn从输入的航线轨迹中提取局部时空相关性特征:输入数据经过归一化处理后首先进入卷积层进行卷积操作提取数据特征; 随后进入池化层,使输出维度减小,其中,池化层选取了平均池化层;池化层连接dropout层;其中,dropout层是让每一个神经元以概率停止工作,即池化层输出的每一维数据都由概率变为0。
12、进一步的,步骤(3)具体如下:使用双向长短时记忆网络bi-lstm构建目标的时序依赖性;其中,bi-lstm神经网络由两层lstm组成,将同一输入的前向、后向lstm单元的输出值进行拼接, 得到bi-lstm网络的输出向量。
13、进一步的,步骤(4)具体如下:利用隐藏状态与目标状态之间的相似度,通过打分函数计算注意力权重,度量每个隐藏状态的重要性;通过 函数,将权重归一化为概率分布;使用归一化后的注意力权重对隐藏状态进行加权求和;由展平层将将输入数据转化为一维数据,最后经过一个全连接层输出最终结果;其中,打分函数是计算输入序列中每个时间步的特征与当前输入的目标状态之间的相似度,公式如下:
14、;
15、其中,是输入序列中第时间步的隐藏状态,是查询输入,是隐藏状态和之间的相似度打分。
16、进一步的,步骤(5)具体如下:在构建好卷积神经网络、双向长短时记忆网络和注意力机制的基础上,将三个模型cnn、bi-lstm 和注意力机制通过串联的方式组合;定义损失函数,使用评估指标包括 mse、mae、准确率、召回率进行评估;其中,损失函数均方误差和均方根误差评估模型预测性能。
17、进一步的,步骤(6)具体如下:使用移动窗口技术,提取固定长度的数据链输入到训练好的模型中,输出下一个时刻的经纬度、航向和航速;随后将窗口移动一个单位长度,将刚刚输出的结果作为输入数据的一部分,移除最老的时刻的数据,进行下一个时刻的预测;直到输出目标窗口最后一个时刻的轨迹结果,将输出结果组合在一起,作为目标时间段的轨迹预测结果输出。
18、本发明所述的一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述计算机程序被加载至处理器时实现任一项所述的一种海上目标航线预测方法。
19、本发明所述的一种存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现任一项所述的一种海上目标航线预测方法。
20、有益效果:与现有技术相比,本发明具有如下显著优点:通过融合卷积神经网络、长短时记忆网络以及注意力机制,充分利用了各模型的优势,显著增强了预测的准确性。此外,在实际复杂航行场景中,针对不同船舶间轨迹以及船舶类型的相互影响,本发明创新性地引入了相对位置、航向、航速和相对质量作为新的特征参数,这些特征不仅贴合实际,而且极大地拓宽了应用前景。为了提高模型的速度和精度,增强其实用性,本发明秉持移动窗口的理念,实现了从一个时间段到另一个时间段的预测,有效弥补了模型对于长时间段的预测精度降低的缺陷,以及因特征参数增加带来的预测速度减缓的问题。本发明能够精确预测目标船舶的未来航线,为船舶驾驶员提供有力的决策支持,从而有效提升海上航行的安全性。
技术特征:
1.一种海上目标航线预测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种海上目标航线预测方法,其特征在于,步骤(1)中,收集自动识别系统ais历史数据,并提取所需要的包括时间、经度、纬度、对地航速、对地航向以及mmsi特征。
3.根据权利要求1所述的一种海上目标航线预测方法,其特征在于,步骤(1)中,对ais数据进行预处理,包括异常数据处理、缺省值处理和归一化;基于船舶的动态信息,计算得到船舶和目标船舶的相对位置、相对航向、相对速度和相对质量,作为新的特征加入,得到复杂场景下船舶间的距离、航行轨迹重合情况和船舶类型对船舶轨迹的影响。
4.根据权利要求1所述的一种海上目标航线预测方法,其特征在于,步骤(2)具体如下:使用卷积神经网络cnn从输入的航线轨迹中提取局部时空相关性特征:输入数据经过归一化处理后首先进入卷积层进行卷积操作提取数据特征; 随后进入池化层,池化层连接dropout层;其中,dropout层是让每一个神经元以概率停止工作,即池化层输出的每一维数据都由概率变为0。
5.根据权利要求1所述的一种海上目标航线预测方法,其特征在于,步骤(3)具体如下:使用双向长短时记忆网络bi-lstm构建目标的时序依赖性;其中,bi-lstm神经网络由两层lstm组成,将同一输入的前向、后向lstm单元的输出值进行拼接, 得到bi-lstm网络的输出向量。
6.根据权利要求1所述的一种海上目标航线预测方法,其特征在于,步骤(4)具体如下:利用隐藏状态与目标状态之间的相似度,通过打分函数计算注意力权重,度量每个隐藏状态的重要性;通过 函数,将权重归一化为概率分布;使用归一化后的注意力权重对隐藏状态进行加权求和;由展平层将输入数据转化为一维数据,最后经过一个全连接层输出最终结果;其中,打分函数是计算输入序列中每个时间步的特征与当前输入的目标状态之间的相似度,公式如下:
7.根据权利要求1所述的一种海上目标航线预测方法,其特征在于,步骤(5)具体如下:在构建好卷积神经网络、双向长短时记忆网络和注意力机制的基础上,将三模型cnn、bi-lstm 和注意力机制通过串联的方式组合;定义损失函数,使用评估指标包括 mse、mae、准确率、召回率进行评估;其中,损失函数均方误差和均方根误差评估模型预测性能。
8.根据权利要求1所述的一种海上目标航线预测方法,其特征在于,步骤(6)具体如下:使用移动窗口技术,提取固定长度的数据链输入到训练好的模型中,输出下一个时刻的经纬度、航向和航速;随后将窗口移动一个单位长度,将刚刚输出的结果作为输入数据的一部分,移除最老的时刻的数据,进行下一个时刻的预测;直到输出目标窗口最后一个时刻的轨迹结果,将输出结果组合在一起,作为目标时间段的轨迹预测结果输出。
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述计算机程序被加载至处理器时实现根据权利要求1-8任一项所述的一种海上目标航线预测方法。
10.一种存储介质,所述存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现根据权利要求1-8任一项所述的一种海上目标航线预测方法。
技术总结
本发明公开了一种海上目标航线预测方法,包括以下步骤:(1)收集并预处理历史AIS数据,计算引入新的特征,考虑复杂场景下本船舶的影响;划分训练集、验证集和测试集;(2)使用卷积神经网络提取局部时空相关性特征;(3)使用双向长短时记忆网络建模目标的时序依赖性;(4)利用注意力机制加权提取关键时刻或特征;(5)独立训练每个模型,并在测试集上评估融合后的模型性能;(6)使用移动窗口技术提取和输出固定长度数据,完成从时间段到时间段的预测;本发明能够精确预测目标船舶的未来航线,为船舶驾驶员提供有力的决策支持,从而有效提升海上航行的安全性。
技术研发人员:宋筱轩,霍焱焱,吴俊杰,丁帅,冯燕,张辉,邱博瑨,孙光耀
受保护的技术使用者:中国电子科技集团公司第二十八研究所
技术研发日:
技术公布日:2025/3/27
- 还没有人留言评论。精彩留言会获得点赞!