一种基于动态决策树的海事行为意图预测方法与流程
本发明涉及海上交通工具,具体涉及一种基于动态决策树的海事行为意图预测方法。
背景技术:
1、目前,意图识别与预测已被应用到多个领域,包括人体和机器行为、道路交通、航空航天和军事协同对抗等。常用的机器学习和人工智能技术包括隐马尔科夫模型(hmm)、卷积神经网络(cnn)、长短期记忆网络模型(lstm)等。尽管机器学习在许多方面表现出色,但也存在一些问题和挑战。例如,基于cnn的意图识别与预测方法能有效识别和分类高维度的图像,但难以处理低维度的连续变量;基于lstm的方法在处理长序列数据时计算耗时长,容易产生梯度消失现象;基于强化学习的方法要求对象具有离散的动作和状态,无法对连续的动作和状态进行建模。
2、与现有研究相比,海事行为意图的情况更加复杂多样,涉及的影响因素更多,对模型中特征参数的要求更高,使得对船舶的行为意图预测、特别是实时预测更加困难。
技术实现思路
1、发明目的:本发明的目的是提供一种基于动态决策树的海事行为意图预测方法,通过融合船舶状态和环境因素的多模态海事数据,构建可自优化的动态决策树预测模型,以实时预测船舶的行为意图。
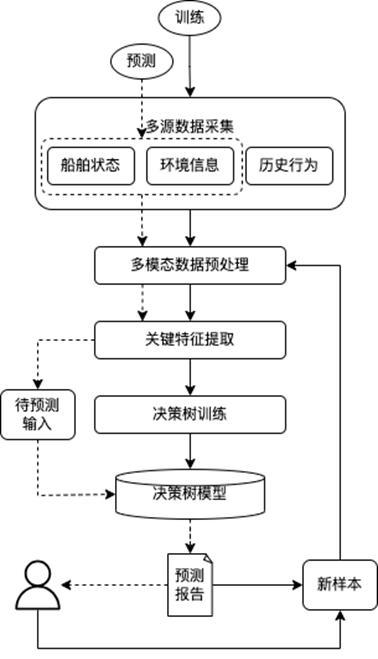
2、技术方案:本发明所述的一种基于动态决策树的海事行为意图预测方法,包括以下步骤:
3、(1)采集船舶数据和环境数据,并对多模态数据进行预处理;
4、(2)从采集到的数据中提取关键的船舶行为和环境信息特征,引入多模态交互特征;
5、(3)基于历史数据,构建决策树模型并进行训练;
6、(4)根据输入的实时数据预测行为意图,将预测结果反馈到平台;
7、(5)通过累积的数据不断修正和优化决策树结构。
8、进一步的,步骤(1)中,通过自动识别系统,获取船舶的实时位置、速度、航向;通过雷达和gps系统,采集附近船舶的距离、方位和速度;通过气象与海况数据,分析风速、风向、浪高、洋流方向影响船舶航行的环境因素;通过航海记录仪,获取海上航行的历史数据;预处理包括:对采集到的多模态数据进行时间同步和坐标对齐;使用插值法补全船舶位置或速度;使用历史数据均值或中位数填充环境因素;删除缺失值过多的数据以及数据中的异常值。
9、进一步的,步骤(2)中,提取船舶状态信息特征包括位置特征、速度特征、航向特征、加速度特征、航行状态;提取环境因素特征包括风速和风向、海浪高度、洋流方向、能见度、气象特征。
10、进一步的,步骤(2)中,引入多模态交互特征包括航行速度与风速的关系、船舶加速度和海浪之间的关联性;然后对特征进行标准化或归一化。
11、进一步的,航行速度与风速的关系公式如下:风速与航速比,用于以衡量风速对船舶航行速度的影响,计算公式为:
12、进一步的,船舶加速度和海浪之间的关联性具体如下:航行偏差与海流方向偏差,用于捕捉环境洋流对船舶航行方向的干扰程度,计算公式为:
13、。
14、进一步的,步骤(3)包括以下步骤:
15、(31)将数据整理成特定格式,包括:特征矩阵即每行代表一个样本,每列表示一个特征和标签向量即对应每个样本的行为意图;将数据集分为训练集和测试集;
16、(32)训练决策树模型的过程为:
17、(321)选择根节点特征;
18、(322)按特征分裂数据集;
19、(323)对每个子集重复上述分裂过程,直到满足停止条件;
20、(324)在训练完成后执行剪枝。
21、进一步的,步骤(322)具体如下:使用信息增益比选择最佳的分裂特征,公式如下:
22、;
23、其中,表示特征 a对数据集 d的信息增益;为数据集的熵,计算公式为:
24、;
25、其中,是标签的比例,是类别数量;
26、为条件熵,计算在特征的条件下数据集d的熵,计算公式为:
27、;
28、其中,是在特征取值为时的数据子集;
29、特征a的分裂信息的计算公式为:
30、;
31、信息增益比的计算公式为:
32、。
33、进一步的,步骤(323)具体如下:根据选择的特征对数据集进行分裂,从而形成新的子节点;对每个子集重复选择分裂特征的过程,直到满足以下任一停止条件:(a)节点样本数小于特定阈值;(b)达到最大树深度;(c)数据集完全纯净即所有样本属于同一类别。
34、进一步的,步骤(324)具体如下:在训练完成后对决策树模型进行后剪枝,从叶节点开始,逐步向上,通过评估每个节点的表现,剪去不必要的节点;其中,剪枝时考虑的因素包括:(d)节点的错误率,如果剪去该节点后模型在验证集上的错误率降低,则进行剪枝;(e)最小描述长度,评估模型复杂度与误差之间的权衡;(f)交叉验证剪枝,使用交叉验证方法评估剪枝的效果,剪去在验证集上表现不佳的节点。
35、有益效果:与现有技术相比,本发明具有如下显著优点:本发明收集多模态海事数据并提取相关特征,使得数据更适合于模型训练,更好地面向复杂的水域环境和特定的海事行为意图。基于决策树模型,使用历史数据进行训练,能够使得预测模型具有高精度,同时兼顾实时预测所需的高效性。此外,动态决策树可以根据不断累积的航行数据进行持续优化,以适应不同环境和海域条件。通过上述方法实现的海事行为意图预测,可以作为船舶驾驶的自动化辅助,能够极大提升环境感知和决策能力,确保海上航行的安全。
技术特征:
1.一种基于动态决策树的海事行为意图预测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于动态决策树的海事行为意图预测方法,其特征在于,步骤(1)中,通过自动识别系统,获取船舶的实时位置、速度、航向;通过雷达和gps系统,采集附近船舶的距离、方位和速度;通过气象与海况数据,分析风速、风向、浪高、洋流方向影响船舶航行的环境因素;通过航海记录仪,获取海上航行的历史数据;预处理包括:对采集到的多模态数据进行时间同步和坐标对齐;使用插值法补全船舶位置或速度;使用历史数据均值或中位数填充环境因素;删除缺失值过多的数据以及数据中的异常值。
3.根据权利要求1所述的一种基于动态决策树的海事行为意图预测方法,其特征在于,步骤(2)中,提取船舶状态信息特征包括位置特征、速度特征、航向特征、加速度特征、航行状态;提取环境因素特征包括风速和风向、海浪高度、洋流方向、能见度、气象特征。
4.根据权利要求1所述的一种基于动态决策树的海事行为意图预测方法,其特征在于,步骤(2)中,引入多模态交互特征包括航行速度与风速的关系、船舶加速度和海浪之间的关联性;然后对特征进行标准化或归一化。
5.根据权利要求4所述的一种基于动态决策树的海事行为意图预测方法,其特征在于,航行速度与风速的关系公式如下:航行速度与风速的关系公式如下:风速与航速比,用于以衡量风速对船舶航行速度的影响,计算公式为:。
6.根据权利要求4所述的一种基于动态决策树的海事行为意图预测方法,其特征在于,船舶加速度和海浪之间的关联性具体如下:航行偏差与海流方向偏差,用于捕捉环境洋流对船舶航行方向的干扰程度,计算公式为:
7.根据权利要求1所述的一种基于动态决策树的海事行为意图预测方法,其特征在于,步骤(3)包括以下步骤:
8.根据权利要求7所述的一种基于动态决策树的海事行为意图预测方法,其特征在于,步骤(322)具体如下:使用信息增益比选择最佳的分裂特征,公式如下:
9.根据权利要求7所述的一种基于动态决策树的海事行为意图预测方法,其特征在于,步骤(323)具体如下:根据选择的特征对数据集进行分裂,从而形成新的子节点;对每个子集重复选择分裂特征的过程,直到满足以下任一停止条件:(a)节点样本数小于特定阈值;(b)达到最大树深度;(c)数据集完全纯净即所有样本属于同一类别。
10.根据权利要求7所述的一种基于动态决策树的海事行为意图预测方法,其特征在于,步骤(324)具体如下:在训练完成后对决策树模型进行后剪枝,从叶节点开始,逐步向上,通过评估每个节点的表现,剪去不必要的节点;其中,剪枝时考虑的因素包括:(d)节点的错误率,如果剪去该节点后模型在验证集上的错误率降低,则进行剪枝;(e)最小描述长度,评估模型复杂度与误差之间的权衡;(f)交叉验证剪枝,使用交叉验证方法评估剪枝的效果,剪去在验证集上表现不佳的节点。
技术总结
本发明公开了一种基于动态决策树的海事行为意图预测方法,包括以下步骤:(1)采集船舶数据和环境数据,并对多模态数据进行预处理;(2)从采集到的数据中提取关键的船舶行为和环境信息特征,引入多模态交互特征;(3)基于历史数据,构建决策树模型并进行;(4)根据输入的实时数据预测行为意图,将预测结果反馈到平台;(5)通过累积的数据不断修正和优化决策树结构;本发明能够极大提升环境感知和决策能力,确保海上航行的安全。
技术研发人员:宋筱轩,王鹏,孙文俊,柳登丰,叶建军,汤学达,张媛
受保护的技术使用者:中国电子科技集团公司第二十八研究所
技术研发日:
技术公布日:2025/3/27
- 还没有人留言评论。精彩留言会获得点赞!